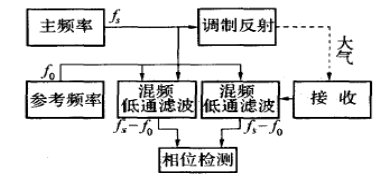
�߾��ȼ����࣬��λ��ԭ�����㷨ʵ��
��λ���������������� ժҪ���Ľ����˰뵼�弤�⼼��,���ڴ�ͳ����λ��������ԭ���Ļ�����, �ο��������ѧϵͳ���,����������ؼ��IJ������������һ�ְ�ֱ������Ƶ�ʺϳ�(DDS) �����������źŴ���(DSP) �������ϵ��µ���λ������������ƣ�������������ڼ�·�������λ���ľ��ȡ�
Ŀ¼��һ�� ���� �ڶ��� �������о�״�� ������ �������ѧϵͳ 3��1 �������ǵ�ϵͳ�ṹ 3��2��ѧϵͳͼʾ 3��3 ��ѧϵͳ�����Ҫ�������������� 3��4 ��Ҫ�ο��������� ������ ������ؼ�⼼���Ľ�������� 4��1 ������λʽ���Ļ���ԭ�� 4��2 �����źŴ���(DSP)�ļ��� 4.2.1 �����źŴ�������Ҫ�о����� 4.2.2 �����ź����ֻ������Ļ������� 4.2.3 ���ִ����źŵ����� 4��3 ֱ������Ƶ�ʺϳɼ��� 4.3.1 DDS�Ļ�������ԭ�� 4��4 �Ľ������ֲ���Ŀ�ͼ��� ������ С�� �Ρ������ġ��� ��л
��һ�� ���� ���⣬��һ����Ȼ��ԭ�������ڵģ����ܼ��������ľ��з����Ժá����ȸߡ���ɫ�Ժú�����Ժõ����ԵĹ⡣����ѧ�ҰѲ�������Ļ�����Դ��1917�갮��˹̹���ͺ�����䶨��ʱ����ļ�˵����������պͷ���ɾ����ܼ����ա��ܼ�������Է��������ֻ�������[1]�� ��ν���⼼��������̽���������ֲ�������ķ����Լ�̽��Ӧ�ü������Щ����Ϊ�����츣�ļ������ܳơ�30�����������⼼���õ�ͻ���ͽ��ķ�չ�����ü��⼼�����������˸�����ɫ�Ķ��ֶ����ļ��������������ż���Ӧ��������չ���γ��˼��⳪�̳���������ҽ�ơ�����ӹ�������ȫϢ���ࡢ��������ӡˢ�������ӡ�Լ�����������һϵ�����˲�ҵ�����⼼���ķ��ٷ�չ��ʹ���Ϊ�����¼����������ȷ棡 �������ͨ��ĸ�����ͬ��������һ���кܸ߹��ӼȵĹ⡣���Ӽȿ�������Ϊ������ͬģʽ(���͡�λ�ࡢ����)�Ĺ�����Ŀ,��������ͬ״̬�Ĺ�����Ŀ����Щ����ʹ����������õ�ֱ�Լ��dz�С�ķ�ɢ��,ʹ�����ɽ��е�Ե�IJ���,��Ӧ�dz���С���ӵIJ����������������Ǿ������ü������õ�ֱ�Լ��dz�С�ķ�ɢ�Ƕ������������һ��������������A��B ���������һ������ʱ��Ϊt, ��A��B ��������D �ɱ�ʾΪ: D = c��t /2,ʽ��, cΪ���ڴ����д������ٶȡ����ڹ��ټ���, ����һ����̫���D ��˵, t��һ����С��������:����D =15km, c = 3 ��105 km / s,��t = 5 ��10- 5 s���ɲ�ʽ��֪,��ξ�ȷ������ʱ��t��ֵ�Dz��Ĺؼ��� ���ڲ���ʱ��t�ķ�����ͬ,����������ֲ���:���������λ��ࡣ������λ�����Ӿ�ȷ[1]��
�ڶ��� �������о�״�� ��λʽ�����༼�����о���ʼ��20 ����60���ĩ,��80 �������½������˼�����������ѧϵͳ���źŴ�����·�еĹؼ�����,80 �������ת��Ӧ���о���,�����Ƴ��˸��ֲ�ͬ��;������,90�������,���ֳ���IJ�Ʒ���ϳ���,Ԥ�ƽ��ڽ�����Ӧ�ò�Ʒ��չ�Ľ�,���С����̼�����Ӧ�÷�����ȡ��YAG��������ơ����ż��⼼���ķ�չ, Ӧ�ü��������ܹⲨ���ϵͳ�Ĺ�Դ, ���ִ�����������һ�������ص㡣 �ݽ��������, �������ڴ�ز��������к��̲����ĸ���������Լ15000��̨������, ���̼��г̸�ռ1/4, �̳̲����ռ1/2�����ҵ��������ѰѸ��ּ������Ǻ���������Ϊ���豸, װ��������ҵ�ӡ� ���������г��̼������ǵļ�����չ�������ص�: ��1�� �ձ����He -Ne�����Դ, ����Ϊ1��5mW; ��2�� �ձ������ӱ�ĸ�Ч������,��ADP(��������NH4H2PO4), KDP(��������(KH2PO4)), KD*P(�����뮼�(KD2PO4))�ȣ���3�� ���Զ��������ֻ�����չ����Զ�̼������ǵľ�����Ҫ���ܵ�������������, ����ֵ��ע��ġ���������Geodolit-3GԶ�̼�������, �����ֲ���ķֱ������0.03 mm, ��̶����Ϊ��0.03 mm, �����ı����������1 mm/km[2]�� Ϊ��ò��ߵ�ƽ������, ��ѹ��ʪ�����Ӱ���1mm/km�� ����Ҫ�÷ɻ��ز���������ⶨ, �����ҵ�����Dz�����ġ��Ա�֮��, ��0.03 mm�IJ���ֱ���, ���ڵ�ɫ�����Զ�̲��, �������衣 �̵̳ĹⲨ�����ͨ�����黯�ذ뵼��(GaAs)���Ⲩ�μ���Դ�ĺ�������Ϊ��, ʵ����Ҳ����������He -Ne��������Դ�����������ձ������Զ��������ֻ���С�ͻ���һ�����ܵķ���չ���������Ĺ��ܿɷ�Ϊ���������, ����������ϵ�����, ��ࡢ�����������������(�����ٲ���)���߾��ȵĶ̳̲���������ࡣ ����������������ǿ�ƹ��Ļ������뾭γ�ǽ���ʹ��, �����ڱ߽Dz����͵��߲�����ʵʩ, ��������Ҳ�ɲ��ü����Դ���ǡ����ϵ������ж���: һ���Dz��ϵͳ��Ϊ��γ�ǵĸ���, ��ľʽװ�ھ�γ����, ���Զ�����뾭γ�Dz������ֱ��Ϊˮƽ���벢���������Dx��Dy�ļ���. ��DI-3��DI-3S; ��һ���ܽ��Զ�������ѧ����
�������һ����Ƶ�����������, Ϊ����ྭγ��,��SM11[2]��
�� ����ǡ���ࡢ��������ϵ�����(��AG710)�����������ݴ���������������Dz��ֲ��ñ������, �ǶȺ;���һ�������Զ�������ʾ���Զ�����Ĺ��ܰ����Զ�����ˮƽ���롢�߲�, �Զ��������������Լ��Զ��������ڲ�վ�Ĵ����㼫����, �����Զ���¼�ڿ�ֽ���ϡ��������������ֳ�Ϊ�����ٲ��ǡ�����������Ӧ�����ռ�, ��ʹ��ͳ�ij��в������̿��⡢С����ĵ��β�������Ϊ֮���Ĺ�, ���Ѳ�ࡢ��ǡ���ߺͼ�����һ̨�����Ͻ������, �Ӷ��ڲ�վ�Ͻ�������֮�ھ�ֱ�ӻ�ò����������, �����ô���ֽ��Ϊ�Զ����Ƶ���ͼ������ͼѸ���ṩ�˴�����ԭʼ���ϡ� �̳̲���ǵľ�����Ҫ����߲��ྫ��, ��Ϊ���������IJ�̶��� ��1��2km֮��, ���Զ������˵���������Ӱ�첻����Ҫ���ء��̳̲���ǵľ�����ҪӰ���ǹ̶����, ���̶���������Dz������ռ��Ҫ��λ, ���, ���ٲ������, �����Ƹ߾��ȶ̳���λ����ǵĹؼ���Ȼ����һ���IJ��ྫ����, ��ߵ���Ƶ����һ����֮��Ч�Ĵ�ʩ��
������ �������ѧϵͳ 3��1 �������ǵ�ϵͳ�ṹ������Ӳ����һ���ɼ����Դ��������Ƽ������·����ѧϵͳ�����յ�Ԫ����Ƶ�Ŵ��·���������ֵ�·������·����·���������������,ϵͳ��ͼ��ͼ3.1��ʾ�������Դ���ð뵼�弤������ܡ����ְ�������Ԫ�ͱ���Ԫ,ͨ��Ƶ�ʺϳɵ�·�ֱ��������Ƶ���źźͻ���Ƶ�źš�����Ƶ���źž���һ���IJ��α任���ʷŴ��,�����ڼ��������,�����ڵ���,�������Ƽ����ź�[3]�� 
ͼ3.1 �������ǵ�ϵͳ�ṹ Fig.3. 1 laser ranging equipment system structure �������ѧϵͳ��Ƶķ�����ԭ��Ϊ����Ŀ��ָʾ,Ŀ���ٶȷֱ���8km/ h ����������,֡ƵΪ100��200 ֡/ s����ȷ��� ����ÿ��1000 �ε����ʱ��Ų���¼��λ�����ǡ������ʱ�����ݣ���������任,�Ա�����߾��ȵ�ʵʱλ������,���ڻ�ͼ��������ʾ��ʹ�ó���ָ����λ�ϼ�������,��֤Ŀ��������ؼ������ڰ�ȫ����Χ�ڰ�ȫ���ơ�
