етИіЯюФПзюжївЊбаОПСЫЛљгкSTM32F103ЮЂДІРэЦїЕФжЧФмаЁГЕПижЦЯЕЭГЕФЩшМЦЁЃећИіЯЕЭГжївЊАќРЈSTM32F103ПижЦЦїЁЂЕчЛњЧ§ЖЏЕчТЗЁЂКьЭтМьВтЕчТЗЁЂГЌЩљВЈБмеЯЕчТЗЁЃЮвУЧВЩгУSTM32F103аОЦЌЃЌВЩгУТіГхПэЖШЕїжЦаХКХЃЈPWMЃЉРДЭъГЩЖдЕчЛњЕФПижЦЃЌбМЃФЃПщВЩгУКьЭтЬНВтЗЈНјааКкАзЬНВтЃЌБмеЯФЃПщНјааеЯАЮяМьВтВЂЖуБмЃЌГЌЩљВЈФЃПщгУРДМьВтаЁГЕгыеЯАЮяжЎМфЕФОрРыЃЌЦфЫћЭтЮЇЕчТЗПЩгУгкЦфЫћЙІФмЕФЭиеЙЁЃаЁГЕдкдЫааЙ§ГЬжаЃЌБмеЯГЬађгХЯШгкбМЃГЬађЁЃ
1.НщЩм
1.1ЯюФПНщЩм
1.2баОПФПЕФ
1.3ЩшЯы
1.4баОПЗНЗЈМАЫМТЗ
1.5ГЩЙћ
2.ШэгВМўЩшМЦ
2.1жЧФмаЁГЕНщЩм
2.2жЧФмаЁГЕЕФзщГЩВПЗж
2.2.1ЮЂДІРэЦї
2.2.2ДЋИаЦїМьВтВПЗж
2.2.3ГЌЩљВЈМьВтВПЗж
2.2.4ЛњЦїШЫЕФНХ
2.3бМЃдРэ
2.3.1КьЭтЬНВтЗЈ
2.3.2бМЃЗНЗЈ
2.3.3ЕРТЗЯжЯѓЗжЮі
2.3.4бМЃДњТы
2.4БмеЯдРэ
2.4.1HC-SR04ЙЄзїдРэ
2.4.2здгЩБмеЯВпТд
2.4.3здгЩБмеЯДњТы
2.5здЖЏМнЪЛЯЕЭГзмЬхНсЙЙ
3.ШэгВМўЕїЪд
3.1ШэМўЕїЪд
3.2гВМўЕїЪд
4.НсТл
1.НщЩм1.1ЯюФПНщЩмБОЯюФПЪЧвЛИіздЖЏМнЪЛЯЕЭГЕФЯюФПЃЌИУЯюФПФмЙЛЭЈЙ§ЬсЙЉздЖЏМнЪЛЁЂЖдТЗПіжЧФмДІРэвдМАЦфЫћЮЊааЪЛЯЕЭГЩшМЦЕФаТЙІФмЃЌИљОнГЁОАЩшЖЈЭъГЩздЖЏМнЪЛЁЃИУздЖЏМнЪЛЕФЩшБИПЩвдЪЧЫНМвЦћГЕЃЌ ЛѕГЕЃЌвВПЩвдЪЧПЈГЕЕШЁЃ 1.2баОПФПЕФЩшМЦвЛИіздЖЏМнЪЛЯЕЭГЃЌПЩвддкЬиЖЈЕиЗНбАевЙьМЃЃЌВЂбизХЙьМЃаазпЃЛПЩвдМьВтЕНеЯАЮяЕФОрРыВЂНјааЖуБмЁЃ 1.3ЩшЯыМйЩшдкаЃЗНЬсЙЉЬсЙЉЕФбљЛњЁЂКьЭтЬНВтЦїЁЂГЌЩљВЈМьВтФЃПщЙІФме§ГЃЃЌЕчГиЕчСПГфзуЃЌдДГЬађЫМТЗДњТыОље§ШЗЃЌГЁЕиЙьМЃУїЯдЕФЧщПіЯТЃЌЮвУЧЕФаЁГЕПЩвдбизХКкЩЋЙьМЃЯпГжајаазпЃЌгіЕНеЯАЮяЪБаЁГЕЭЃжЙЃЌвЦПЊеЯАЮяКѓЃЌаЁГЕПЩМЬајбизХЬиЖЈЕФЙьМЃаазпЃЌжБжСЮвУЧвЊЧѓЦфНсЪјЁЃ 1.4баОПЗНЗЈМАЫМТЗБОДЮЪЕбщЮвУЧВЩШЁФЃФтЗЈЃЌЪЙгУHL-1 жЧФмаЁГЕФЃФтецЪЕЕФЦћГЕЃЌНјааЪЕбщЁЃЪЕбщЙ§ГЬжаЃЌЮвУЧФЃФтВЛЭЌЕФТЗПіЃЌР§ШчЁАTаЭТЗЁБЁЂЁАЪЎзжТЗЁБЁЂЁАЖЯЭЗТЗЁБЕШТЗПіЃЌНЋаЁГЕЗХдкЯргІЕФЮЛжУЃЌЙлВьЦфКьЭтЬНВтЕФжИЪОЕЦЕФССУ№зДПіЃЌВЂМЧТМЯТРДЃЌЗжЮіЦфЖдгІЧщПіЪБIOПкЕФЪфШыЧщПіЃЌЕУГібМЃЮБДњТыЃЛБмеЯЪБЃЌЮвУЧЭЈЙ§ЩшжУеЯАЮяЃЌЗжЮіаЁГЕгіЕНеЯАЮяЪБгІзіГіЕФЛигІЃЌЕУЕНЯргІЕФЮБДњТыЁЃзюжеНјааећЬхДњТыЕФЗжЮізЋаДЁЃ
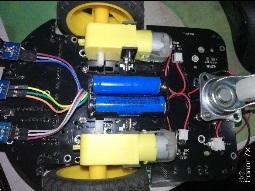
1.5ГЩЙћбМЃЃКаЁГЕдкЬиЖЈГЁОАФЃЪНЯТЃЌАДееКкЩЋЕФЙьМЃааЪЛЃЛ БмеЯЃКбМЃФЃЪНЯТЃЌаЁГЕгіеЯАЮяЭЃжЙЃЛздгЩФЃЪНЯТЃЌаЁГЕЕНеЯАЮяЕФОрРыДѓгк20cmЪБжБааЃЌаЁГЕЕНеЯАЮяЕФОрРыДѓгк10cmаЁгк20cmЪБгвзЊЃЛаЁГЕЕНеЯАЮяЕФОрРыаЁгк10cmЪБКѓЭЫЃЛ ЮФЕЕЃКЬсНЛММЪѕБЈИцЁЂЛсвщМЭвЊЁЂНјЖШМЦЛЎБэЁЂШЮЮёЪщзщЁЂЯюФПзщГЩдББэЕШЮФЕЕ 2.ШэгВМўЩшМЦ2.1жЧФмаЁГЕНщЩм- жЧФмаЁГЕЪЧТжЪНЛњЦїШЫЁЃ
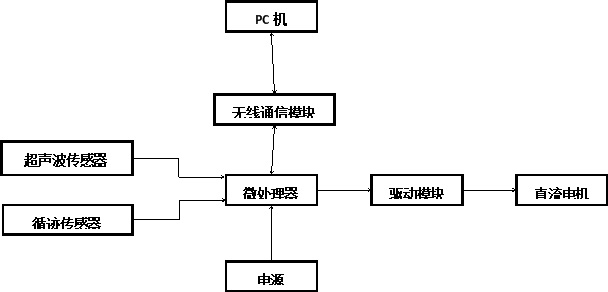
- ЫќЪЧвЛИіМЏЛЗОГИажЊЁЂЙцЛЎОіВпЁЂздЖЏМнЪЛЕШЙІФмгквЛЬхЕФзлКЯЯЕЭГ ЁЃ
- ЫќЪЧМЏжадЫгУСЫМЦЫуЛњЁЂДЋИаЁЂаХЯЂЁЂЭЈаХЁЂЕМКНЁЂШЫЙЄжЧФмМАздЖЏПижЦЕШММЪѕЕФзлКЯЬхЁЃ
