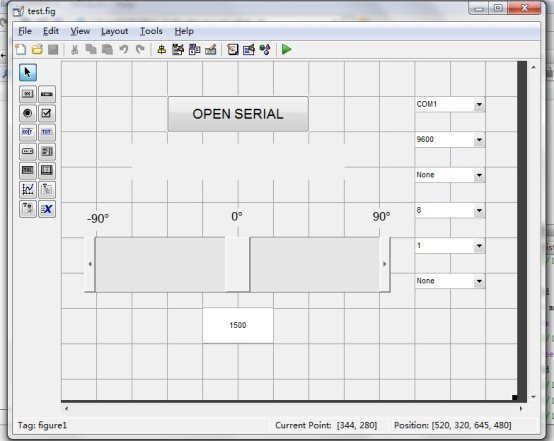
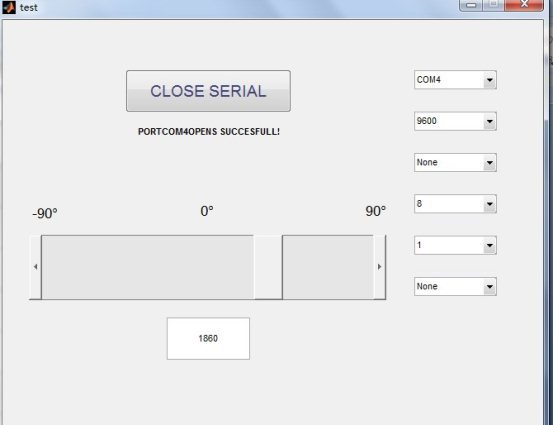
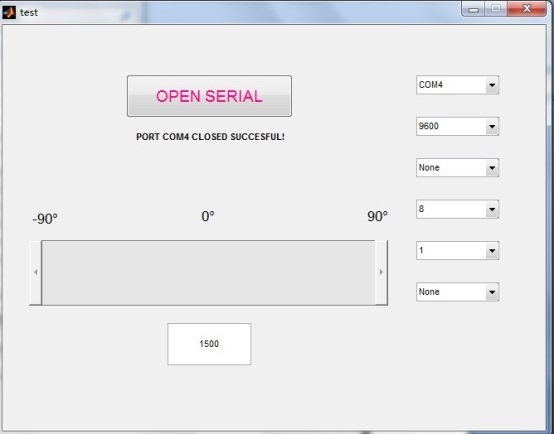
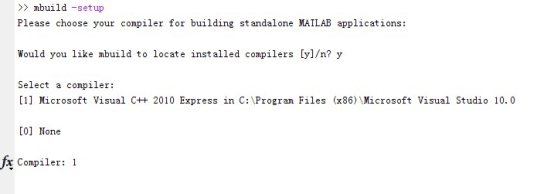
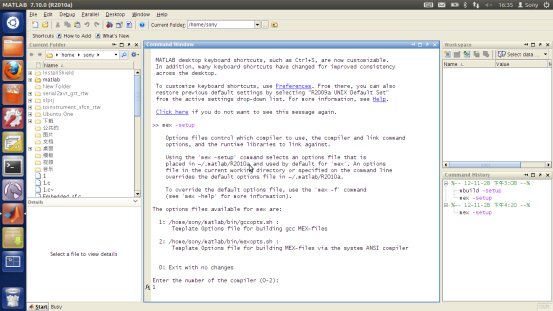
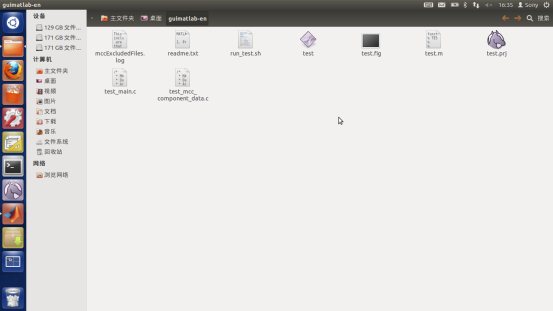
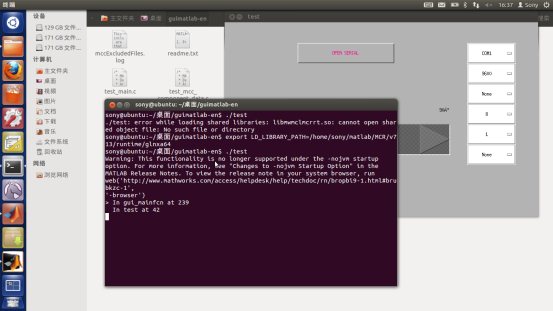
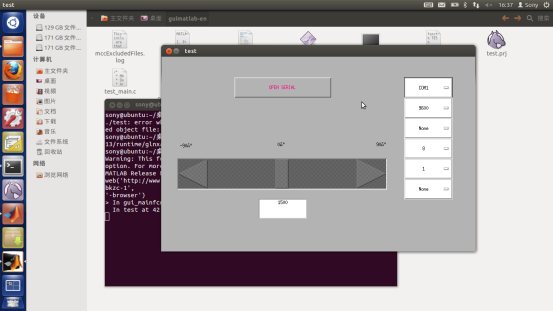
运用Matlab GUI制作跨平台串口控制界面 首先在matlab中制作所需要的界面,由于实际需要,我设置了一些串口属性设置的下拉菜单,一个打开/关闭串口的开关按钮,一个用于控制的滑块(slider)组建,以及一些显示信息的文本框。 界面如上图所示。 在程序编写时有一些注意事项: 1、当串口还没有打开时,拖动slider发送数据会产生错误,为了避免这种情况,我将slider的初始enable设置为off,即刚开始滑块是不可用的,只有打开串口之后才激活,关闭串口又自动设置为不可用。 2、在关闭程序之后如果没有关闭串口并删除串口对象,在下次打开程序时就会提示串口已被占用,所以在程序中我添加了关闭程序时直接关闭并删除串口对象,以免出错。 运行结果如图: 将硬件平台连接好之后,进行试验,结果表明可以实现对舵机的实时控制。 接下来就要进行程序的移植工作,主要分为windows平台和linux平台。 Windows 平台 首先在matlab中设置编译器(compiler),通过mbuild –setup命令,会列出电脑上已安装的编译器,需要选择一个合适的, 在本人的win7x64系统上,有这个vc2010,就选择它了,成功之后会有提示,否则请安装正确适用的编译器,设置好编译器后,就可以进行编译。 