�����¡��������ѧϵͳ 3��2��ѧϵͳͼʾ
ͼ3.2 ������Ĺ�ѧϵͳ Fig. 3.2 Laser ranging optical system ͼ3.2 �Ǽ�����Ĺ�ѧϵͳ[4]����ϵͳ�����������䲿��:һ��������( GaL1As) ���ⷢ���;����������(CO2) ���ⷢ���;������λ( GaA1As) ���ⷢ�����ͼ��:1 - ������( GaA1As) ���ⷢ���; 2 - ��λ( GaA1As) ���ⷢ���;3 - ������(CO2) ���ⷢ���;4 ��5 - ���ӹ�̽����;6 ��7 - ���������;8 ��9 -ǰ�÷Ŵ���;10 - �ɱ������;11 - ɢ����;12 ��30 -���ͨ��̽����;13 - ��������;14 - ��ά��������(CCD) ;15 - ������;16 - ��������; 17 - Ƶ������ʾ��;18 - ����ͨ��; 19 - �ȶ�ͨ��; 20 - ������;21 ��22 ��23 - ��; 24 - �����; 25 - �˹�Ƭ;26 - դ��;27 ��33 - ��դ��ƫ��; 28 ��32 - �ķ�֮һ��Ƭ;29 - �Ƕ��˲���;31 - ������;34 ��35 - ��λ����ɨ����;36 - �� λ����������;37 - ֱ������
3��3 ��ѧϵͳ�����Ҫ����������������λ( GaA1As) ���ⷢ��������������ڽ�����ǽػ����Ŀ��, ������Ŀ��Ĵֲ�; ������(GaA1As) ���ⷢ��ϵͳ���ھ�ȷ�IJ��; ������(CO2) ���ⷢ��ϵͳ���ڲ����ٶȡ������侵������,�ֱ�����GaA1As ��������CO2 ��������ƫתɨ��,Ŀ��ػ���̽�������ö�ά�ĵ���������CCD�� �����������Ĵ��й������ڹ�����Ϣ��ɵĴ洢�ʹ�������������ɵġ�����ѱ���Ŀ��Ĺ�ѧͼ��ۼ��ڵ���������ͼ�����Ĺ�������,�����ϸ����������Ĺ��������ӵ�����,���������ϵ�ͼ���������Ӧ����һ���Ϊ�����ʱ���ʱ������,��Щ�������������ӷֱ��ռ����洢�ھͽ���������,�γ�һ��������Ϣ��ɰ�,ÿһ����Ϣ��ɰ����������Ϣ��������������������������Ӧλ�õĹ�ǿ������,�����Ϊ�����ѧͼ������ȡ��ģ�⡣����,�Ͱѹ�ѧͼ��ת���Ϊ����Ϣ��������ĵ���ͼ��,����˹��ת���봢����Ϣ�Ĺ��̡�Ϊ�˰�ɨ��˳��ȡ������ɰ�����Ϣ���,ʹ�����յ�ͼ���Ե��źŵ���ʽ���ֳ���,���ڸ����缫������ʩ���й���仯��ʱ�������ѹ,�����缫�µ��������Ҳ������Ӧ�ı仯,�Ӷ�ʹ��ɰ��ܹ��ذ뵼������������˶��� ��ά�����������ĸйⵥԪ�ʶ�ά��������,��ɸй��������ڴ���Ͷ����ṹ��ʽ��ͬ,����ͼ�������ж�����ʽ�����ӹ�������Ŀǰ����������������ǰ;�Ĺ�絼̽���������Ĺ�����Ӧ��8��4��m ֮��,Ϊ�������ڲ���,���ֵ����Ϊ1016��m ��CO2 �������ļ��Ⲩ����ƥ��,��Ӧʱ��ԼΪ10 - 4ms ���������Դ˹�������ڼ������Լ�����仯�ʲⶨ����,������Ϊ̽������ �������ѧϵͳ�е��շ���Զ��������һ�̽���������˹�����۽�,�Ա��ü�С������,Ȼ������һ����������ʵ��ֱ�����䷽���ԡ�������������ֻ��������Ĺ����������ɡ�������Ԫ������������Ӧ�ȸߵ�ǰ������߸����������ľ�����,����С��������֮��Ĵ���[5]��
