本科生毕业设计(论文)
第1章 绪 论1.1 微机继电保护的历史背景微机继电保护指的是以数字式计算机为基础而构成的继电保护。它起源于20世纪60年代中后期,是在英国、澳大利亚和美国的一些学者的倡导下开始进行研究的。60年代中期,有人提出用小型计算机实现继电保护的设想,但是由于当时计算机的价格昂贵,同时也无法满足高速继电保护的技术要求,因此没有在保护方面取得实际应用,但由此开始了对计算机继电保护理论计算方法和程序结构的大量研究,为后来的继电保护发展奠定了理论基础。计算机技术在70年代初期和中期出现了重大突破,大规模集成电路技术的飞速发展,使得微型处理器和微型计算机进入了实用阶段。价格的大幅度下降,可靠性、运算速度的大幅度提高,促使计算机继电保护的研究出现了高潮。在70年代后期,出现了比较完善的微机保护样机,并投入到电力系统中试运行。80年代,微机保护在硬件结构和软件技术方面日趋成熟,并已在一些国家推广应用。90年代,电力系统继电保护技术发展到了微机保护时代,它是继电保护技术发展历史过程中的第四代。
我国的微机保护研究起步于20世纪70年代末期、80年代初期,尽管起步晚,但是由于我国继电保护工作者的努力,进展却很快。经过10年左右的奋斗,到了80年代末,计算机继电保护,特别是输电线路微机保护已达到了大量实用的程度。我国对计算机继电保护的研究过程中,高等院校和科研院所起着先导的作用。从70年代开始,华中理工大学、东南大学、华北电力学院、西安交通大力自动化研究院都相继研制了不同原理、不同型式的微机保护装置。1984年原华北电力学院研制的输电线路微机保护装置首先通过鉴定,并在系统中获得应用,揭开了我国继电保护发展史上的新一页,为微机保护的推广开辟了道路。在主设备保护方面,东南大学和华中理工大学研制的发电机失磁保护、发电机保护和发电机-变压器组保护也相继于1989年、1994年通过鉴定,投入运行。南京电力自动化研究院研制的微机线路保护装置也于1991年通过鉴定。天津大学与南京电力自动化设备厂合作研制的微机相电压补偿式方向高频保护,西安交通大学与许昌继电器厂合作研制的正序故障分量方向高频保护也相继于1993年、1996年通过鉴定。至此,不同原理、不同机型的微机线路和主设备保护各具特色,为电力系统提供了一批新一代性能优良、功能齐全、工作可靠的继电保护装置。因此到了90年代,我国继电保护进入了微机时代。随着微机保护装置的研究,在微机保护软件、算法等方面也取得了很多理论成果,并且应用于实际之中。
1.2 微机继电保护的现状虽然我国在计算机继电保护方面的研究工作起步较晚,但发展很快,并卓有成效。1984年华北电力学院研制得MDP—1微机距离保护装置经试运行后通过了科研鉴定,标志着我国继电保护从模拟式向数字式转变的开始。现在,微机继电保护在我国已占主要地位。
微机继电保护装置与过去大量使用的整流型或晶体管型继电保护装置相比,有其突出的优点。第一,微机继电保护以微型计算机为基础,用数字电路代替传统的模拟电路,软硬件技术的成熟与完善,使得微机保护具有巨大的计算、分析和逻辑判断能力,有存储记忆功能,可以实现性能完善且复杂的保护原理。第二,所有的计算、逻辑判断均由软件完成,而成熟的软件一次性设计测试完成后,就不必在投产前再逐项试验,使得微机保护维护调试方便;如果要对微机保护的工作原理、功能配置和运行结构进行改进,只需要对软件进行修改,不必改动硬件电路。第三,微机保护可连续不断地对自身的工作情况进行自检,其工作可靠性很高。第四,微机保护装置能保证在任何时刻都不断地采样计算,反复准确地校核,动作的准确率很高。第五,微机保护可以做到硬件和软件资源共享,在不增加任何硬件的情况下,只需增加一些软件就可以获得如故障录波、故障测距、事故顺序记录等辅助功能,这对于简化保护的调试、事故分析和事故后的处理等都有重大意义。第六,完善的人机界面使得装置使用灵活、方便,人机交流友好。第七,微机保护重集成了串行通信功能,与变电所微机监控系统的通信联络使微机保护具有远方监控的特点,管理人员可以随时监测保护装置的运行状态、调用数据和改变定值,为现代化管理提供物质条件,并将微机保护纳入变电所综合自动化系统。
随着计算机技术、微电子技术、网络通信技术、信息技术的不断发展,最新研制的微机继电保护的体积更小,功能更强,性能更优。如硬件结构方面,采用具有强大数据处理功能的DSP微处理芯片,低功耗可编程逻辑芯片和高集成度专用芯片后,使装置的体积、功耗、可靠性等方面得到很大的提升。微机继电保护正向微型化、网络化、智能化和人性化方面高速发展。
应用微型计算机或微处理机构成的继电保护。1965年已开始计算机保护的研究工作,但由于在价格、计算速度和可靠性方面的原因,发展缓慢。70年代初、中期,大规模集成电路技术的飞速发展,微型计算机和微处理机问世,价格大幅度下降,计算速度不断加快,可靠性也大为提高,微机继电保护的研制随之出现高潮,到70年代后期已趋于实用。
1.3 微机继电保护的发展方向
由于计算机的优越存储能力,可以方便地得到保护需要的故障分量并准确地予以保持,这是模拟式保护装置难以达到的。由于计算机的强大运算能力,可以实现一些以往模拟式保护装置无法实现的复杂保护动作特性、自适应性的定值或特性改变以及良好的自检功能。同常规继电保护相比,微机继电保护的抗电磁干扰能力较弱,因此,它的广泛应用受到一定的限制。应用微机继电保护时,应特别注意解决好电磁兼容性问题。
电力是当今世界使用最为广泛,地位最为重要的能源,电力系统的安全稳定运行对国民经济、人民生活乃至社会稳定都有着极为重大的影响。电力系统由各种电气元件组成。这里电气元件是一个常用术语,它泛指电力系统中的各种在电气上可独立看待的电气设备、线路,器具等。电力系统继电保护的基本作用是,在全系统范围内,按指定分区实时地检测各种故障和不正常运行状态,快速及时地采取故障隔离或告警等措施,以求最大限度地维持系统的稳定、保持供电的连续性、保障人身的安全、防止或减轻设备的损坏。