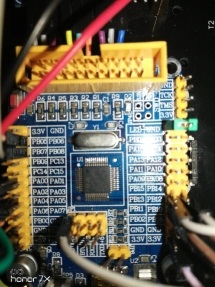
ЭМ 1 жЧФмаЁГЕећЬхЭМ 2.2жЧФмаЁГЕЕФзщГЩВПЗж2.2.1ЮЂДІРэЦїЭМ 2 STM32F103C8жїаОЦЌећЬхЭМ STM32F103C8жїаОЦЌ - ФкКЫЃКARM 32ЮЛЕФCortex-M3 CPU ЙЄзїЦЕТЪ72MHz
- ДцДЂЦїЃК64KBЩСДцГЬађДцДЂЦїЁЂ20KBЕФSRAM
- ЕчдДЕчбЙЃК2.0V~3.6V
- Ъ§ОнзЊЛЛЦїЃК2Иі12ЮЛADзЊЛЛЦїЃЈ10ИіЪфШыЭЈЕРЃЉ
- ЕїЪдФЃЪНЃКДЎааЕЅЯпЕїЪдЃЈSWDЃЉКЭJTAGНгПк
2.2.2ДЋИаЦїМьВтВПЗжЭМ 3 КьЭтЗДЩфДЋИаЦїећЬхЭМ КьЭтЗДЩфДЋИаЦї - МьВтОрРыЃК1mm~8mm
- БШНЯЦїЪфГіЪ§зжПЊЙиСПЃЈ0КЭ1ЃЉ
- ХфЖрШІПЩЕїОЋУмЕчЮЛЦїЕїНкСщУєЖШ
- ЙЄзїЕчбЙЃК3.3V~5V
ДЋИаЦїЕФКьЭтЗЂЩфЖўМЋЙмВЛЖЯЗЂЩфКьЭтЯпЃЌЕБЗЂЩфГіЕФКьЭтЯпУЛгаБЛЗДЩфЛиРДЛђБЛЗДЩфЛиРДЧПЖШВЛДѓЪБЃЌБШНЯЦїЕФЪфГіЖЫЮЊИпЕчЦНЃЌжИЪОЕЦЯЈУ№ЃЛЕБКьЭтЯпБЛЗДЩфЛиРДЧвЧПЖШзуЙЛДѓЪБЃЌБШНЯЦїЕФЪфГіЖЫЮЊЕЭЕчЦНЃЌжИЪОЕЦБЛЕуССЁЃ 2.2.3ГЌЩљВЈМьВтВПЗжЭМ 4 HC-SR04ећЬхЭМ HC-SR04в§НХ - VCCЙЉ5VЕчдД
- GNDЮЊЕиЯп
- TRIGДЅЗЂПижЦаХКХЪфШы
- ECHOЛиЯьаХКХЪфГі
Бэ 1 HC-SR04ЕчЦїВЮЪ§ | | | | | | | | | ЪфГіTTLЕчЦНаХКХаХКХЃЌгыЩфГЬГЩБШР§ |
2.2.4ЛњЦїШЫЕФНХЭМ 5 LN98NМЏГЩЕчЛњЧ§ЖЏећЬхЭМ ГЕТжЮЊШ§ИіЃЌЧАТжЪЧСНИіжїЖЏТжЃЌКѓТжЪЧвЛИіДгЖЏТж - СНИіжБСїЕчЛњ
- L298NМЏГЩЕчЛњЧ§ЖЏаОЦЌ
- ЙЄзїЕчбЙЃК5V
ЮЂПижЦЦїВњЩњPWMаХКХИјL298NЃЌЭЈЙ§ЕїНкЗНВЈЕФеМПеБШРДПижЦЕчЛњЕФзЊЫйЁЃСНИіЕчЛњзЊЫйЯрЭЌЪБаЁГЕЧАНјЛђКѓЭЫЃЛзЊЫйВЛЭЌЪБаЁГЕзЊЭфЃЛСНИіЕчЛњЗДЯђЕШЫйдЫзЊЪБЃЌаЁГЕдЕизЊШІЁЃ 2.3бМЃдРэаЁГЕбМЃжИЕФЪЧаЁГЕдкАзЩЋЕиАхЩЯбКкЯпаазпЃЌЭЈГЃВЩШЁЕФЗНЗЈЪЧКьЭтЬНВтЗЈЁЃ 2.3.1КьЭтЬНВтЗЈРћгУКьЭтЯпдкВЛЭЌбеЩЋЕФЮяЬхБэУцОпгаВЛЭЌЕФЗДЩфЧПЖШЕФЬиЕуЃЌдкаЁГЕааЪЛЙ§ГЬжаВЛЖЯЕиЯђЕиУцЗЂЩфКьЭтЙтЃЌЕБКьЭтЙтгіЕНАзЩЋжНжЪЕиАхЪБЗЂЩњТўЗДЩфЃЌЗДЩфЙтБЛзАдкаЁГЕЩЯЕФНгЪеЙмНгЪеЃЛШчЙћгіЕНКкЯпдђКьЭтЙтБЛЮќЪеЃЌаЁГЕЩЯЕФНгЪеЙмНгЪеВЛЕНКьЭтЙтЁЃЕЅЦЌЛњОЭЪЧЗёЪеЕНЗДЩфЛиРДЕФКьЭтЙтЮЊвРОнРДШЗЖЈКкЯпЕФЮЛжУКЭаЁГЕЕФаазпТЗЯпЁЃ 2.3.2бМЃЗНЗЈВЩгУгыТЗУцбеЩЋгаНЯДѓВюБ№ЕФЯпЬѕЃЈАзЩЋТЗУцЩЯгаЬѕКкЩЋЧњЯпЃЉзїв§ЕМЯпЃЌЕБбМЃДЋИаЦїееЕНКкЯпЪБЪфГіИпЕчЦН1ЃЌееЕНАзЩЋЪБЪфГіЕЭЕчЦН0ЁЃ ЭМ 6 бМЃЪОвтЭМ 2.3.3ЕРТЗЯжЯѓЗжЮі | | | | |
бАМЃжБааЃЌбизХЕБЧАКкЩЋТЗОЖжИЪОжБаа | | | бМЃзѓзЊ90ЖШЃЌбизХЕБЧАКкЩЋТЗОЖжИЪОжБаа | | | бМЃгвзЊ90ЖШЃЌбизХЕБЧАКкЩЋТЗОЖжИЪОжБаа | | | гіЕНTаЭТЗПкЃЌИљОнУќСюзЊЭфЁЃУќСюзѓзЊЃЌЯђзѓзЊЭфЃЛУќСюгвзЊЃЌЯђгвбМЃзЊЭфЁЃ |  ЪЎзжТЗПк ЪЎзжТЗПк
| | гіЕНЪЎзжТЗПкЃЌИљОнУќСюааЪЛЁЃзѓзЊЃЌгвзЊжБаа | | | гіЕНЖЯЭЗТЗЃЌзѓзЊ180ЖШЕїЭЗ |
ЭМБэ 1 ЕРТЗзДЬЌФЃФт
ЮвУЧВЩгУШ§ТЗбМЃЃЌЙВ8жазДЬЌжИЪОЃЌЖдгІзДПіШчЯТЫљЪО Бэ 2 КьЭтМьВтзДЬЌЗжЮі
БИзЂЃКЮвУЧЩшМЦЕФЯпТЗжЎМфгавЛЖЈЕФОрРыЃЌLRзДЬЌВЛЛсГіЯж