�����¡��������ѧϵͳ 3��4 ��Ҫ�ο������������þ���0��30 ,000m �ǶȲ���ȷ��< ��110�� �ֱ����0.115m �Ƕȸ��Ƿ�Χ180�� ɨ����ٶ�2��/ ms �Ƕ�ƫת��Χ0��20�� ������( GaA1As) ������������0185��m ������CO2 ������������1016��m ��λ( GaA1As) ������������01905��m ��ֵ���ʡ�����15W ������ʡ�����15mW �ظ�Ƶ�ʡ�����90pps (ÿ���ӵ�������) ����̽��������ѩ���������� ���վ�����18��100mm ���ĵ���λ������ּ��ϵͳ�Ǹ��ݼ�����Ĺ���ԭ�����ɼ�����ԭ���̶���չ����λʽ�������ԭ�������ο��ڼ���������������صĹ�ѧϵͳ����Ƶġ�
������ ������ؼ�⼼���Ľ�������� ��λ�������������÷���ĵ��ƹ��뱻��Ŀ�귴��Ľ��չ�֮���ǿ����λ�������ľ�����Ϣ��ʵ�ֶԱ���Ŀ�����IJ��������ڲ��õ��ƺͲ�Ƶ���༼��, ���в������ȸߵ��ŵ�, �㷺�����к���Ŀ��ľ��ܲ�ೡ�ϡ�������λʽ�����������������ȸ߶����㷺��Ӧ���ھ��¡���ѧ���������������������λʽ����ǵĻ���ԭ����ͨ���������������ź��ڴ�������������������� ������λ�ӳ�,����ӵزⶨ�źŴ���ʱ��,�Ӷ���ñ������. ���,�ź���λ�����ľ���Ҳ�;����˼������ǵľ���[6]�� �������ؼ�⼼�����źż��������һ����Ҫ����,�����ڵ�����ȵ��������ȡ�����õ��ź�,���н�ǿ�Ŀ�����������,��ͬƵ���������һ��,ʱ�������ط����������źŵ����������ﶼ��Ӧ��,����ͼ����������ң�С��״P����̽�⡢ҽѧ��ͨ�Ź��̵ȡ� �ڴ˱������һ�����͵ļ�����λʽ�����,�����ִ������źŴ�������Ӧ���ڲ��ϵͳ,���������źŴ���оƬ��ǿ����������㹦��,�Բɼ����źŽ��������������,����������ź���ο��źŵ���λ��,�̶��õ�����ֵ�� 4��1 ������λʽ���Ļ���ԭ����ͳ����λ���������,Ϊ����߲�������,ͨ����Ҫ�Ѽ������Ƶ����ߵ���ʮ�����������ף�Ϊ����������,ͨ���Ѽ������Ƶ�ʽ��͵�������������;Ϊ����߲�����λ�ľ���,ͨ���ѷ����źźͻز��ź��뱾���Ƶ��������ͼ�����ࡣ��Ҫͬʱʵ�ָ߾��Ⱥʹ�����,����Ҫ���鼤�����Ƶ��,�����Ų������ȵ����,����Ƶ�ʻ�ϵ����,��Щ�Ե�·����Ҫ���Խ��Խ��,��·�ĸ��Ӷ�Ҳ����֮����,�����ź�֮��Ĵ��Ż���֮����,����߾��ȼ����������ƺ���������ܴ�����ѡ�Ϊ�˿˷���Щ����,���������һ�ְ�ֱ�����ֺϳ�(DDS)�����������źŴ�����(DSP)���ϵļ������,����DSPǿ���ʵʱ�źŴ������ص��DDS ��������һ�������ڲ�������Ƶ�ʵ��ص�,ֻ��ѵ���Ƶ��������10�������ھͿ��Դﵽ�ܸߵIJ������Ⱥͺܴ������,�����ڹ������ṩ��һ�����������[6]�����ľ������ԭ��, ϵͳ��ͼ��������
�����¡�������ؼ�⼼���Ľ�������� ����ϸ�������� �����ٶ�c �ڴ����д�������A��B ���������һ������ʱ�������Ĺ�ϵ�ɱ�ʾΪ��L= ct/2�� ��ʽ��L���� ��������A��B ���ֱ�߾��룻c ���� ���ڴ����д������ٶȣ�t ���� ������AB һ������ʱ�䡣����ʽ��֪���������ʵ���ǶԹ���AB �䴫��ʱ��IJ��������ڶ�ʱ�����������ȷ�����Խ���ʱ��IJ���ת��Ϊ����λ��IJ�������λ��IJ������Դﵽ�ܸߵľ��ȣ��ʶ�����IJ���Ҳ�ʹﵽ�˺ܸߵľ���[7]�� �������������ߵ粨�ε�Ƶ��,�Լ��������з��ȵ��Ʋ��ⶨ���ƹ�����һ������������λ�ӳ�,�ٸ��ݵ��ƹ�IJ����������λ�ӳ��������ľ��롣���ü�ӷ����ⶨ���⾭�������������ʱ��,��ͼ4.1��ʾ�� 