线路的电流电压保护构成简单,可靠性好,用于中、低压电网一般能满足对保护性能的要求。但是,由于电流电压保护的灵敏度受系统运行方式的影响,有时候保护范围很小,甚至可能保护范围为零,对长距离重负荷线路即使是定时限过电流保护也不一定能满足灵敏度要求。另外,该保护的整定计算也比较麻烦等。这些使得其在35KV及以上的复杂网络中很难适用,为此,研究出性能更好的保护原理和方案,这就是距离保护。距离保护能克服电流电压保护受系统运行方式影响大的缺点。
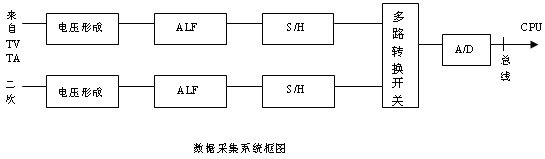
第2章 110KV线路微机距离保护系统设计2.1数据采集系统设计数据采集系统包括电压形成回路、ALF、采样保持电路S/H、模拟多路转换开关MPX及模数转换器A/D五部分。
同传统保护一样,微机保护的输入信号来自被保护线路或设备的电流互感器,电压互感器的二次侧。这些互感器的二次电流或电压一般数值较大,变化范围也较大,不适应模数转换器的工作要求,故需对它进行变换。一般采用各种中间变换器来实现这种变换。对于电流的变换一般采用电流变换器并在其二次侧并电阻以取得所需电压,改变电阻值可以改变输出范围的大小。此外,也可以采用电抗变换器,二者各有优缺点。电抗变换器的优点是由于铁芯带气隙而不易饱和,线性范围大,同时有移相作用;其缺点是会抑制直流分量,放大高频分量。因此当一次流过非正弦电路时,其二次电压波形将发生畸变。不过,其抑制非周期分量作用在某些应用场合也可能成为优点;而移相作用在微机保护中很容易地通过软件来完成,因此在电压形成回路中是否有移相作用意义不大。电流变换器最大的优点是只要铁芯不饱和,其付方电流及并联电阻上电压的波形基本保持与原方电流波形相同且同相,即它的变换可使原信息不失真。但是,电流变换器在非周期分量的作用下容易饱和,线性度差,动态范围小。
采样保持电路由一个模拟开关、保持电容及两个阻抗变换器组成。开关受采样脉冲控制,在脉冲到来时模拟开关闭合,此时电路处于采样状态,保持电容上的电压为在采样时刻的电压值。在模拟开关断开时,电容上保持住原采样电压,电路处在保持状态。若阻抗变换器1和阻抗变换器2的输入阻抗为无限大,输出阻抗为零,电容无泄露,采样脉冲宽度为零,则其为一理想采样保持器。但这种理想状态是不可能实现的,因为在采样状态时,电容上的电压不可能实现的,输入电压,而有一个过渡过程,在保持状态,电容上的电压也不可能毫不衰减地保持住模拟开关断开前的电压有衰减量。目前采用的采样保持电路都是把几部分集
成在一片芯片上,保持电容是外接的由用户选择。对微机保护系统来讲,在故障出瞬,电压,电流中可能含有很高的频率成分,为了防止频率混叠,采样频率必然选的很高,从而要求硬件速度快,使成本增高,有时甚至难以做到。实际上目前大多数保护原理都是基于工频分量的,故可以在采样之前使输入信号限制在一定的频带之内,即降低输入信号的最高频率,从而就可以降低频率,这样一方面可以降低对硬件的速度要求,另一方面也不至于产生频率混叠现象。微机保护装置通常是几路模拟量输入通道公用一个A/D芯片,采用多路转换开关将各通道保持的模拟信号时接通A/D变换器。多路转换开关是电子型的,通道切换受微机控制。多路转换开关包括选择接通路数的二进制译码电路和它控制的各路电子开关,他们被集中在一片集成电路芯片上。
模数转换器ADC的基本原理,每个AD转换器都有一个满刻度值,这个满刻度值也叫基准电压。AD转换就是将输入的离散的模拟量与基准电压进行比较,按照四舍五入的原则,编成二进制代码的数字信号。模数转换一般要用到数模转换器,数模转换器的作用是将数字量转换成模拟量。A/D转换器用的是AD574,是由美国模拟器件公司生产,其主要作用有参考电压、偏置电压、模拟量输入、模拟地和数字地、数字量输出、控制线和状态线。
2.1.1 数据传输方案在数据传输部分的设计中,调研了基于USB、火线之类的解决方案。采用这些协议开发设备可以使数据采集部分的设计比较简单。目前,主板一般都支持USB1.1,不需要设计专门的数据采集卡。如果采用火线协议,TI的OHCI-lynx系列的芯片集成了一个PCI接口和火线的协议层。但是目前USB1.1标准还达不到所需要的带宽,而USB2.0还没有得到主板的普遍支持。采用火一虽然使得数据接收端的设计相对简单。但是由于火线是一条多主的总线,每发送一帧数据都要打一个包头,由于链路层协议的复杂,包头的结构也相当的冗长,对于数据发送端链路层的大量寄存器配置,仅用CPLD实现,调试麻烦,不灵活。如果采用MCU来实现能够对上百Mbps的数据流实时地打包的数据发送系统,复杂程序太高,严重影响项目进度。
依据开发难度、成本,最后选择了两种方案来构建传输系统:低压差分和HOTlink。
低压差分信号传输器件一般应用于背板信号互连之类的短距离通讯中,例如交换机系统。LVDS标准定义传输距离为10m,实际工程实践中发现10Mbps的数据流在五类双绞线上使用低压差分至少可以在40m左右的传输距离稳定传输。目前国内的应用中一般在超过100m的情况下使用一个LVDS的中继板。普遍使用的LVDS器件是国家半导体的90C031,90C032,1:1发送接收模块,不带复用与解复用的功能。如果需要两根串行线传输方案,国家半导体也提供复用比可达到14:1与1:14的复用与解复用LVDS器件。LVDS器件使用比较方便,不需要内部编程与外部的逻辑控制,在PCB版图设计时注意差分信号线基本等长、匹配电阻等瓿即可正常工作。
HOTLink第二代产品可以支持1500Mbps的传输速率,支持8位1、6位、32位数据接口,性能大大提高。当然基于HOTLink设计通讯产品难度相对要大一些,应用HOTLink传输系统需要比较复杂的外部状态机的控制来保证接收端时钟正确恢复.而且由于系统时钟频率较高,PCB版图设计需要比较研究,要求设计者仔细考虑各种电磁干扰影响。