2.3.4бМЃДњТыЭМ 7 бМЃДњТыНиЭМ 2.4БмеЯдРэ2.4.1HC-SR04ЙЄзїдРэ- ИјГЌЩљВЈФЃПщНгШыЕчдДКЭЕиЁЃ
- ИјТіГхДЅЗЂв§НХЃЈtrigЃЉЪфШывЛИіГЄЮЊ20usЕФИпЕчЦНЗНВЈЁЃ
- ЪфШыЗНВЈКѓЃЌФЃПщЛсздЖЏЗЂЩф8Иі40KHzЕФЩљВЈЃЌгыДЫЭЌЪБЛиВЈв§НХЃЈechoЃЉЖЫЕФЕчЦНЛсгЩ0БфЮЊ1ЃЛЃЈДЫЪБгІИУЦєЖЏЖЈЪБЦїМЦЪБЃЉ
- ЕБГЌЩљВЈЗЕЛиБЛФЃПщНгЪеЕНЪБЃЌЛиВЈв§ НХЖЫЕФЕчЦНЛсгЩ1БфЮЊ0ЃЛЃЈДЫЪБгІИУЭЃжЙЖЈЪБЦїМЦЪ§ЃЉЃЌЖЈЪБЦїМЧЯТЕФетИіЪБМфМДЮЊГЌЩљВЈгЩЗЂЩфЕНЗЕЛиЕФзмЪБГЄЁЃ
- ИљОнЩљвєдкПеЦјжаЕФЫйЖШЮЊ344Уз/УыЃЌМДПЩМЦЫуГіЫљВтЕФОрРыЁЃ
2.4.2здгЩБмеЯВпТд
Бэ 3здгЩБмеЯВпТдЗжЮі
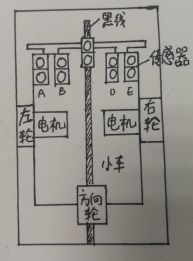
2.4.3здгЩБмеЯДњТыЭМ 8 здгЩБмеЯГЬађНиЭМ 2.5здЖЏМнЪЛЯЕЭГзмЬхНсЙЙ
ЭМ 8 здЖЏМнЪЛЯЕЭГзмЬхНсЙЙ 3.ШэгВМўЕїЪд3.1ШэМўЕїЪдЯЕЭГПЊЗЂЬѕМўЃКKeil 5.26.2.0 ЯТдиЙЄОпЃКJ-Link 6.20 3.2гВМўЕїЪдаЁГЕСЌЯпЃК ЁЄЕчдД аЁГЕJ2 ЈCVCC Нгstm32ПижЦАхJP2- +5V аЁГЕJ2 ЈCGNDНгstm32ПижЦАхJP2- GN аЁГЕJ2 ЈCVCCНгКьЭтПижЦАхVCC аЁГЕJ2 ЈCGNDНгКьЭтПижЦАхGND ЁЄЧ§ЖЏ аЁГЕJ3-IN1Нгstm32ПижЦАхJP3-PB10 аЁГЕJ3-IN2Нгstm32ПижЦАхJP3-PB11 аЁГЕJ3-IN3Нгstm32ПижЦАхJP3-PB12 аЁГЕJ3-IN4Нгstm32ПижЦАхJP3-PB13 аЁГЕJ3-EN1Нгstm32ПижЦАхJP3-3.3V аЁГЕJ3-EN2Нгstm32ПижЦАхJP3-3.3V ЁЄКьЭтаХКХЪфГі КьЭтПижЦАхD01Нгstm32ПижЦАхJ2-PB5 КьЭтПижЦАхD02Нгstm32ПижЦАхJ2-PB6 КьЭтПижЦАхD03Нгstm32ПижЦАхJ2-PB7 ЁЄГЌЩљВЈЪфШыЪфГі ГЌЩљВЈФЃПщНгаЁГЕJ6 аЁГЕJ4-P2.0Нгstm32ПижЦАхPA0 аЁГЕJ4-P2.1Нгstm32ПижЦАхPA4 4.НсТлБОДЮЯюФПЩшМЦСЫжабыДІРэФЃПщЁЂЕчЛњЧ§ЖЏФЃПщЁЂБмеЯФЃПщКЭбМЃФЃПщЁЃЦфжажабыДІРэФЃПщЕФаОЦЌЪЧstm32f103ЃЌЕчЛњЧ§ЖЏФЃПщЕФжївЊаОЦЌЪЧLM293DЃЌБмеЯФЃПщЕФжївЊЦїМўЪЧHC-SR04ЃЌбМЃФЃПщЕФжївЊЦїМўЪЧЮхИіКьЭтЬНВтЦїЃЈIRЃЉЁЃЭЈЙ§ИїФЃПщжЎМфЕФХфКЯвдМАШэМўКЭгВМўЩшМЦЕФНсКЯЃЌЪЙЕУзюжеЩшМЦГіЕФаЁГЕОпгабМЃЙІФмКЭБмеЯЙІФмЃЌМДФмбиЙьМЃКкЯпЧАНјЃЌВЛЛсЦЋГіЙьМЃЃЌВЂЧвЕБЬНВтЕНеЯАЮяЪБПЩЭЃжЙЧАНјЃЌЧвЬНВтОрРыДѓгк10cmЁЃзюжеЭъГЩСЫИУЯюФПЕФЩшЯыдЄЦкЁЃ
- #include <stdio.h>
-
- extern void CarInit(void);
- extern void DebugInit(void);
- extern void TimerInit(void);
- extern void CheckTimer(void);
-
- int main()
- {
- TimerInit(); // ЯЕЭГШЮЮёЖЈЪБЦїГѕЪМЛЏ
- CarInit(); // аЁГЕИїФЃПщГѕЪМЛЏ
- DebugInit();
-
- while(1)
- {
- CheckTimer(); // ПЊЪМжДааЖЈЪБШЮЮё
- }
- }
- timer.c
- #include "stm32f10x.h"
-
- void TimerInit()
- {
- RCC->APB2ENR |= 1 << 11;
-
- TIM1->PSC = 36000 - 1;
- TIM1->ARR = 65535;
- TIM1->CR1 = 0x81;
- }
-
- static unsigned short TimeGet()
- {
- return TIM1->CNT;
- }
-
-
- struct timer
- {
- void (*proc)(void);
- int reload;
- unsigned short begin;
- unsigned short duration;