ͼ4.1�������λʾ��ͼ Fig.4.1 range finder phase schematic drawing ��λʽ������һ��Ӧ���ھ��ܲ���С������侫�ȸ�,һ��Ϊ����,Ϊ����Ч�ط����ź�,��ʹ�ⶨ��Ŀ��������������������Ƶ�ijһ�ض�����,�����ֲ���Ǵ�������˱���Ϊ����Ŀ��ķ��侵�� ͼ4.2Ϊ���͵�ģ������·��ԭ��ͼ[8]�� ͼ4.2 ��ģ������·ԭ��ͼ Fig. 4.2 the simulation measures the electric circuit schematic diagram Ϊ���۷���,���������¼��裺 1) ����Ƶ���źźͲο�Ƶ���źŵij�ʼ��λΪ0�㡣 2) �����ľ���С��c2/ fs(һ���Ϊ���) ������c Ϊ���٣�Լ����300000000m/s , fs Ϊ����Ƶ�ʡ� 3) �����������Ϊ0�� ����Ƶ���ź�S1 = A cos ( wst ) , �ο�Ƶ���ź�S2 = Bcos ( w��t ) , ��fs > f0 , ��ô���յ��ź�Ӧ��ΪR = Ccos ( ws +��) ��ʽ��:�ձ�ʾ��λ�仯,��ô������Ƶ���͵�ͨ�˲������źŷֱ�Ϊ�� E1 = Dcos[ ( ws - w��)t ] , E2 = Ecos[ ( ws - w��)t +��]�� ����ɼ����·�������λ���, ���ɵõ�ʱ���t =��/2��fs������L =c��/2��fs�� һ����λ��ⶼ�Dz���ƽ���������ֲ��෨������2 �ַ��������ڵ�·���ӡ������ʹ�ò����ȱ�㣬�������侫�Ȳ��ߣ���ijЩ�����Dz�������Ҫ��ġ�Ϊ����߲���ľ��Ⱥͼ�����������������ִ������źŴ���(DSP)������ֱ������Ƶ�ʺϳɣ�DDS�������Է��������˸Ľ�,���������֮ǰ,Ҫ�ȶ������źŴ���(DSP)������ֱ������Ƶ�ʺϳɣ�DDS���������г����˽����ʶ�� 4��2 �����źŴ���(DSP)�ļ��������źŴ���(DSP)������ר�û�ͨ�õ������źŴ���оƬ�������ּ���ķ������źŽ��д��������д����ٶȿ졢����ȷ������������ǿ�����С���ŵ㡣DSP��
�����¡�������ؼ�⼼���Ľ�������� ����Ϊһ���µļ�������Ͷ�����ѧ����ϵ����ǰ�Ѿ��γ�����DZ���IJ�ҵ���г������ִ����ͨ����Ҳ�õ�ʮ�ֹ㷺�ͳɹ���Ӧ�á� ������˵�������źŴ������о������ַ������źŽ��з������任���˲�����⡢���ơ�����Լ������㷨��һ�ż���ѧ�ơ����ܶ�����Ϊ�������źŴ�����Ҫ���о��й������˲���������ɢ�任�����㷨�������������������ֵ�·��ϵͳ�����Լ�����������ķ�չ�������źŴ�������Ҳ��Ӧ�صõ���չ����Ӧ������ʮ�ֹ㷺�������˲��� �����˲�����ʵ����ʽ�ܶ࣬���Կɷ�Ϊ���弤��Ӧ�ͺ����弤��Ӧ�����࣬����Ӳ�����������ַ�ʽʵ�֡���Ӳ��ʵ�ַ�ʽ�У����ɼӷ������˷����ȵ�Ԫ����ɣ������������������͵����������ɵ�ģ���˲�����ȫ��ͬ[9]�� 4.2.1 �����źŴ�������Ҫ�о����������źŴ�����Ҫ�о����������л�������б�ʾ�źţ��������ּ��㷽������Щ���н��д������Ա���źű任�ɷ���ij����Ҫ����ʽ�������źŴ�������Ҫ���ݰ���Ƶ�����������˲����źŵ�ʶ��ȡ� �����źŴ����г��õ������в�ַ��̼��㡢���ϵ�����㡢��ɢ����Ҷ�任���㡢�������ܶȼ��㡢�������㡢������ָ�����㡢��Ƶ�ʱ任��ģ������ֵת���ȡ��ܶ������źŴ������⣬����������Щ�㷨���������������㣬�����ʵ��������ʵ��[10]�� 4.2.2 �����ź����ֻ������Ļ��������������Ӽ������źŴ��������ķ�չ���ڹ��̲����У������źŴ��������õ��㷺��Ӧ�ã��ѳ�Ϊ����ϵͳ�е���Ҫ���֡��Ӵ�������ȡ�IJ����ź��д����Ϊģ���źţ����������źŴ���֮ǰ��һ����Ҫ���ź���Ԥ���������ֻ�������������ʽ���������ֱ��ͨ���ӿ����������ӣ��������ź�����������������źŴ����������д���[11]�� (1) Ԥ������ָ�����ִ���֮ǰ�����ź���ģ�ⷽ�����еĴ��������źű���������ִ�������ʽ���Լ�С���ִ��������ѡ���������źŵķ�ֵ���д�����ʹ�źŷ�ֵ��A��Dת�����Ķ�̬��Χ����Ӧ��˥���ź��в�����Ȥ�ĸ�Ƶ�ɷ֣���СƵ���Ӱ�죻