2.1.2 数据采集系统方案基于计算机的数据采集系统可以依据与计算机的接口同而分类。以目前工程应用来看,基于ISA总线的系统虽然带宽足够低速采集使用,但是由于主板生产商趋向于不再支持ISA,面监被USB接口产品取代的趋势。而高速数据采集系统主要还是基于PCI总线传输数据。
一般来说,基于PCI总线的板卡可以分成信号处理板与数据采集板。对于二者的设计思想以及相应的PCI接口芯片的选择也有所不同。数据采集系统一般为了采集数据流而设计。由于PCI总线是一个共享总线,仲裁算法一般是公平竞争,事实上132Mbytes/s的峰值速率仅仅是一个理想值。实际中要想稳定可靠地采集数据流,采集卡上必须有大小合适的缓存。数据采集系统从数据源到PC的整个体系是一个先进先出结构,核心问题是如何经济有效地设计出尽可能大的先进先出的缓存系统。最简单的实现方式是直接使用FIFO器件作为系统的缓存,当然这也是最昂贵的方案。也可以使用双口RAM来实现FIFO结构。最廉价的方案是使用SRAM与双路选择器以及地址发生器实现大FIFO阵列。付出的代价使整个系统设计的复杂程序提高。
一般的PCI总线信号处理卡的总线部分设计重点在于如何将卡上的设备映射到系统的内存空间中云。常见的PCI接口芯片提供了PCI端总线与卡上局部端总线相互转换的能力。而在数据采集卡的设计中,卡上的FIFO显然只能作为一个端口访问,设计得的任务是实现一个恰当的控制逻辑,使得FIFO可以被PCI接口芯片的DMA控制器访问。在现有的PCI接口芯片里面,AMCC5933直接提供了FIFO接口,实现数据流采集的控制逻辑最为简单。PLX等公司的PCI接口芯片则没有提供特定的引脚来提供外部FIFO访问能力,需要一个专门的接口逻辑来进行逻辑转换。下面的例子是PLX9054与FIFO的接口逻辑连接图,可以帮助理解这种系统的设计。
选择AMCC5933的原因是因为它价格便宜,型号众多,可以根据不同的需求选择适当的型号,比较灵活,而且提供了SDK帮助工发Windows下的驱动程序。但是FIFO的接口逻辑部分添加了一定的工作量,不如AMCC5933来得简便易用。设计者应该根据自己具体项目的要求来选择。
高速率的数据采集系统在采集数据流时最常见的问题是数据丢失,采集后数据流不完整。为了在系统调试中检验这个问题,在系统设计时加入一个自校正码源,使各系统自检功能。
在系统中,为了验证多大的缓存可保证数据流的连续采集,让数据源发送端发送自增长的测试码流。经过反复测试表明,在接收一个连续的数据流时,10Kbytes左右大小的FIFO缓存可以稳定不丢失地采集10Mbytes/s左右的数据流。但是为了整个计算机系统的稳定性考虑,建议在可能的情况下尽量用大的缓存。当然,对于数据的实时分析要求较高的领域,太大的缓存会引入延时的问题,这时候就要求权衡使用了。
2.2 CPU主系统设计初始化程序包括并行口初始化,采样数据寄存地址指针初始化,定时器初始化,开中断等环节。
(1)并行口初始化 在初始化时应规定PA0 -PA3为输出,并赋初值0000,使多路开关接通0通道,以便响应定时器中断时从0通道开始转换数据。另外,还应规定PB0为输入,以便CPU查询STS状态。
(2)采样数据寄存地址指针初始化。由数据采集系统得到的各通道采样值的转换结果应存放在一个规定的RAM区,通常叫循环寄存区。因为数据是源源不断输入的,而寄存器有限,故只能不断刷新旧数据而循环使用,但为了有一定的记忆能力,循环寄存区应有一定的存储容量。为了使CPU能随时知道下一数据该放在什么地址,在初始化时把循环寄存区的首地址存入指针。CPU在每次取得转换结果后,总是把它存入指针所指向的地址,然后更新指针内容指向下一地址。指针内容的更新在一般情况下是加2,因为每一次12位转换结果要占两个字节,但要检查一下更新结果是否超出循环区的末地址,如超出则应重新回到首地址以保证循环使用。
(3)定时器初始化,一般定时器都是可编程的。这里对定时器初始化就是根据设计要求规定采样脉冲的周期等。
(4)开中断。刚通电时,一般都由硬件屏蔽中断。因此在完成数据采集系统初始化后,应由软件解除中断屏蔽。
CPU执行完初始化程序之后,一般接着执行主程序,但在定时器发出采样脉冲请求中断后,CPU应响应中断,若数据预处理后未发现电力系统故障,则从中断返回,继续执行终端前的程序,同时准备再次响应中断。中断服务程序中的数据预处理部分,一般是保护的启动元件的程序段。
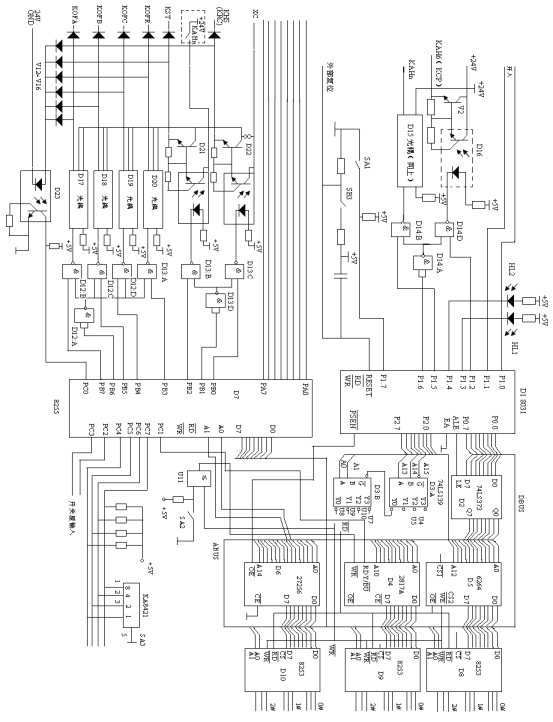
2.2.1 两路开出回路
D14为两端口与非门。输出端KAH6在CPU1、CPU2、CPU3中用于驱动巡检中断告警电器KAH6。在预期时间内某个CPU收不到巡检命令就驱动该继电器;CPU4的KAH6端用于驱动加速继电器KCP,以加速其他保护。正常情况下,8031的P1.2和P1.6均为低电平,要驱动巡检中断继电器KAH6或加速继电器KCP时,由软件使P1.2置1,P1.6仍为低电平,光耦D16导通,驱动三极管V2,正24V电源通过V2加于告警插件的KAH6继电器或逻辑插件的继电器KCP上,前者发巡检中断信号,后者发后加速脉冲。
2.2.2 六路开出回路
由8255PB口驱动的6路开出回路中的5路分别用于驱动三个分相出口继电器KOFA、KPFB、KSH、KOFC、永跳继电器KOFC和启动继电器KST,另一
路对高频保护用于控制收发信机停信或发允许信号;对综合重合闸用于合闸出口,对距离保护和零序保护则用作备用。
