|
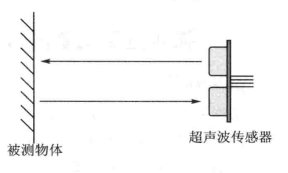
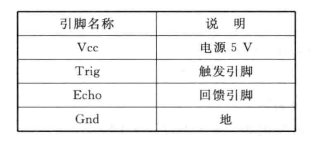
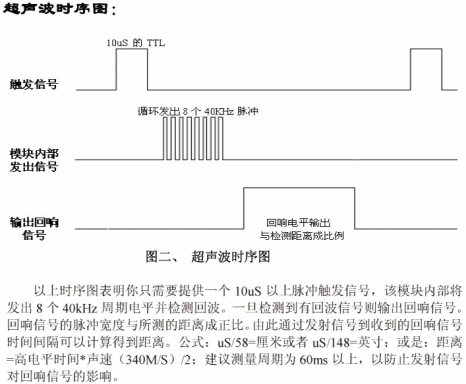
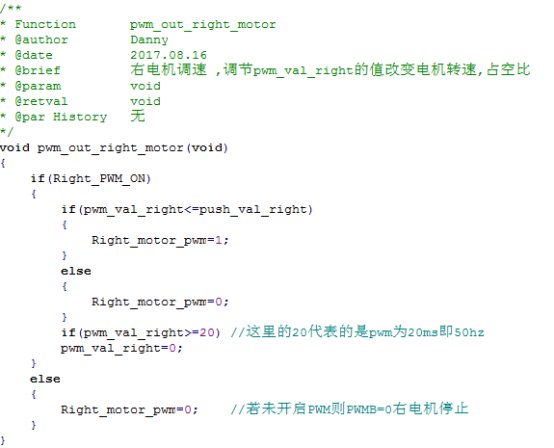
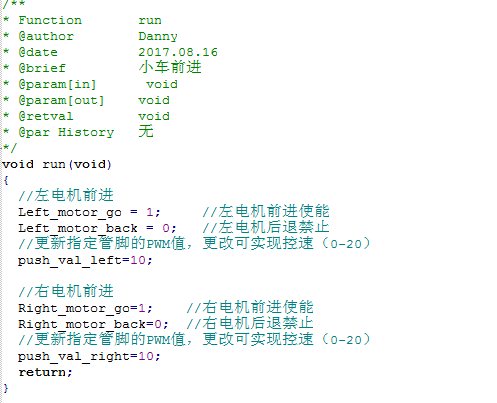
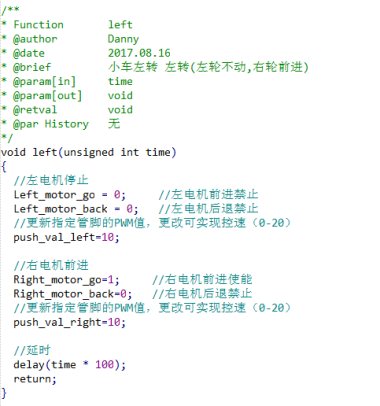
51单片机平台-------超声波避障实验 图1-1 51单片机主控板 图1-2 一体云台超声波模块 单片机上电之后,启动超声波避障功能,当前方有障碍物时小车则相应的转向避障。 SR04是利用超声波特性检测距离的传感器。其带有两个超声波探头,分别用作发射和接收超声波。其测量的范围是3-500cm。 图3-1 超声波发射和接收示意图 图3-2 SR04超声波模块引脚 该模块的工作原理: 先使用单片机的P3.7引脚向TRIG脚输入至少10us的高电平信号,触发模块的测距功能。如下图3-3所示: 图3-3 STM32发送触发信号 测距功能触发后,模块将自动发出 8 个 40kHz 的超声波脉冲,并自动检测是否有信号返回,这一步由模块内部自动完成。 一旦检测到有回波信号则ECHO引脚会输出高电平。