- };
-
- #define TIMER_CNT_MAX 8
- static struct timer tmr[TIMER_CNT_MAX];
- static int tmr_cnt=0;
-
- int SetTimer(unsigned short duration, void (*proc)(void) , int reload)
- {
- if (tmr_cnt >= TIMER_CNT_MAX)
- {
- return 0;
- }
- tmr[tmr_cnt].begin = TimeGet();
- tmr[tmr_cnt].duration = duration;
- tmr[tmr_cnt].proc = proc;
- tmr[tmr_cnt].reload = reload;
- tmr_cnt++;
- return 1;
- }
-
- // CheckTimerЮЊжїГЬађбЛЗЕїгУКЏЪ§ЃЌжДааЖЈЪБЪТЮё
- void CheckTimer()
- {
- int tmr_idx=0;
- int i=0;
- unsigned short now = TimeGet();
-
- while (tmr_idx < tmr_cnt)
- {
- if ((unsigned short)(now - tmr[tmr_idx].begin) >= tmr[tmr_idx].duration)
- {
- if (tmr[tmr_idx].proc)
- (*tmr[tmr_idx].proc)();
- if (tmr[tmr_idx].reload)
- {
- tmr[tmr_idx].begin = now;
- tmr_idx++;
- }
- else
- {
- for (i=tmr_idx; i<tmr_cnt-1; i++)
- tmr[i] = tmr[i+1];
- tmr_cnt--;
- }
- }
- else
- tmr_idx++;
- }
- }
-
- 3.motor.c
-
- #include "stm32f10x.h"
-
- struct motor
- {
- enum {STOP, FORWARD, BACKWARD} state;
- int forward_opcode;
- int backward_opcode;
- };
-
- static struct motor left_motor, right_motor;
-
- void MotorInit()
- {
- RCC->APB2ENR |= 1 << 3;
- GPIOB->CRH &= 0xff0000ff;
- GPIOB->CRH |= 0x00333300; //PB10 зѓКѓЭЫ , PB11 зѓЧАНј, PB12 гвЧАНј, PB13 гвКѓЭЫ
- GPIOB->BSRR = ((1 << 10) | (1 << 11) | (1 << 12) | (1 << 13)) << 16;
-
- left_motor.state = STOP;
- left_motor.forward_opcode = 1 << 11;
- left_motor.backward_opcode = 1 << 10;
-
- right_motor.state = STOP;
- right_motor.forward_opcode = 1 << 12;
- right_motor.backward_opcode = 1 << 13;
- }
-
- //ЖдФГЕчЛњЪЉМгЧАзЊЧ§ЖЏЕчЦН
- static void MotorRotateForward(struct motor *pmotor)
- {
- if (pmotor->state != FORWARD)
- {
- GPIOB->BSRR = (pmotor->backward_opcode << 16) | pmotor->forward_opcode;
- pmotor->state = FORWARD;
- }
- }
-
- //ЖдФГЕчЛњЪЉМгКѓзЊЧ§ЖЏЕчЦН
- static void MotorRotateBackward(struct motor *pmotor)
- {
- if(pmotor->state != BACKWARD)
- {
- GPIOB->BSRR = (pmotor->forward_opcode << 16) | pmotor->backward_opcode;
- pmotor->state = BACKWARD;
- }
- }
-
- //ЖдФГЕчЛњЭЃжЙЧ§ЖЏЕчЦН
- static void MotorStop(struct motor *pmotor)
- {
- if (pmotor->state != STOP)
- {
- GPIOB->BSRR = (pmotor->forward_opcode | pmotor->backward_opcode) << 16;
- pmotor->state = STOP;
- }
- }
-
- //ЕчЛњПижЦКЏЪ§