三个分相出口继电器中任两个动作将驱动三跳继电器KOFQ及三跳重动继电器3KOS,KOFQ的出点外引,用于驱动操作继电器箱中的TJQ,作为分相出口继电器拒动后备跳闸回路。因此,当相间故障而分相出口拒动时,可通过TJQ不带延时地实现三跳。
2.2.3 CPU的开入量本插件的开入量最多可达14个,分别由8255的PA口PC口的PC2、PC3及8031的P1.0、P1.1、P3.2、P3.3驱动。这些开关量均为经过8号及9号插件中的光耦输入。
2.3 开关量输入/输出回路设计2.3.1 开关量输入回路开关量输入大多数是触电状态的输入,可以分为两类:
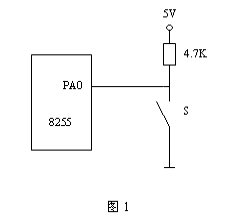
1)、安装在装置面板上的触点,例如各种工作方式开关,调试装置或运行中定期检查装置用的键盘触点,复位按钮及其他按钮等。
这类触点,与外界电路无联系,可直接接至微机的并行接口,也可以直接与CPU口线连接。在初始化时规定图中可编程并行口的PA0为输入口,CPU可以通过软件查询,随时知道外部触点S的状态。当S未被按下时,通过上拉电阻使PA0输入电压为5V,S按下时,PA0输入电压为0V。因此CPU通过查询PA0的输入电压,就可以判断S是处于断开还是闭合状态。
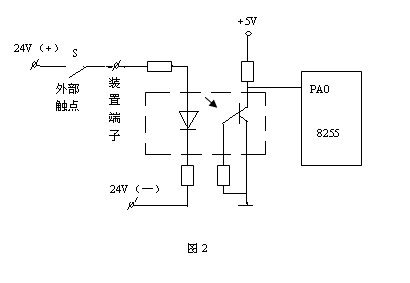
2)、从装置外部经过端子排引入装置的触点,例如需要由运行人员不打开装置外盖而在运行中切换的各种压板,转换开关以及其他保护装置和操作继电器的触点等。
这类触点由于与外电路有联系,不能象图1那样接入,而需经光耦器件进行隔离,以防触点输入回路引入的干扰,其原理接线如图2所示。图中虚线框内是光耦元件,集成在一个芯片内。当外部触点S接通时,有电流通过光耦器件的发光二极管使光敏三极管受激发而导通,三极管集电极电位呈低电位。S打开时,光敏三极管截至,集电极输出高电平。因此三极管集电极的电位即PA0口线的电位变化,就代表了外部触点的通断情况。这种电路使可能带有电磁干扰的外部接线回路和微机电路之间,只有光的耦合而无电的联系,因此可大大消弱干扰。
对于某些外部触点,如果在其通断变化后后须立即到处理,用软件查询方式会带来延时,这时可以将光敏三极管的集电极直接接CPU的中断请求端子。
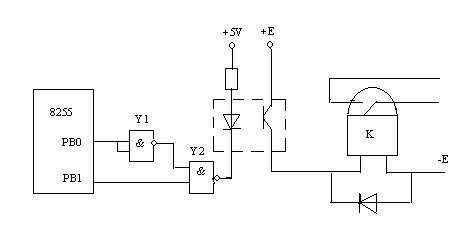
2.3.2 开关量输出回路 开关量输入主要包括保护的跳闸出口、合闸出口以及本地和中央信号等。一般都采用并行接口来控制有触点继电器的方法。为提高抗干扰能力,也要经过光电隔离,如图所示。只要由软件使并行口的PB0输出“0”,PB1输出“1”,便可使与非门Y2输出低电平,发光二极管导通,光敏三极管激发导通,使继电器K动作,其触点闭合,启动后级电路。在初始化和需要继电器返回时,应使PB0输出“1”,PB1输出“0”。
这里经与非门Y1及与非门Y2输出,而不是将发光二极管直接同并行口相连,一方面是为了增强并行口的带负荷能力,另一方面是在采用了与非门后,要满足两个条件才能使K动作,从而增加了抗干扰能力。
PB0经一反相器,而PB1却不经反相器,这样可防止在拉和直流的过程中继电器K的短时误动。因为在拉和直流的过程中,当5V电源处在中间某一临界电压时,可能由于逻辑电路的工作紊乱而造成保护动作,特别是保护装置的电源往往接有大量的电容器,所以拉和直流电源时,无论是5V电源还是驱动继电器K用的电源E,都可能缓慢上升或下降,从而完全可能来得及使继电器K的触点短时闭合,由于两个相反条件的互相制约,可以可靠的防止误动作。
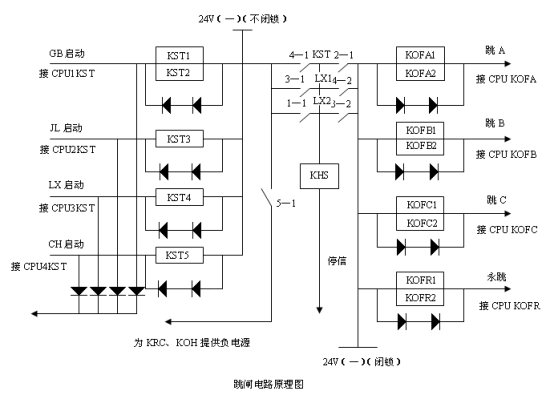
2.4 跳闸出口电路及逻辑等电路设计 启动继电器动作后启动发信,同时兼作总开放继电器,由其常开触点对跳闸回路及停信继电器24V电源的负极实现闭锁。为防止CPU插件出现故障而误动,启动回路采用相互闭锁方式,三个保护用的CPU分别驱动各自的启动继电器KST,KST的触点接成三取二闭锁方式,只有当CP1、CPU2、CPU3中至少有两个同时启动时,才能开放跳闸回路。综合重合装置的启动元件KTS作为重合闸回路的总闭锁。CPU4的KTS动作后,为重合闸继电器KRC和重合闸信号继电器KOH提供负电源,这样当线路轻载偷跳单相时,虽各保护的KTS不动作,但亦能保证重合闸回路可靠工作。
2.4.1 跳闸出口电路当CPU1-CPU2中有一退出工作时,为了三取二闭锁方式不影响未退出保护动作出口的可靠性,可以采用下面两种措施:
- 通过连线LX1、LX2解除三取二闭锁;
- 保护无故障停用时,可仍使该插件运行,其启动元件仍然工作,只
是将该保护的出口压板退出,这样三取二闭锁方式不会影响装置的正常工作。
停信继电器由CPU1的KST驱动。采用闭锁方式时,用于控制停信;采用允许方式时,用于控制发信机发允许信号。
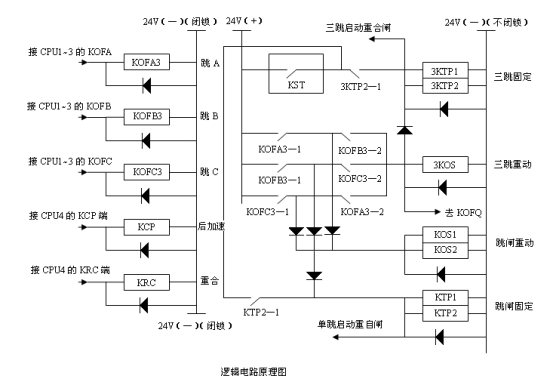
2.4.2 逻辑电路逻辑电路的原理图如下图,它主要由以下继电器构成:
跳闸重动继电器KOS。它在三个分相出口继电器中任一个动作时动作。
三跳闸动继电器3KOS。它在三个分相出口继电器中任两个同时动作时动作。
KOS及3KOS在分相出口继电器返还时返还。
跳闸固定继电器KTP。在三个分相出口继电器中任一个动作时动作,并一直保持到KTS返还时解除自保持。
三跳固定继电器3KTP。在三个分相出口继电器中任两个同时动作时动作,并保持到整组复归。
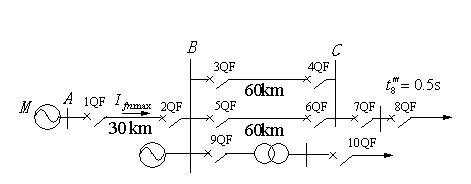
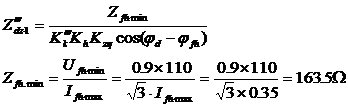
第3章 110KV线路微机距离保护相关计算3.1 三段相间距离保护参数计算及动作值整定
断路器1QF处距离保护的整定计算
为配合方便,先求出1、3、4QF断路器处保护第 段的整定值,即
段的整定值,即