要用到mcc命令,mcc –m test,test为我的fig和m文件名称,执行完之后会在当前目录生成可执行文件,这里就是test.exe文件,直接双击,首先出现一个dos黑窗口,这个是可以显示可能的出错信息或者正常运行信息,可以选择不出现这个窗口,数秒钟之后,就出现了脱离matlab的程序界面,与matlab中利用guide运行界面一样,但是实现了脱离matlab运行,控制效果也相差无几。 小结:这个生成的程序虽然实现了windows下脱离matlab运行,但是其实还需要一些特定的环境变量,在某些机器上要正常运行需要安装matlab目录下一个叫MCRINSTALLER.EXE的文件,安装之后,就可在windows系统中运行。 Linux平台 同样选择合适的编译器: 这里选择gcc编译器,同windows平台一样利用mcc命令进行编译,会生成可执行文件: 直接运行会发现提示没有所需要的库,无法运行,需要手动添加环境变量,添加之后就可以运行: 可以看到一些在windows下可以正常显示的字符在这里显示乱码,是因为linux的字库还不够全,我这是直接把windows下的fig和m文件拿过来用,就出现了这种问题,不过无伤大雅,只要在linux下的matlab中对有乱码的字符编辑一下,该删的删,该改的改,没什么大问题。 小结:在linux系统下,同样要设置添加环境变量,程序才能正常运行,同时由于同一端口的端口号在windows和linux下是不同的,需要在程序中进行更改。
完整的Word格式文档51黑下载地址:
 Matlab-GUI制作跨平台串口控制界面.doc
(849.5 KB, 下载次数: 10)
Matlab-GUI制作跨平台串口控制界面.doc
(849.5 KB, 下载次数: 10)
| 








 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