- //ЪфШыВЮЪ§ЃКЕчЛњБъЪЖзжЗћ'r'ЛђЁЏl'ЃЈгвЛђзѓЃЉ ВйзїДњТызжЗћ'f'ЁЂ'b'Лђ's'ЃЈе§зЊЁЂЗДзЊЛђОВжЙЃЉ
- void MotorControl(char motor, char op_cmd)
- {
- struct motor *pmotor;
-
- if (motor == 'r')
- pmotor = &right_motor;
- else if (motor == 'l')
- pmotor = &left_motor;
- else
- return;
- if (op_cmd == 'f')
- MotorRotateForward(pmotor);
- if (op_cmd == 'b')
- MotorRotateBackward(pmotor);
- if (op_cmd == 's')
- MotorStop(pmotor);
- }
- wheel.c
- #include "stm32f10x.h"
-
- extern void MotorInit(void);
- static void WheelDrive(void);
- extern void MotorControl(char motor, char op_cmd);
- extern int SetTimer(unsigned short duration, void (*proc)(void) , int reload);
-
- struct wheel
- {
- unsigned short period;
- unsigned short duty;
- unsigned short current;
- unsigned char motor;
- unsigned char dir;
- };
-
- static struct wheel wheel_left, wheel_right;
- static enum{STOP, FORWARD, BACKWARD, LEFT, RIGHT, U_TURN} state;
-
- // WheelInitЪЧЖдаЁГЕЕФГЕТжвЊЕФЭтВПНгПкНјааГѕЪМЛЏЁЃ
- void WheelInit()
- {
- MotorInit();
-
- wheel_left.period = 50;
- wheel_left.duty = 15;
- wheel_left.current = wheel_left.period;
- wheel_left.dir = 's';
- wheel_left.motor = 'l';
-
- wheel_right.period = 50;
- wheel_right.duty = 15;
- wheel_right.current = wheel_right.period;
- wheel_right.dir = 's';
- wheel_right.motor = 'r';
-
- state = STOP;
-
- SetTimer(2, WheelDrive, 1); // УП1msжДаавЛДЮ
- }
-
- static void WheelRun(struct wheel *pwheel, char dir)
- {
- if((dir != 'f') && (dir != 'b'))
- return;
- pwheel->dir = dir;
- pwheel->current++;
- if (pwheel->current >= pwheel->period)
- pwheel->current = 0;
- if (pwheel->current < pwheel->duty)
- MotorControl(pwheel->motor, pwheel->dir);
- if(pwheel->current >= pwheel->duty)
- MotorControl(pwheel->motor, 's');
- }
-
- static void WheelStop (struct wheel *pwheel)
- {
- if(pwheel->dir == 's')
- return;
- pwheel->dir = 's';
- pwheel->current = pwheel->period;
- MotorControl(pwheel->motor, 's');
- }
-
- // WheelDriveЪЧИљОнЙЄзїзДЬЌРДЩшЖЈаЁГЕЕФЧАНјЁЂКѓЭЫЁЂзѓзЊЁЂгвзЊМАЭЃжЙЃЌ
- // жївЊЪЧВйПиWheelRunКЭWheelStopСНИіКЏЪ§ЪЕЯжЫљашвЊЕФЙІФмЁЃ
- static void WheelDrive()
- {
- switch(state)
- {
- case FORWARD:
- WheelRun(&wheel_right, 'f');
- WheelRun(&wheel_left, 'f');
- break;
-
- case BACKWARD:
- WheelRun(&wheel_right, 'b');
- WheelRun(&wheel_left, 'b');
- break;
-