断路器1、3、4QF处距离保护第 段的动作时间和灵敏度分别为:
段的动作时间和灵敏度分别为:


断路器1QF处距离保护第Ⅱ段的整定计算。
1QF处保护的相邻元件为BC线和并联运行的变压器T。当1QF处距离保护第 段与BC线第段配合时,有
段与BC线第段配合时,有

而

故

和变压器配合时,因为 ,应装纵差保护,
,应装纵差保护,
故变压器第 段保护范围应至低压母线E上,
段保护范围应至低压母线E上,


式中, (考虑两台变压器并列运行),
(考虑两台变压器并列运行),  。
。
选 为整定值。距离保护第Ⅱ段的动作时间为:
为整定值。距离保护第Ⅱ段的动作时间为:

第 段保护的灵敏度为:
段保护的灵敏度为:
满足灵敏度要求。
断路器1QF处距离保护第Ⅲ段的整定计算。
因为采用方向阻抗元件,故距离保护第Ⅲ段的整定值应按以下条件整定。

 ,即
,即 而
而
故
按与相邻距离保护第Ⅲ段动作时间配合,第Ⅲ段距离保护的动作时间为:

第二,与相邻线距离保护第Ⅱ段配合,即
 ,
,




应取 为相间距离保护第Ⅲ段的整定值。
为相间距离保护第Ⅲ段的整定值。
按与相邻距离保护第Ⅱ段配合,第Ⅲ段距离保护的动作时间为:
式中, ——相邻线路重合后不经振荡闭锁的距离保护第Ⅱ段的动作时间。
——相邻线路重合后不经振荡闭锁的距离保护第Ⅱ段的动作时间。
取第Ⅲ段的动作时间为: 
进行距离保护第Ⅲ段的灵敏度校验:
当作为近后备时, 

可见,作为近后备保护时,可满足灵敏度要求,作为BC线远后备保护时,却不满足灵敏度要求,作为变压器的远后备保护时,更不满足灵敏度要求,故应考虑取
 为整定值,这时灵敏度得到提高,为1.17,接近满足要求。
为整定值,这时灵敏度得到提高,为1.17,接近满足要求。
3.2 三段接地距离保护参数计算及动作值整定
动作阻抗
对输电线路,按躲过本线路末端短路来整定,即取
动作时限

秒。
距离保护第二段
1.动作阻抗
(1)与下一线路的第一段保护范围配合,并用分支系数考虑助增及外汲电流对测量阻抗的影响,即
式中为分支系数
与相邻变压器的快速保护相配合
取(1)、(2)计算结果中的小者作为
动作时限
保护第Ⅱ段的动作时限,应比下一线路保护第Ⅰ段的动作时限大一个时限阶段,即
灵敏度校验
如灵敏度不能满足要求,可按照与下一线路保护第Ⅱ段相配合的原则选择动作阻抗,即
这时,第Ⅱ段的动作时限应比下一线路第Ⅱ段的动作时限大一个时限阶段,即
距离保护的第三段
动作阻抗
按躲开最小负荷阻抗来选择,若第Ⅲ段采用全阻抗继电器,其动作阻抗为
式中
动作时限
保护第Ⅲ段的动作时限较相邻与之配合的元件保护的动作时限大一个时限阶段,即
灵敏度校验
作近后备保护时
作远后备保护时
式中,Kfz为分支系数,取最大可能值。
方向阻抗继电器的动作阻抗的整定原则与全阻抗继电器相同。考虑到正常运行时,负荷阻抗的阻抗角

较小,而短路时,架空线路短路阻抗角

较大。如果选取方向阻抗继电器的最大灵敏角

,则方向阻抗继电器的动作阻抗为
阻抗继电器的整定
保护二次侧动作阻抗

式中
——接线系数
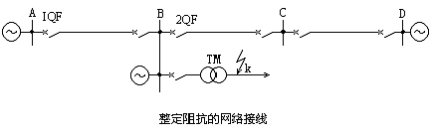
对距离保护的评价
各线路均装有距离保护,试对其中保护1的相间短路保护Ⅰ、Ⅱ、Ⅲ段进行整定计算。已知线路
AB的最大负荷电流

A,功率因数,
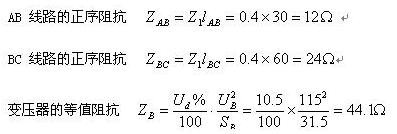
各线路每公里阻抗

/km,阻抗角

,电动机的自起动系数

,正常时母线最低工作电压

取等于

kV

。
距离Ⅰ段的整定
动作阻抗:

动作时间:

s
距离Ⅱ段
动作阻抗:按下列两个条件选择。
与相邻线路BC的保护3(或保护5)的Ⅰ段配合
于是
按躲开相邻变压器低压侧出口

点短路整定
此处分支系数

为在相邻变压器出口

点短路时对保护1的最小分支系数,
取以上两个计算值中较小者为Ⅱ段定值,即取

动作时间
距离Ⅲ段
动作阻抗

取于是

动作时间 :

