红外线倒车雷达文档
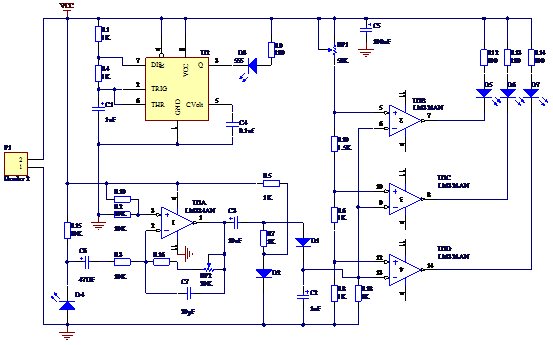
一.设计目标 1.了解红外线倒车雷达的工作原理。 2.学会识读红外线倒车雷达电路原理图、安装图。 3.掌握红外线倒车雷达电路安装及焊接。 4.掌握红外线倒车雷达测量和调试技能。 5.学会用Multisim软件仿真电路。 二.项目介绍 本红外线倒车雷达测距具有电路结构简单、成本低、电路工作稳定的特点,广泛应用于各种测距场合。红外线倒车雷达电路由多谐振荡器电路、红外线发射与接收电路、信号放大与电压比较电路和发光管显示电路组成。电路使用红外发射管和红外接收管作为传感器件,电路的核心元件包括NE555和运放LM324。NE555构成多谐振振荡电路发射红外波信号,LM324主要用来放大红外接收信号和构成电压比较器电路,发光二极管用来指示倒车距离范围。 三.电路原理简要分析 NE555及外围元件组成多谐振荡器电路,产生驱动红外线发射管工作的震荡电压,驱动发射管发射出红外线信号。红外线被物体反射回来后,由红外线接收管接收并送人LM324的第2脚进行放大,放大后的信号经U2的第一脚输出,经C3耦合、D1和C2整流滤波后送至U2的三个比较器的反相输入端,分别与三个比较器的同相输入端的电压进行比较,当反相输入端的电压高于同相输入端的电压时,该比较器输出低电平,使与其连接的发光二极管点亮。由发光二极管点亮的个数来指示距离的远近。 四.项目实施 1.红外线倒车雷达电路原理图 图1-1 电路原理图
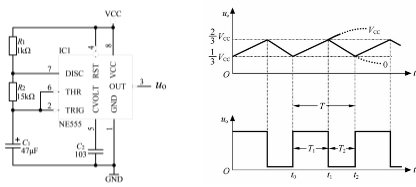
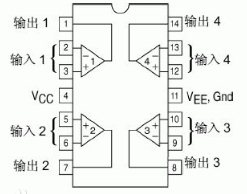
2.电路核心元件介绍 (1)红外发射和接收管 红外发射管也称红外线发射二极管,属于二极管类。它是可以将电能直接转换成近红外光(不可见光)并能辐射出去的发光器件,主要应用于各种光电开关及遥控发射电路中。红外线发射管的结构、原理与普通发光二极管相近,只是使用的半导体材料不同。红外发光二极管通常使用砷化镓(GaAs)、砷铝化镓(GaAlAs)等材料,采用全透明或浅蓝色、黑色的树脂封装。 红外接收管就是将光信号(不可见光)转换成电信号一般是接收、放大、解调一体头,红外信号经接收管解调后,数据 “0”和“1”的区别通常体现在高低电平的时间长短或信号周期上,单片机解码时,通常将接收头输出脚连接到单片机的外部中断,结合定时器判断外部中断间隔的时间从而获取数据。重点是找到数据“0”与“1”间的波形差别。 (2)集成电路NE555 555集成电路是一种模拟电路和数字电路相结合的中规模集成器件,它性能优良,适用范围很广,外部加接少量的阻容元件可以很方便地组成单稳态触发器和多谐振荡器,以及不需外接元件就可组成施密特触发器。因此555集成块被广泛应用于脉冲波形的产生与变换、测量与控制等方面。 图1-2 555集成电路引脚排列和实物图 (1)接地GND:地线,通常被连接到电路共同接地。 (2)触发TRIGGER:这个脚位是触发NE555使其启动它的时间周期。触发信号上缘电压须大于2/3 Vcc,下缘须低于1/3 Vcc 。 (3)输出OUTPUT:当时间周期开始555的输出输出脚位,移至比电源电压少1.7伏的高电位。周期的结束输出回到O伏左右的低电位。于高电位时的最大输出电流大约200mA 。 (4)重置RESET:一个低逻辑电位送至这个脚位时会重置定时器和使输出回到一个低电位,它通常被接到正电源或忽略不用。 (5)控制CONTROL VOLTAGE:这个接脚准许由外部电压改变触发和闸限电压。当计时器在振荡的运作方式下,这输入能用来改变或调整输出频率。 (6)重置锁定THRESHOLD:重置锁定并使输出呈低态。当这个接脚的电压从1/3Vcc电压以下移至2/3Vcc以上时启动这个动作。 (7)放电DISCHARGE:和主要的输出接脚有相同的电流输出能力,当输出为ON时为LOW,对地为低阻抗,当输出为OFF时为HIGH,对地为高阻抗。 (8)电源Vcc:这是555个计时器IC的正电源电压端。供应电压的范围是+4.5~+16。 555集成电路构成的多谐振荡器 ,电路的前半部分由555组成的多揩振荡器,具体电路图如图所示,为方便分析电路工作过程,图展示555集成块内部结构图。 图1-3 555多谐振荡电路 图1-4 多谐振荡波形图 用555定时器构成的多谐振荡器如图6-9-3所示,图6-9-4为工作波形图。图6-9-3首先将定时器2、6脚相接而构成施密特形式,再通过7脚接入R1、R2、C1充放电回路。充电回路为R1、R2、C,放电回路为C1、R2、放电管TD(集成块内部,充放电电压uc的阀值电平为2/3VCC和1/3VCC,在定时器的输出端3脚得到矩形波振荡周期为:T≈0.7(R1+2R2)C。 (3)集成运算放大器LM324 LM324系列器件带有差动输入的四运算放大器。与单电源应用场合的标准运算放大器相比,它们有一些显著优点。该四放大器可以工作在低到3.0伏或者高到32伏的电源下,静态电流为MC1741的静态电流的五分之一。共模输入范围包括负电源,因而消除了在许多应用场合中采用外部偏置元件的必要性。每一组运算放大器可用图1所示的符号来表示,它有5个引出脚,其中“+”、“-”为两个信号输入端,“V+”、“V-”为正、负电源端,“Vo”为输出端。两个信号输入端中,Vi-(-)为反相输入端,表示运放输出端Vo的信号与该输入端的相位相反;Vi+(+)为同相输入端,表示运放输出端Vo的信号与该输入端的相位相同。 LM324具有以下特点:短路保护输出;真差动输入级;可单电源工作:3V-32V;低偏置电流:最大100mA;每封装含四个运算放大器;具有内部补偿的功能;共模范围扩展到负电源。 图1-5 LM324内部结构图
3.元器件清单