- case LEFT:
- WheelRun(&wheel_right, 'f');
- WheelStop(&wheel_left);
- break;
-
- case RIGHT:
- WheelStop(&wheel_right);
- WheelRun(&wheel_left, 'f');
- break;
-
- case STOP:
- WheelStop(&wheel_right);
- WheelStop(&wheel_left);
- break;
-
- case U_TURN:
- WheelRun(&wheel_right, 'b');
- WheelRun(&wheel_left, 'f');
- break;
- }
- }
- // WheelControlЭтВПВЩгУУќСюЗНЪНИФБфГЕЕФЙЄзїзДЬЌ
- void WheelControl(char cmd)
- {
- switch(cmd)
- {
- case 'f':
- state = FORWARD;
- break;
-
- case 'b':
- state = BACKWARD;
- break;
-
- case 'l':
- state = LEFT;
- break;
-
- case 'r':
- state = RIGHT;
- break;
-
- case 's':
- state = STOP;
- break;
-
- case 'u':
- state = U_TURN;
- break;
- }
- }
-
- void SpeedChange(unsigned char mode)
- {
- if (mode)
- {
- wheel_left.duty = 35;
- wheel_right.duty = 35;
- }
- else
- {
- wheel_left.duty = 15;
- wheel_right.duty = 15;
- }
- }
- detection.c
-
- #include "stm32f10x.h"
- #include <stdio.h>
-
- static void UpdateDistance(void);
- extern void SpeedChange(unsigned char mode);
- extern int SetTimer(unsigned short duration, void (*proc)(void) ,int reload);
-
- static unsigned char TIM2CaptureFlag; // ЪфШыВЖЛёзДЬЌ
- unsigned int curDis = 0xffff; // ЕБЧАОрРы
- unsigned char SYSTEM_MODE = 0; // ФЃЪНбЁдё 0--бМЃБмеЯЃЌ1--здгЩБмеЯ
- char InfraredState;
-
- void DetectionInit()
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- TIM_ICInitTypeDef TIM_ICInitStruct;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC, ENABLE);
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
-
- // HC-SR04 Echo PA0 (TIM2_CH1ЕФIC1)
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- GPIO_ResetBits(GPIOA, GPIO_Pin_0);
-
- // HC-SR04 Trig PA4
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- GPIO_ResetBits(GPIOA, GPIO_Pin_4);
-
- // LED
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_Init(GPIOC, &GPIO_InitStructure);
- GPIO_ResetBits(GPIOC, GPIO_Pin_13);
-
- // зѓКьЭт PB5ЃЌжаКьЭт PB6ЃЌгвКьЭт PB7
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
-
- // ЙІФмбЁдё PB8
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- GPIO_ResetBits(GPIOB, GPIO_Pin_8);
-
- // TIM2
- TIM_TimeBaseStructure.TIM_Period = 0xffff; // жидиМЦЪ§жЕзюДѓ
- TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1; // МЦЪ§жмЦк1us
- TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // ВЛЗжЦЕ
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // ЯђЩЯМЦЪ§
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
-
- //TIM2_CH1ЪфШыВЖЛёГѕЪМЛЏ
- TIM_ICInitStruct.TIM_Channel = TIM_Channel_1; // ЪЙгУЭЈЕР1
- TIM_ICInitStruct.TIM_ICFilter = 0x02; // ВЛТЫВЈ
- TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1; // ВЛЗжЦЕ
- TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;// жБНггГЩфЕНIC1
- TIM_ICInit(TIM2, &TIM_ICInitStruct);
-
- // TIM2 NVICХфжУ
- NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure);
-
- TIM_ITConfig(TIM2, TIM_IT_CC1, ENABLE);
- TIM_Cmd(TIM2, ENABLE);
-
- // 100msИќаТвЛДЮОрРы
- SetTimer(200, UpdateDistance, 1);
- }
-
- char DetectionGet()
- {
- InfraredState = (GPIOB->IDR >> 5) & 0x7; // ЕЭШ§ЮЛЗжБ№ЮЊPB5ЁЂPB6ЁЂPB7ЕФжЕ
- return InfraredState;
- }
-
- void TIM2_IRQHandler(void)
- {
- if((TIM2CaptureFlag & 0x10) == 0) // ЪЧЗёЪЧаТЕФвЛДЮВЖЛё
- {
- TIM2CaptureFlag |= 0x10; // ВЖЛёЕНвЛДЮЩЯЩ§би
- TIM_SetCounter(TIM2, 0);
- TIM_OC1PolarityConfig(TIM2, TIM_ICPolarity_Falling); // ЩшжУЮЊЯТНЕбиВЖЛё
- }
- else
- curDis = 0.017 * TIM_GetCapture1(TIM2);
- TIM_ClearITPendingBit(TIM2, TIM_IT_CC1); // ЧхГ§жаЖЯБъжОЮЛ
- }
-
- static void Delay20Us()
- {
- int i = 0;
- for (; i <= 231; i++);
- }
-
- static void UpdateDistance()
- {
- TIM2CaptureFlag = 0;
- TIM_OC1PolarityConfig(TIM2, TIM_ICPolarity_Rising);
-
- // Trig
- GPIO_SetBits(GPIOA, GPIO_Pin_4);
- Delay20Us();
- GPIO_ResetBits(GPIOA, GPIO_Pin_4);
-
- // ЯЕЭГФЃЪНбЁдё
- if (GPIOB->IDR & 0x100)
- SYSTEM_MODE = 1;
- else
- SYSTEM_MODE = 0;
- SpeedChange(SYSTEM_MODE);
- }
- track.c
- #include "stm32f10x.h"
- #include <stdio.h>
-
- extern void WheelControl(char cmd);
-
- enum {OUT, R, M, MR, L, LR, LM, LMR};
- extern unsigned int curDis; // ЕБЧАВтОрНсЙћ
- static char lastDetect = M; // ЩЯвЛДЮЕФКьЭтЬНВтНсЙћ
- static char uTurnFLag = 0; // ДѓзЊЭфБъМЧ
-
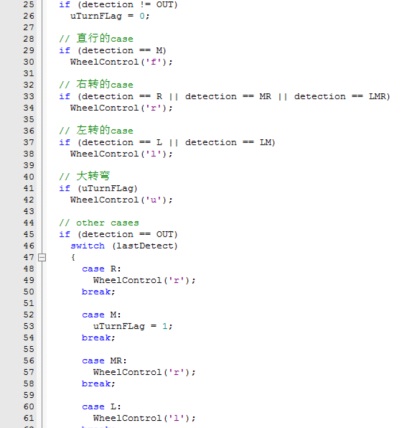
- void TrackRun(char detection)
- {
- if (curDis <= 15)
- GPIO_SetBits(GPIOC, GPIO_Pin_13);
- else
- GPIO_ResetBits(GPIOC, GPIO_Pin_13);
-
- // ЕБЧАОрРыаЁгк15cmЃЌЭЃГЕ
- if (curDis <= 15)
- {
- WheelControl('s');
- return;
- }
-
- if (detection != OUT)
- uTurnFLag = 0;
-
- // жБааЕФcase
- if (detection == M)
- WheelControl('f');
-