取其中较长者 s
灵敏性校验
1)本线路末端短路时的灵敏系数
相邻元件末端短路时的灵敏系数
①相邻线路末端短路时的灵敏系数为
式中,

为相邻线路
BC末端

点短路时对保护1而言的最大分支系数,其计算等值电路如图3-54所示。
相邻变压器低压侧出口

点短路时的灵敏系数中,最大分支系数为
第4章 110KV线路微机距离保护流程图4.1 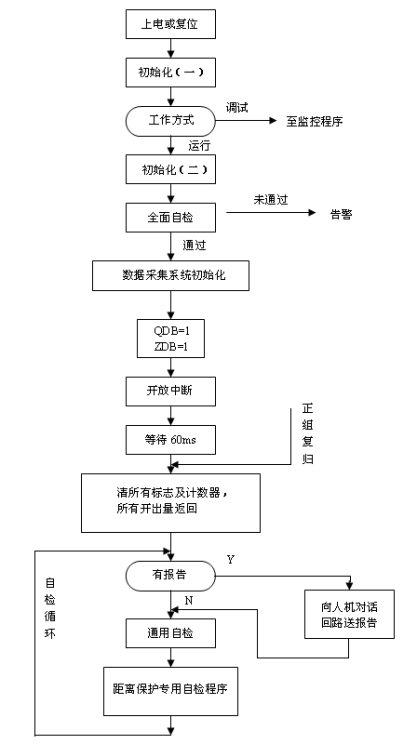 主程序流程图
主程序流程图
4.2 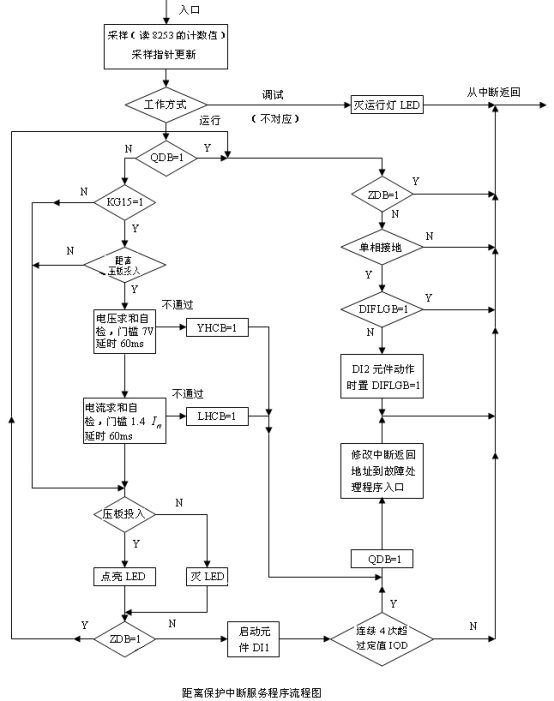 中断服务程序流程图
中断服务程序流程图
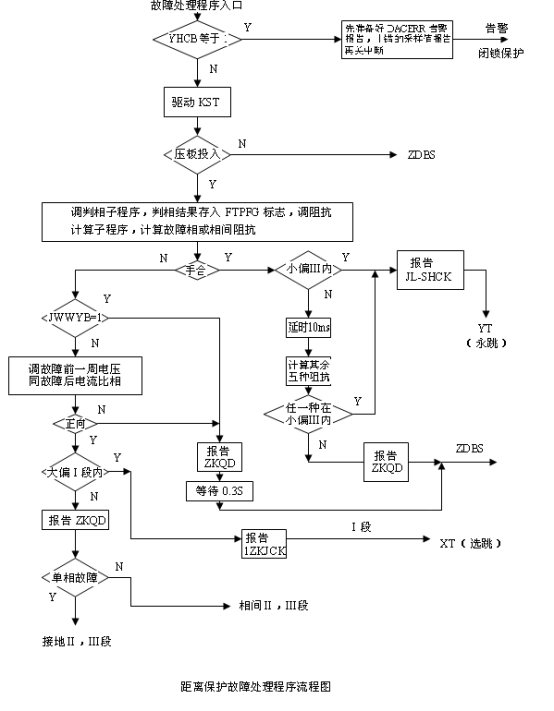
4.3 故障处理程序流程图
第5章 总结
110KV线路微机距离保护设计这个毕业设计主要综合运用微机技术实现输电线路距离保护。微机距离保护是输电线路微机继电保护装置的一个组成部分。距离保护是根据保护安装处的测量阻抗的大小,判断输电线路是否发生故障,以及故障点是否在保护区内,从而决定保护是否动作及动作延时的大小。距离保护克服了电流电压保护受系统运行方式影响大的缺点,具有较好的保护性能。按指定分区实时地检测各种故障和不正常运行状态,快速及时地采取故障隔离或告警等措施,以求最大限度地维持系统的稳定、保持供电的连续性、保障人身的安全、防止或减轻设备的损坏。可以实现常规保护很难办到的自动纠错,即自动地识别和排除干扰,防止由于干扰而造成误动作,具有自诊断能力,能够自动检测出计算机本身硬件的异常部分,配合多重化可以有效地防止拒动,因此可靠性很高。
通过对数据采集系统、CPU主系统、开关量输入/输出回路、跳闸出口电路及逻辑等电路的设计使110KV线路微机距离保护建立一个完整的系统,这个系统对整个110KV输电线路具有监测和保护的功能。对三段相间距离保护参数进行了计算及动作值整定和三段接地距离保护参数计算及动作值整定。编写了距离保护的主程序、距离保护中断服务程序设计、距离保护故障处理程序设计。画出了各部分程序的流程图。通过系统的设计、相关计算和程序的设计使整个系统有机的联合起来,实现了对110KV输电线路的保护。
参考文献
1尹项根等,电力系统继电保护原理与应用(上册),武汉:华中科技大学出版社,2001.5
2谷水清,微机型线路保护原理及装置,沈阳:辽宁大学出版社,1999.12
3张明君等,电力系统微机保护,北京:冶金工业出版社,2002.3
4罗士萍,微机保护实现原理及装置,北京:中国电力出版社,2001.8
5许建安,电力系统微机继电保护,北京:中国水利水电出版社,2001.8
6张志竟,黄玉铮编,电力系统继电保护原理与运行分析(上册),北京:中国电力出版社,1995
7王广延,吕继绍编,电力系统继电保护原理与运行分析(下册),北京:中国电力出版社,1995
8许振亚编,电力系统继电保护,北京:中国电力出版社,1996
9贺家李,宋从矩编,电力系统继电保护原理,第三版,北京:中国电力出版社,1994
10王维俭编,电力系统继电保护基本原理,北京:清华大学出版社,1991
11杨奇逊主编,微机型继电保护基础,北京:水利电力出版社,1988
12陈德树主编,计算机继电保护原理与技术,北京:水利电力出版社,1992
13 Blackburn J L,et al. Applied Protective Relaying:2nd Edition . Coral Springs:Westinghouse Electric Corporation (Relay-Instrument Division),1982
14 Workgroup of GEC ALTHOM Measurements. Protective Relays-Application Guide:
3rd Edition . Stafford:GEC ALTHOM Protection & Control Limited,1987
15 Sachdev M S, et al. IEEE Tutorial Course – Microprocessor Relays and Protection Systems. New York:The Institute of Electrical and Electronices Engineering,Inc. ,1987
致 谢
110KV线路微机距离保护设计是在老师精心指导下完成的,在系统的设计过程中,老师除了每周二与周五指导我们外,还抽出了大量的业余时间为我们解答疑点。在此我衷心的表示感谢。
在进行毕业设计的过程中,老师要求我们要自主完成,发挥四年所学的知识,并通过阅读和查找资料完善设计。在此也感谢电气教研组其它老师和一些同学热心的帮助。
附 录1
The SEL-321 interaction is away from the protection static characteristic and the dynamic characteristic and the testing method
Schweitzer the engineering laboratory (SEL) microcomputer line protection has used the belt compensation negative sequence impedance directional element. In negative sequence impedance plane, when has the asymmetric failure, if actual surveys negative sequence impedance Z2=U2/I2 (in the formula U2, I2 respectively be inputs relay's breakdown voltage, electric current negative sequence component) the spot falls in z2=Z2Fb (in the formula z2 is survey negative sequence impedance in line negative sequence anti-angle direction projection, Z2Fb is forward movement threshold value which SEL relay basis different Z2 calculates) when the curve breast (z2≤Z2Fb) distinction for the direction breakdown, falls, in z2=Z2Rb (in the formula Z2Rb is backward action threshold value which SEL relay basis different Z2 calculates) when the curve upper side (z2≥Z2Rb) distinction for reversed direction breakdown. This kind of negative sequence directional element's installation value and movement characteristic and equipment movement actual system negative sequence impedance related, therefore when to uses this kind of negative sequence directional element's protection carries on the relay examination, the experiment, should pay attention to the testing method, if with the examination tradition relay's testing method, will possibly meet some questions.
1) Interaction is away from protection static state movement characteristic testing method the SEL-321 microcomputer line protection, has the interaction and the touchdown distance protection, the direction overflow protection and the fault location function, in view of not the balanced breakdown, its directional element has used the belt compensation negative sequence directional element. Its interaction from the protection direction impedance part and the negative sequence directional element is unifies in together, therefore, when carries on the test to this protection part characteristic, cannot use the test general direction impedance protection feature method, but must pay attention to experimental the electric current, the voltage peak-to-peak value and the phase, if is too far with the protective device in the reality system failure's time situation difference, possibly creates from the part started, but as a result of has the specific installation value negative sequence directional element starting not to cause the protection to be unable the movement situation.