高电平持续的时间就是超声波从发射到返回的时间。此时可以使用定时器获取高电平的时间, 并计算出距被测物体的实际距离。公式: 距离=高电平时间*声速(340M/S)/2。 另外有关于PWM的原理以及定时器的理论知识请见实验二以及实验三。 4、实验步骤 4-1.看懂原理图
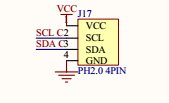
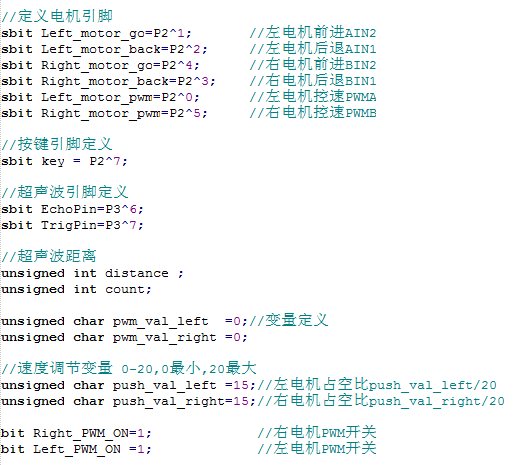
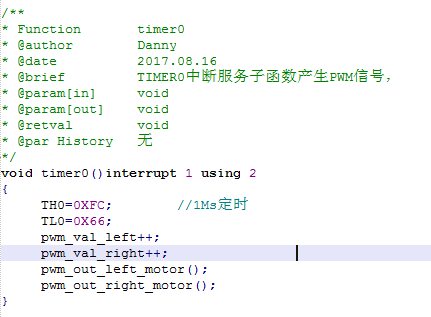
图4-1 单片机主控板电路图 图4-2 超声波接线头 4-2 理解原理图 由电路原理图可知超声波的Trig引脚接在接在主控板上的RD(SCL_C)上,而Echo接在主控板上的WR(SDA_C)上。 4-3.程序核心代码如下: 1.基本变量以及引脚的定义:
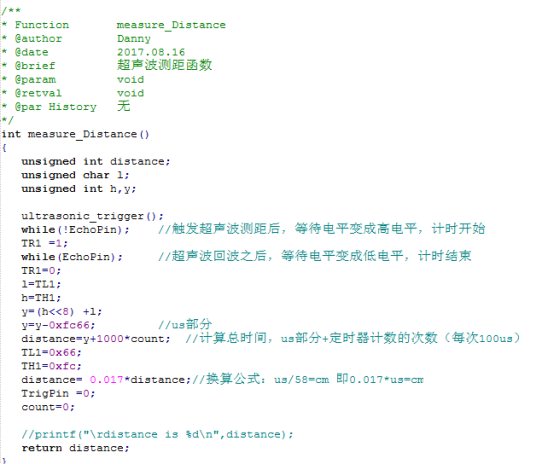
5.超声波测距函数:
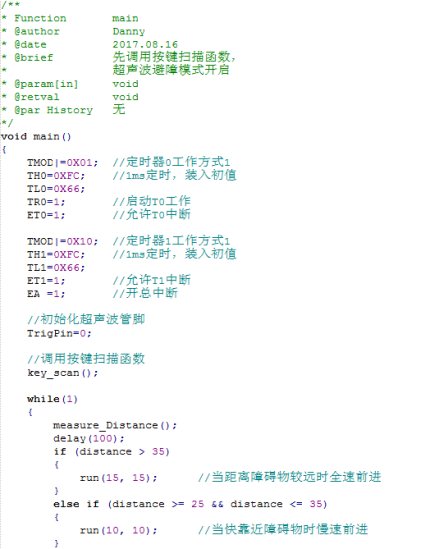
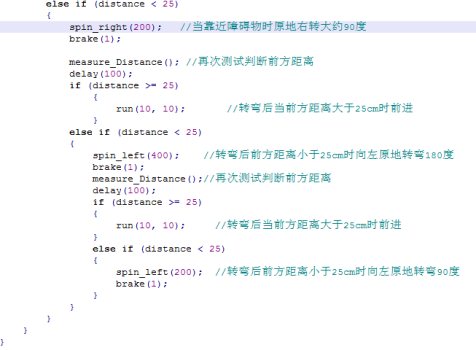
6.主函数 | 
















 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