���뱻�����ź��е�ֱ�����������������ֱ�������ĸ��ŵ�������� (2) A��Dת���ǽ�Ԥ�����Ժ��ģ���źű�Ϊ�����źţ����뵽ָ���ĵط����������A/Vת�������źŴ���ϵͳ������ָ�����������й�ϵ�� (3) �Բɼ����������źŽ��з����ͼ��㣬��������������������źŴ�������ɣ�Ҳ����ͨ�ü������Ŀǰ���������ٶȺܿ죬�ѽ����ﵽ��ʵʱ���� (4) �����ʾһ��������ݺ�ͼ����ʾ����� 4.2.3 ���ִ����źŵ����������źŴ����ܹ㷺Ӧ�����ִ����ͨ���У�����ΪDSP��ģ���źŴ�����ȣ����������ŵ�[12]�� (1) �źŴ����Ķ�̬��Χ���б�ģ���Ŵ�30dB�Ķ�̬��Χ������и��ߵľ��ȡ�
(2)�����źŴ��������������������ֳ���Ӱ�죬�������̲������������������и��ߵ�����ȡ�
(3)���и߶ȵ�����ԣ��ܹ����ٴ�������������飬����ʱ�ֶ��á����д��������������ظı�ϵͳ����������ʽ����������ϵͳ���档
(4)���м��õ������ԡ��ɿ��Ժ�Ԥ���ԡ�
(5) �㷨����ֱ�ӵĿ�ʵ���ԡ�
(6)����������ƽ����źͶྶ���ţ���������Ӧ����ѻ���ʵ�ַ���ȥ�������е��źŴ����� �����ŵ���DSP(�����źŴ���)���ִ�����ͨ����Ӧ�õ���Ҫ��֤�� 4��3 ֱ������Ƶ�ʺϳɼ���ֱ������Ƶ�ʺϳɼ���(Direct Digital Frequency Synthesis��DDS)���Ǵ���λ�������ֱ�Ӻϳ����貨�ε�һ���µ�Ƶ�ʺϳɼ������ʹ�ͳ��Ƶ�ʺϳɼ�����ȣ�������Ƶ�ʷֱ��ʸߡ�Ƶ��ת���ٶȿ졢�����λ��������λ�����͡��ɱ�̺�ȫ���ֻ������ڼ��ɵ�ͻ���ŵ㡣DDS���Ƚ������ִ��������뷽�������źźϳ�����Ϊ�ִ�Ƶ��
�����¡�������ؼ�⼼���Ľ�������� �ϳɼ����е�ٮٮ�ߣ��õ���Խ��Խ�㷺��Ӧ�ã���Ϊ�ڶ����ϵͳ�в���ȱ�ٵ���ɲ��֡� 4.3.1 DDS�Ļ�������ԭ���� DDS����ԭ����ͼ��ͼ4.3��ʾ����ʵ�����Բο�Ƶ��Դ��ϵͳʱ�ӣ�����λ���еȿɿؼ���IJ���[13]�� 
ͼ4.3 DDS��������ԭ��ͼ Fig. 4.3 DDS works the basic schematic diagram ��ͼ4.3�ɼ�DDS��������λ�ۼ�����ROM��ѯ�����ɵ�������Դ��NCO����DAC�Լ���ͨ�˲�����LPF��3���֡� ��ÿһ��ʱ�����ڣ�Nλ��λ�ۼ������䷴��ֵ�����ۼӣ������ĸ�Mλ��ΪROM��ѯ���ĵ�ַ��Ȼ���ROM�ж�����Ӧ�ķ���ֵ�͵�DAC����ͨ�˲���LPF�����˳�DAC����еĸߴ�г�������ͨ���ı�Ƶ�ʿ�����K�Ϳ��Ըı����Ƶ��fout�����õ����Ƶ��fout��Ƶ�ʿ�����K�Ĺ�ϵΪ��fout=Kfc/2N������fcΪ��λ�ۼ�����ʱ��Ƶ�ʣ�NΪ��λ�ۼ�����λ���� ��FTW=1ʱ��DDS���ܲ����������źŵ����Ƶ�ʣ���Ƶ�ʷֱ���Ϊ����f=fomin=fc/2N�� 4��4 �Ľ������ֲ���Ŀ�ͼ�������ģ������·���ڵ�·���ӡ�������Ȳ��ߡ�ʹ�ò����ȱ��������ִ������źŴ���(DSP)������ֱ������Ƶ�ʺϳɣ�DDS�������ľ�չ���ƣ����Ķ�ԭ�еIJ����·ͼ�����˸Ľ�����ԭ����ͼ��ͼ4.4��ʾ��

ͼ4.4 ���Ľ������ֲ����ͼ Fig.4. 4 The improvement numeral measures the diagram �Ľ��IJ���ϵͳ��ԭ����ϵͳ�����Ҫ���������� 1) ��Ƶ���ź���ο�Ƶ���źŶ���ֱ������Ƶ�ʺϳ���(���DDS) ���������ַ����������Ƶ�ʵķֱ��ʸߣ����ҿ���ͨ����̸ı����Ƶ�ʣ������ı���,��߲��ľ��ȡ� 2) ������Ƶ����ͨ�˲������2 ·�źŽ���ģ��ת����·(ADC) ����DSP ������ͬһʱ������2 ·ADC �������ݲɼ�,����DSP����������ؼ��ķ���������λ��,�õ�����ֵ�� ����DSP ����ǿ���ʵʱ�����ص��DDS �����Ŀ�������,�ɽ�DSP ��DDS ���������Ƶ�һ���µļ������������DSP ��DDS ��������һ��������Χ�ڵ�����Ƶ��f ,��������Ƶ����,��һ����ɨƵ����,�ҵ����ڵ�����ʹ��λ��������Ļ�����ʽ:L =mc/2f+����/2��c2fʽ�Ц��� = 0��Ƶ��fs1����fs2������L[14] ����ϵͳ�ṹ��ͼΪͼ4.5��ʾ�� 
ͼ4.5������DDS ��DSP �ļ�������ṹͼ Fig. 4.5 Based on DDS and DSP laser range finder structure drawing
�����¡�������ؼ�⼼���Ľ�������� ��DDS ����������Ϊ: �ܲ��������Ƶ��fmax ,��СƵ��fmin ,DDS �IJ���(�ܿ��Ƶ���������Ƶ�ʲ�) Ϊ��f ,��DDS ����ɵ�Ƶ�ʼ��Ϊ��f �� �������ϵ�ԭ��,�������IJ�������Ϊ:ͨ��DSP ����DDS ��ʼ���Ƶ��Ϊ���,��Ϊ10MHz ,�ѷ����źźͻز��źž�����ͨ�˲��Ŵ�����AD ,ʵʱ������·�ź�S1 ��S2 ����DSP �����о�����,�����·�źŵı�ֵ��Ϊ��ֵ, �����ղ�Ϊ��,�����DSP ��DDS�Ŀ����ź�ֵ,ʹDDS ��������f ��СƵ��f ,��ÿһ��Ƶ�ʵ���,DSP ͨ��AD ��ʵʱ�����ź��ж��Ƿ��������ʵʱ���ȱ�Ϊ��ֵ,�������Ƿ�Ϊ��,����Ϊ��ֵ�����ͨ��DSP ����DDS ��Ƶ��,ֱ����Сf ��ʹ�����ڲ�������2 L��Ϊ��Ϊֹ,��ʱ2 L �պ�Ϊ������,����ͼ��˫·AD ����·����źŵ�������ͬʱ�̲������ϵı�ֵΪһ��ֵ,DSP ͨ���źŴ����жϴ�ʱ����Ϊ�㲢��¼�����Ƶ��ֵfs1��,��ʱ����������Ϊm1��,ͬ��,��fs1���Ļ��������µ���Ƶ��, ʹ������һ��(���ڵ�) ����Ϊ��Ϊֹ, ��ʱƵ��Ϊfs2��, ��ʱ����������Ϊm2��,����fs2��,����֤��,��������ڵij���������,��ʱ��m1��= m2��+ 1 ����L ��0 ��+ ��ʱ,��fmin < f < fmax �л�����������(����c Ϊ����) ,��ͬ��������㷽�̲�ͬ[15]�� �ٲ����ڦ��� = 0 , L <c/2fmax,��ʱ��λ��������Ļ�����ʽ�� L =mc/2f+����/2��c2f ��1����Ϊ�� L =����/2��c2f (2) ���������һ��ȡf Ϊ�̶�ֵf max = 10MHz��(2) ʽ��Ϊ�� L =����/2��c2fmax (3) ���Ц��յIJ����û���FFT ��������λ��������,�Ӷ����L ��ֵ�� ��ֻ����һ�Φ��� = 0 ,c/2f max< L <c/fmax,��ʱm = 1 ,���� = 0 ,��¼��Ƶ��Ϊfs1��, (1) ʽ��Ϊ: L=c/2fs1�� (4) �۳������λ��������Ϧ��� = 0 , ��ʱ, L > c/fmax ����(1) ʽ�� L =m1��c/2fs1�� (5) L =m2��c2/fs2�� (6) �ҡ� ��m1��= m2��+ 1 (7) �� L =c/2( fs1��- fs2��) (8) ���������������,��DSP �ڲ������Ļ�������Ϊͼ4.6 ��ʾ�� 
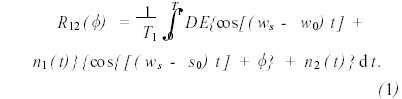