The testing instrument uses OMICRON the CMC-156 relay protection reflectoscope reflector, CMC-156 provides in the impedance plane to is away from the protection test 2 essential methods: One kind is the constant current law, another kind is the constant source mesh method. to alternates with is away from the protection direction impedance circle part characteristic test, generally may use the constant current law. For example simulates the L2-L3 phase fault, carries on the impedance circle boundary search (to be equal to makes movement value examination in impedance circle boundary vicinity every other certain angle). Before this kind of test method artificial line breakdown, is the light condition, the failure test short-circuit current size certain (interphase current is tests electric current Itest:|IL2|=|IL3|=Itest), breakdown voltage (L2, L3 voltage between phases UL2-L3) the phase maintains for - 90° (take L1 the phase voltage UL1 phase as 0°), the L2, L3 interphase current's phase ∠IL2,∠IL3 Theta decided by the breakdown impedance Zf impedance angle, ∠IL2=-90°-θ,∠IL3=90°+θ; The breakdown voltage UL2-L3 size determined by the short-circuit impedance Zf size: |UL2-L3|=2.Itest|Zf|.
With constant current law fixed Itest=3.0 A, to the SEL-321 interaction the result which obtains from the protection direction impedance characteristic test is: When short-circuit impedance impedance angle in impedance circle most greatly keen angle (line impedance angle? L) neighbor when protects the movement to be normal, makes the movement impedance circle the boundary, ideal movement impedance circle is good with Figure 2 tallies; But works as the short-circuit impedance the impedance angle deviation most greatly keen angle region, protects the movement situation with the anticipated symbol, the impedance circle boundary is not unable to make. If the example the short-circuit impedance Zf=2.35∠40° OMEGA, the short dot should in the 3rd section of impedance circle, but the interaction protection does not act, even when Zf=0.2∠10° OMEGA protects does not act.
2) The impedance characteristic which the interaction uses the constant current from protection dynamic movement characteristic testing method the testing method not to be able to examine SEL-321LIANG when phase fault as shown in Figure 2. But CMC-156 has provided in the impedance plane another kind of basic test method - - constant source mesh method, may simulate some specific source impedance automatically (by trier hypothesis) in the situation when the different short-circuit impedance protects installs the electric current which and the voltage the quarter feels, the corresponding size and the phase obtained according to the source impedance and the breakdown impedance computation, had guaranteed the protection tested ZS and the systems operation situation match case, might in satisfy under like the negative sequence directional element's movement condition, carried on the test in view of the protection impedance movement characteristic, also in closer protection actual movement situation.
3)The different testing method with the protection static state movement characteristic and dynamic movement characteristic relations under the memory voltage's function, the direction impedance circle part to the breakdown response movement is the dynamic movement characteristic, only then maintains at the line fault the long time, after the remembering voltage stall, the direction impedance circle part to the breakdown response only then becomes the static movement characteristic. But has the initial period in the breakdown, the direction impedance circle part to the breakdown response is the dynamic movement characteristic. Then, why is away from the protection to the traditional protection's interaction the MHO direction impedance circle part characteristic, uses the constant current law to carry on the test to be possible to obtain the static characteristic? In fact, if SEL-321 does not have the negative sequence directional element's influence (negative sequence directional element definite value to be appropriate, negative sequence directional element may act when), may also use the constant current law to test to two phase faults time the static characteristic.
The constant current law obtains the static characteristic and protection itself acts what relations does the dynamic characteristic also have? As mentioned above, when constant current law simulation test, simulates certainly L2-L3 the phase fault, the failure test short-circuit current size certainly (|IL2|=|IL3|=Itest), the breakdown voltage (UL2-L3) phase maintains - 90° (take L1 the phase voltage UL1 phase as reference phase 0°), but before the breakdown, is the light condition, UL2-L3 phase for - 90°, i.e., after remembering voltage U|0| and breakdown, voltage U is with the phase, the static characteristic movement area 90°