- // гвзЊЕФcase
- if (detection == R || detection == MR || detection == LMR)
- WheelControl('r');
-
- // зѓзЊЕФcase
- if (detection == L)
- WheelControl('l');
-
- // ДѓзЊЭф
- if (uTurnFLag)
- WheelControl('u');
-
- // other cases
- if (detection == OUT)
- switch (lastDetect)
- {
- case R:
- WheelControl('r');
- break;
-
- case M:
- uTurnFLag = 1;
- break;
-
- case MR:
- WheelControl('r');
- break;
-
- case L:
- WheelControl('l');
- break;
-
- case LM:
- WheelControl('l');
- break;
- }
-
- if (detection != OUT)
- lastDetect = detection;
- }
- avoid.c
- #include "stm32f10x.h"
-
- extern void WheelControl(char cmd);
-
- extern unsigned int curDis;
-
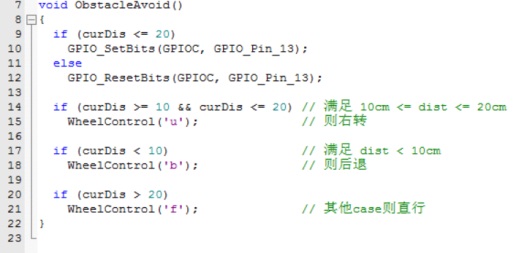
- void ObstacleAvoid()
- {
- if (curDis <= 20)
- GPIO_SetBits(GPIOC, GPIO_Pin_13);
- else
- GPIO_ResetBits(GPIOC, GPIO_Pin_13);
-
- if (curDis >= 10 && curDis <= 20) // Тњзу 10cm <= dist <= 20cm
- WheelControl('u'); // дђгвзЊ
-
- if (curDis < 10) // Тњзу dist < 10cm
- WheelControl('b'); // дђКѓЭЫ
-
- if (curDis > 20)
- WheelControl('f'); // ЦфЫћcaseдђжБаа
- }
- car.c
- #include "stm32f10x.h"
- #include <stdio.h>
-
- static void CarRun (void);
- extern void WheelInit(void);
- extern char DetectionGet(void);
- extern void DetectionInit(void);
- extern void ObstacleAvoid(void);
- extern void TrackRun(char detection);
- extern int SetTimer(unsigned short duration, void (*proc)(void) , int reload);
-
- extern unsigned char SYSTEM_MODE;
-
- void CarInit()
- {
- WheelInit(); // ГЕТжГѕЪМЛЏ
- DetectionInit(); // ДЋИаЦїГѕЪМЛЏЃЈКьЭтКЭГЌЩљВЈЃЉ
- SetTimer(2, CarRun, 1); // УП1msжДаавЛДЮCarRun
- }
-
- static void CarRun()
- {
- char det = DetectionGet();
- if (SYSTEM_MODE)
- ObstacleAvoid();
- else
- TrackRun(det);
- }
ЕзАхЭјЩЯЙКЕУЃЌММЪѕЮФЕЕЁЂдДТыдкИНМўжа
ШЋВПзЪСЯ51heiЯТдиЕижЗЃК
 Smart_Car_Lib_Ver.7z
(191.29 KB, ЯТдиДЮЪ§: 203)
Smart_Car_Lib_Ver.7z
(191.29 KB, ЯТдиДЮЪ§: 203)
 ММЪѕБЈИц.docx
(1.09 MB, ЯТдиДЮЪ§: 123)
ММЪѕБЈИц.docx
(1.09 MB, ЯТдиДЮЪ§: 123)
 аЁГЕСЌЯпnew.pdf
(855.94 KB, ЯТдиДЮЪ§: 147)
аЁГЕСЌЯпnew.pdf
(855.94 KB, ЯТдиДЮЪ§: 147)
|




 [ИДжЦСДНг]
[ИДжЦСДНг]

 ЙмРэдБQQ:125739409;ММЪѕНЛСїQQШК281945664
ЙмРэдБQQ:125739409;ММЪѕНЛСїQQШК281945664



















 QQКУгбКЭШК
QQКУгбКЭШК QQПеМф
QQПеМф ЬкбЖЮЂВЉ
ЬкбЖЮЂВЉ ЬкбЖХѓгб
ЬкбЖХѓгб ЪеВи
ЪеВи ЬдЬћ
ЬдЬћ ЖЅ
ЖЅ ВШ
ВШ