4.电路安装要求 1)电路安装、元件焊接前,先认真分析原理图和元器件,找到相关元器件在电路板上一一对应的位置。 2)元件安装、焊接请遵照从小到大,从低到高的原则来进行。 3)电阻插装焊接,电阻元件较多,要区别不同阻值的电阻,不要相互混淆,色环朝向保持一致,紧贴电路板插装焊接。 4)有极性元件如电解电容,焊接前请先判断极性,确认无误后再焊接。 5)红外发射管、红外接收管在焊接前请先判断自身极性,确认无误后再焊接。 6)双列直插式集成块,先焊接底座,再安装集成块。 5.电路调试 (1).电路安装完成后,可用万用表检测电路是否连通,有无虚焊,检查电路安装无误后,接通9V电源,观察电路有无异样(如元件发热等)。如果正常,使用调试工具调整电路相关元件。 (2).Rp1调节反射距离,Rp2调节灵敏度,建议通过调节实现30cm时一盏灯亮,20cm时二盏灯亮,10cm时三盏灯亮。传感器上方用白纸遮挡,对红外波的反射效果最好。 (3).最终的效果是当传感器上方遮挡物不同距离时,显示的LED数量不同,距离越近时,发光二极管亮的越多,无遮挡物时则不亮,即模拟一简易倒车雷达电路。 6.红外线倒车雷达实物图 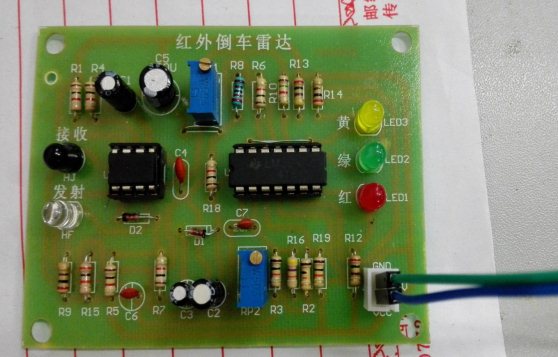
五.实验现象: 1. 一盏灯亮(30cm左右) 2. 两盏灯亮(20cm左右)
3. 三盏灯亮(10cm左右)
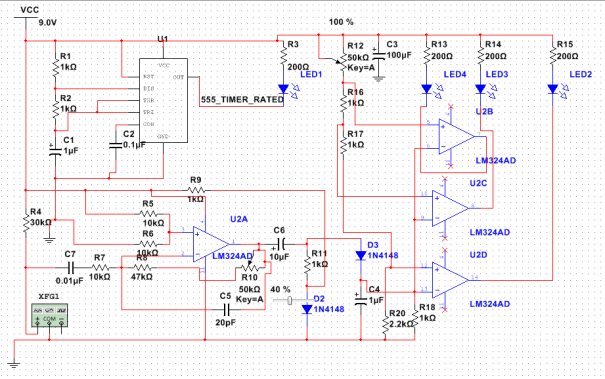
六.仿真及其结果 1.仿真电路图
一盏灯亮 两盏灯亮 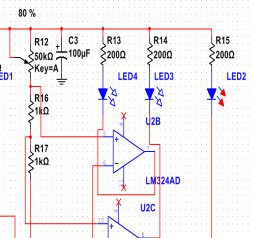 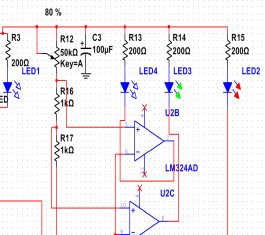
\
三盏灯亮 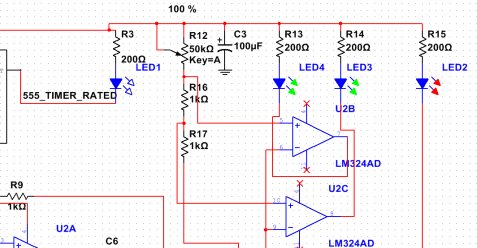
仿真结果分析:当调节信号发生器时,仿真结果为一盏led灯亮、两盏led灯亮、三盏led灯亮。直流电压通过多谐振荡器电路、红外线发射与接收电路、信号放大与电压比较电路和发光管显示电路,然后通过改变电位器的阻值来达到调节反射距离和灵敏度,使电路达到可以在一定范围内测量倒车距离范围,通过仿真结果可以看出设计的电路基本上是成功的,但是仍有误差存在,需要进一步的改进。 经过这次的课程设计我收获了很多,也学习到了很多有关专业方面的知识。学会了辨认元器件和基本的焊接元器件,通过调试达到了本课程设计的要求效果。最后我用Multisim软件对电路图进行了仿真,经过对电路的仿真我掌握了仿真的具体方法。虽然在这次实验调试的过程中也遇到了一些困难,但是通过查阅相关的资料,并且跟同学和老师的讨论中,基本上解决了所遇到的问题。
Word格式文档51黑下载地址:
 红外线倒车雷达.doc
(4.02 MB, 下载次数: 127)
红外线倒车雷达.doc
(4.02 MB, 下载次数: 127)
| 



 [复制链接]
[复制链接]








 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