Because when the memory voltage has an effect, the direction impedance circle part to the breakdown movement reflection is the dynamic characteristic, then obtains with the constant current law test in the static characteristic movement boundary any spot, is in the protection 1 dynamic characteristic movement boundary spot surely. For example uses the constant current law to fore-mentioned SEL-321|IL2|=|IL3|=Itest=3.0 A simulates the L2-L3 phase fault, tests the 3rd section of protection in the breakdown impedance angle for 40° the direction in movement boundary for Zf=2.42∠40°. From the test electric current, the voltage computation may result, this time ZS=14.317∠40°. In the impedance plane, and - the ZS segment circumscribes (as shown in Figure take Zzd3 as the diameter 5), because Zf is take zero point O and the Zzd3 segment as in the diameter circle spot, may know by the geometry theorem ∠OZfZzd3=90°, then has ∠ZSZfZzd3=90°, may also know Zf by the geometry theorem to be take - ZS and the Zzd3 segment as in the diameter circle spot. Therefore, the constant flow law makes the static characteristic movement boundary essence is changes the dynamic movement characteristic which the source impedance impedance makes in the corresponding source impedance angle direction boundary point set.
4)Conclusion
a) SEL the belt compensation's negative sequence directional element's installation parameter and the system impedance parameter have the close relation, therefore, when carries on the interaction is away from the protection test, the input current, the voltage size and the phase, should be in some system impedance (including source impedance, line impedance, breakdown impedance) in the situation produce, like this can guarantee that directional element's movement does not affect is away from the protection part. b) regarding has the memory polarizing voltage distance protection, uses OMICRON the CMC-156 relay protection reflectoscope reflector (or other has same function protection reflectoscope reflector), can only test with constant current's method test method is away from the protection the static movement characteristic, with the constant source mesh method's test method, may test is away from protects to not the balanced breakdown dynamic movement characteristic. c) not the balanced breakdown's constant current's method test obtains the distance protection static characteristic movement boundary, its essence is changes the source impedance obtained dynamic characteristic in the experimental source impedance impedance angle direction boundary point set.
SEL-321相间距离保护静态特性与动态特性及试验方法 Schweitzer工程试验室(SEL)的微机线路保护采用了带补偿的负序阻抗方向元件。在负序阻抗平面上,当发生不对称故障时,若实际测量负序阻抗Z2=U2/I2(式中U2,I2分别为输入继电器的故障电压、电流的负序分量)的点落在z2=Z2Fb(式中z2为测量负序阻抗在线路负序抗角方向的投影,Z2Fb为SEL继电器根据不同Z2计算出的正向动作阈值)曲线下侧时(z2≤Z2Fb)判别为正方向故障,落在z2=Z2Rb(式中Z2Rb为SEL继电器根据不同Z2计算出的反向动作阈值)曲线上侧时判别为反方向故障。这种负序方向元件的整定值和动作特性与装置运行的实际系统负序阻抗有关,因此在对采用这种负序方向元件的保护进行继电器检验、试验时,应注意试验方法,如果用检验传统继电器的试验方法,很可能会遇到一些问题。
1 相间距离保护静态动作特性的试验方法
SEL-321微机线路保护,具有相间及接地距离保护、方向过流保护和故障定位的功能,针对不平衡故障,它的方向元件采用了带补偿的负序方向元件。其相间距离保护的方向阻抗元件与负序方向元件是结合在一起的,因此,在对该保护元件特性进行测试时,不能用测试一般方向阻抗保护特性的方法,而必须注意试验的电流、电压的幅值和相位,若与保护装置所在实际系统故障时的情况相差太远,就可能造成距离元件已起动,但由于具有特定整定值的负序方向元件没有起动而使保护无法动作的情况。
试验仪器采用OMICRON的CMC-156继电保护测试仪,CMC-156提供在阻抗平面上对距离保护测试的2种基本方法:一种是恒定电流法,另一种是恒定源阻抗法。
对相间距离保护方向阻抗圆元件特性的测试,一般可采用恒定电流法。例如模拟L2-L3相间短路故障,进行阻抗圆边界搜索(相当于在阻抗圆边界附近每隔一定角度做动作值检验)。这种测试方法模拟线路故障前为空载状态,故障测试的短路电流大小一定(相电流均为测试电流Itest:|IL2|=|IL3|=Itest),故障电压(L2,L3相间电压UL2-L3)的相位保持为-90°(以L1相电压UL1相位为0°),L2,L3相电流的相位∠IL2,∠IL3由故障阻抗Zf的阻抗角θ决定,∠IL2=-90°-θ,∠IL3=90°+θ;故障电压UL2-L3的大小由短路阻抗Zf的大小确定:|UL2-L3|=2.Itest|Zf|。
用恒定电流法固定Itest=3.0 A,对SEL-321相间距离保护方向阻抗特性测试得到的结果是:当短路阻抗的阻抗角在阻抗圆最大灵敏角(线路阻抗角L)附近时保护动作正常,作出动作阻抗圆的边界,与图2的理想动作阻抗圆较好吻合;但当短路阻抗的阻抗角偏离最大灵敏角区域时,保护动作情况则与预期的不符,阻抗圆边界根本无法作出。例如若短路阻抗Zf=2.35∠40° Ω,短路点应在第3段阻抗圆内,但相间保护不动作,甚至在Zf=0.2∠10° Ω时保护都不动作。
2 相间距离保护动态动作特性的试验方法
采用恒定电流的试验方法不能检测SEL-321两相相间短路时如图2所示的阻抗特性。而CMC-156提供了在阻抗平面上的另一种基本测试方法——恒定源阻抗法,可以自动模拟某一特定源阻抗(由试验者设定)情况下在不同短路阻抗时保护安装处所感受到的电流和电压,相应的大小和相位根据源阻抗和故障阻抗计算得到,保证了保护测试到的ZS与系统运行情况相符,这样可在满足负序方向元件的动作条件下,针对保护的阻抗动作特性进行测试,也更接近保护实际运行中的情况。
3 不同试验方法同保护静态动作特性和动态动作特性的关系
在记忆电压的作用下,方向阻抗圆元件对故障的反应动作是动态动作特性,只有在线路故障保持长时间,记忆电压失去作用后,方向阻抗圆元件对故障的反应才变为静态动作特性。而在故障发生初期,方向阻抗圆元件对故障的反应是动态动作特性。那么,为什么对传统保护的相间距离保护的MHO方向阻抗圆元件特性,采用恒定电流法进行测试可得到静态特性呢?实际上,如果SEL-321没有负序方向元件的影响(负序方向元件定值合适,负序方向元件可动作时),也可采用恒定电流法测试到两相间短路时的静态特性。
恒定电流法所测得的静态特性和保护的本身动作的动态特性又有什么关系呢?如前所述,恒定电流法模拟测试时,模拟L2-L3相间短路,故障测试的短路电流大小一定(|IL2|=|IL3|=Itest),故障电压(UL2-L3)的相位保持-90°(以L1相电压UL1相位为参考相位0°),而故障前为空载状态,UL2-L3相位为-90°,也就是说,记忆电压U|0|与故障后电压U是同相位的,静态特性动作区90°<arg和动态特性动作区90°<arg(实际上是相同的。同样可知,由于用恒定源阻抗法模拟三相平衡短路故障时,故障前后各相电压的相位不会改变,因此用恒定源阻抗法的三相平衡故障测试方法测得的保护动作特性也是静态动作特性圆。
由于在记忆电压起作用时,方向阻抗圆元件对故障的动作反映是动态特性,那么用恒定电流法测试得到的静态特性的动作边界上任一点,必定是保护的1个动态特性的动作边界上的点。例如对前述SEL-321用恒定电流法|IL2|=|IL3|=Itest=3.0 A模拟L2-L3相间短路,测试得第3段保护在故障阻抗角为40°方向上的动作边界为Zf=2.42∠40°。从测试电流、电压计算可得,此时ZS=14.317∠40°。在阻抗平面上,以Zzd3和-ZS连线为直径作圆(如图5所示),因为Zf是以原点O和Zzd3连线为直径的圆上的点,由几何定理可知∠OZfZzd3=90°,那么有∠ZSZfZzd3=90°,又由几何定理可知Zf必是以-ZS和Zzd3连线为直径的圆上的点。因此,恒流法所作出的静态特性动作边界实质是改变源阻抗阻抗所作出的动态动作特性在相应源阻抗角方向上的边界点的集合。
4 结论
a)SEL带补偿的负序方向元件的整定参数与系统阻抗参数有密切关系,因此,在进行相间距离保护测试时,输入电流、电压的大小和相位,应是在某一系统阻抗(包括源阻抗,线路阻抗,故障阻抗)情况下产生的,这样才能保证方向元件的动作不影响距离保护元件。
b)对于具有记忆极化电压的距离保护,采用OMICRON的CMC-156继电保护测试仪(或其它具有相同功能的保护测试仪),用恒定电流法的测试方法只能测试距离保护的静态动作特性,用恒定源阻抗法的测试方法,可以测试得距离保护对不平衡故障的动态动作特性。
c)不平衡故障的恒定电流法的测试得到的距离保护静态特性动作边界,其实质是改变源阻抗所得的动态特性在试验源阻抗阻抗角方向上的边界点的集合。
本翻译资料来自
Blackburn J L,et al. Applied Protective Relaying:2nd Edition . Coral Springs:Westinghouse Electric Corporation (Relay-Instrument Division),1982
单片机源程序如下:



















 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