ͼ4.6 ��DSP �ڲ�����������ͼ Fig. 4.6 DSP interior software flow chart 4��5 ������ؼ���ԭ�����ڱ�ϵͳ�е�ʵ������غ�����������Ϊ2���źŵij˻���ʱ��ƽ��,����һ�������õ�ͳ����,һ���������������˽�2��δ֪�ź�֮������Ƴ̶�,����2����֪�źŵ�ʱ���ϵ����һ�������к�ǿ�Ŀ�����������������Ϊ�����źŵ����ϵ������Ϊ��,�����ź��о���ʹ����ؼ��ķ�����ȡ���õ��ź�[16]���ź�x ( t) ��y ( t) �Ļ���غ������ϸ������£� ʽ��: T ��ƽ��ʱ��,���x ( t) ��y ( t) ������ΪT0 �������ź�,��ֻ��Ҫ������1 ������������ؼ��㼴��,��
�����¡�������ؼ�⼼���Ľ�������� �������еĻ���صĹ�ʽ���£�rxy (��) =1/N ��x ( n) y ( n +��)��ʽ��: N Ϊ����źŵļ�¼����(�����ĵ���) , 2���źŵ�ʱ��Ϊ��,��= 0 , 1 , ., N - 1 , ͨ��ֱ�ӳ�Ϊʱ��, T Ϊ����ʱ������ �ڱ�ϵͳ��Ϊ�˷�������, ����ģ�����з���,������ķ�����֪������Ƶ���͵�ͨ�˲���������źŷֱ�Ϊ[17]�� E1 = Dcos[ ( ws - w0) t ] + n1 ( t) �� E2 = Ecos[ ( ws - w0) t + ��] + n2 ( t) �� ʽ��: n1 ( t) ��n2 ( t ) �ֱ����������������. �ɻ���صĶ����֪,�ź�E1 ��E2 �Ļ���غ���Ӧ�Ǧյĺ���,�����ʽ����: ʽ��: T1 Ϊ��Ƶ�źŵ�����,�����������������Խϲ�,��ʽ(1) �ɵã� R12 (��) = DEcos��/2�� (2) ��ʽ(2) ��֪, Ҫ��õ���λ���, ����Ҫ֪��D ��E ��ֵ, D ��E ��ֵ�����ĸ��űȴ�,�����������Ҫ����һ������.������ģ��ת����·��2 ·�źŷֱ��ʾΪ�� E1 ( n) = Dcos[ ( ws - w0) n T ] + n1 ( n T) �� E2 ( n) = Ecos[ ( ws - w0) n T + ��] + n2 ( n T) �� ���������ڵ���غ���Ϊ�� r12 (��) =1/N ��E1 ( n) E2 ( n) ���ź�E1 ( n) ��E2 ( n) �ľ�����ֵΪ�� ���������źŷ��ȷdz�С������FFT���������ܵ��������Ϊ��ֹ����ķ�����FFT�����ṩ�˹�һ�����ܣ���ѡ�����������������㳤��N��������FFT ������й�һ������FFT������Ͳ���Ҫ��һ���ˡ� �����źŵĹ�һ���Ľ��Ϊ�� ���õ���= arccos (��) ,���� L =c��/2��f ���о�����,��Ҫ��ʵ�ʵ�Ӧ�õ��У�����Ӧ��ע�����¼���: (1)���л��������IJ�������Ӧ�Dz�Ƶ�ź�һ�����ڲ��������������� (2) �����ϵļ�����Կ���,�ڽ���ģ��ת����·֮ǰ,һ��Ҫ�ܺõ��˲��� (3) �ڵ�·ʵ����,һ��Ҫ����2��ADC��2 ��DDS ͬʱ������ ������ С�� ��������Ƶļ�����λ��������ڳ���������ִ������źŴ�������,���ҽ�DDS ��DSP ���������Ƶļ�����������������ؼ���㷨�Ļ�����ʵ�ֵģ��÷�����������߲���ǵľ��Ⱥ��ȶ���,���ұ�����ںܴ�̶��ϼ��˵�·�ĸ��Ӷ�,��Ϊ�������Ǿ��ȵ�����ṩ��һ�������ϵ���ơ� ���ڼ�����ص�����,ʹ�������Ǿ������������������������ơ�����Ϊ��ˣ��������·�����������Ӽ����ķ�չ,�����ڼ��ɻ������ֻ�,ʹ��ϵͳ�ڿɿ��Է����Ϊ��ߡ�
������Word��ʽ�ĵ�51�����ص�ַ��
 ��λ����������������(�ۺ����°�).doc
(336.5 KB, ���ش���: 20)
��λ����������������(�ۺ����°�).doc
(336.5 KB, ���ش���: 20)
| 




 ����ԱQQ:125739409;��������QQȺ281945664
����ԱQQ:125739409;��������QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ�ռ�
QQ�ռ� ��Ѷ��
��Ѷ�� ��Ѷ����
��Ѷ���� �ղ�
�ղ� ����
���� ��
�� ��
��