
RDM6300是一款能读125K RFID卡的模块,我们可以利用此身份识别功能结合舵机完成门禁的设计。今天就详细介绍其具体实现方法。
所需配件:
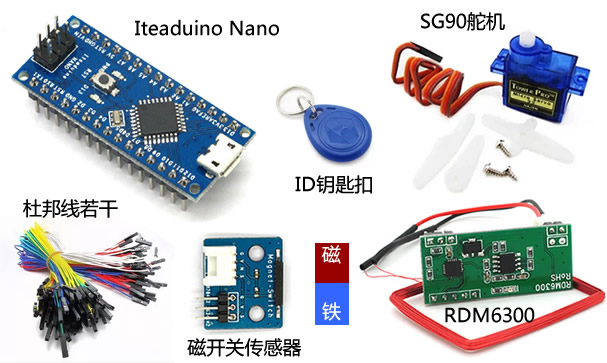
电源方面还需要一根micro数据线和一个移动电源。
步骤:
1. 读取卡号:
Rdm6300是直接串口读取卡信息的,包括卡号。所以取号很简单,硬件连接如下:
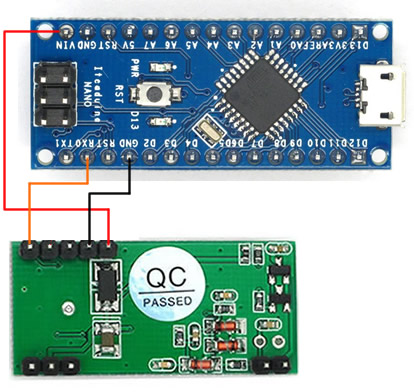
打开arduino IDE烧写一段空程序即可使用串口监视器查看卡号:
void setup(){}
void loop(){}
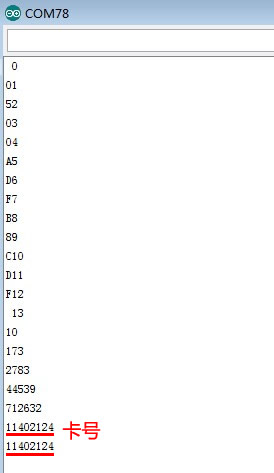
复制卡号,记下来。多张卡,就记下多个号。
2. 烧写固件:
下面开始进入主题了!
先给Nano烧写此次的门禁代码,因为我们的是micro的接口,所以要用micro的USB数据线。
纯代码,无需调用库,请给我们新来的小小工程师一点掌声,谢谢!
当然代码方面还可以优化,这个就交给大家来完善吧。
所需配件:
电源方面还需要一根micro数据线和一个移动电源。
步骤:
1. 读取卡号:
Rdm6300是直接串口读取卡信息的,包括卡号。所以取号很简单,硬件连接如下:
打开arduino IDE烧写一段空程序即可使用串口监视器查看卡号:
void setup(){}
void loop(){}
复制卡号,记下来。多张卡,就记下多个号。
2. 烧写固件:
下面开始进入主题了!
先给Nano烧写此次的门禁代码,因为我们的是micro的接口,所以要用micro的USB数据线。
纯代码,无需调用库,请给我们新来的小小工程师一点掌声,谢谢!
当然代码方面还可以优化,这个就交给大家来完善吧。
long Password1=11402124;//可识别卡号1
long Password2=7927290;//可识别卡号2
int flag=0,RX_Flag=0;//串口标志
char Code[14]; //用于存放读到串口数据
long Num=0;//解码数据
int serpin=7;//舵机引脚定义
int Door=0;
void Read_ID(void)
{
}
void pulse( int serpin,int angle)
{
}
void setup()
{
}
void loop()
{
//
//
//
//
//
//
//
}
逻辑设计:RDM6300识别到正确的卡号后,舵机旋转180度开门,如果门没被推开,磁传感器还能感应到磁力,3秒后舵机归位锁门;如果读卡成功,推门进入,磁传感器感应不到磁力,舵机保持180度开门状态,关上门,磁传感器感应到磁力,延时一秒舵机归位锁门。
使用时需将待识别的卡号修改为自己的,可自行添加多个可识别的卡号。
3. 硬件连接:
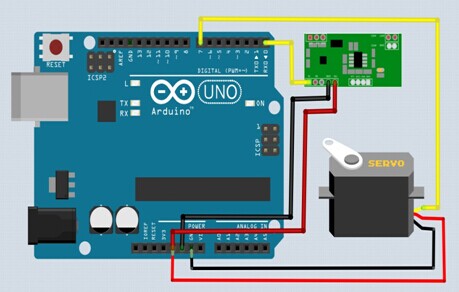
按图链接主控板Iteaduino NANO和RDM6300模块及舵机,如图所示,用硬件串口读取RDM6300所识别的卡号,用数字输出脚7脚输出PWM波控制舵机,A0取磁传感器的值。Nano刚好有3对电源脚。
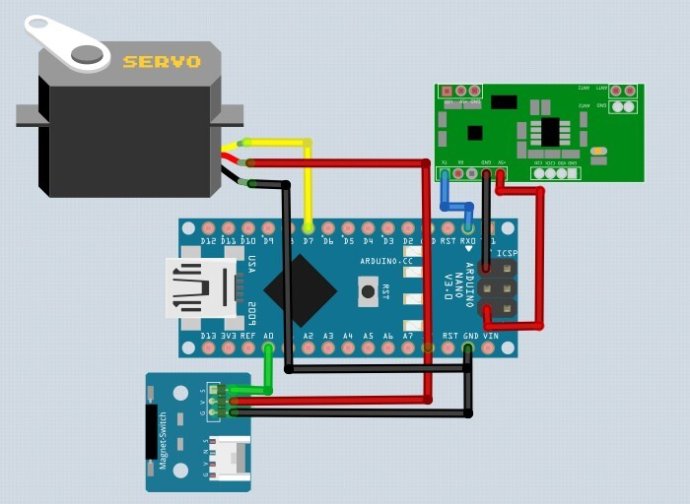
下面是uno的接线示意图,可以不用到磁开关,看个人实际应用吧。
最终效果如图,当然小伙伴们可以用个盒子把配件都装起来。

相关产品资料下载:
RDM6300 ID读卡模块:http://pan.baidu.com/s/1kTytG7X
micro Nano资料及驱动:http://pan.baidu.com/s/1hqCDaq4
使用时需将待识别的卡号修改为自己的,可自行添加多个可识别的卡号。
3. 硬件连接:
按图链接主控板Iteaduino NANO和RDM6300模块及舵机,如图所示,用硬件串口读取RDM6300所识别的卡号,用数字输出脚7脚输出PWM波控制舵机,A0取磁传感器的值。Nano刚好有3对电源脚。
下面是uno的接线示意图,可以不用到磁开关,看个人实际应用吧。
最终效果如图,当然小伙伴们可以用个盒子把配件都装起来。
相关产品资料下载:
RDM6300 ID读卡模块:http://pan.baidu.com/s/1kTytG7X
micro Nano资料及驱动:http://pan.baidu.com/s/1hqCDaq4
技术讨论群:272420347