|
 本来是写在CSDN上的,,这里也发一份: 本来是写在CSDN上的,,这里也发一份:
主要利用esp8266,结合oled,舵机和LED进行控制,利用的是tcp协议,通过连接热点实现对于小灯和舵机的亮灭,亮度,转速和控制,并在oled上实时显示。共耗时半天,希望都能有所收获
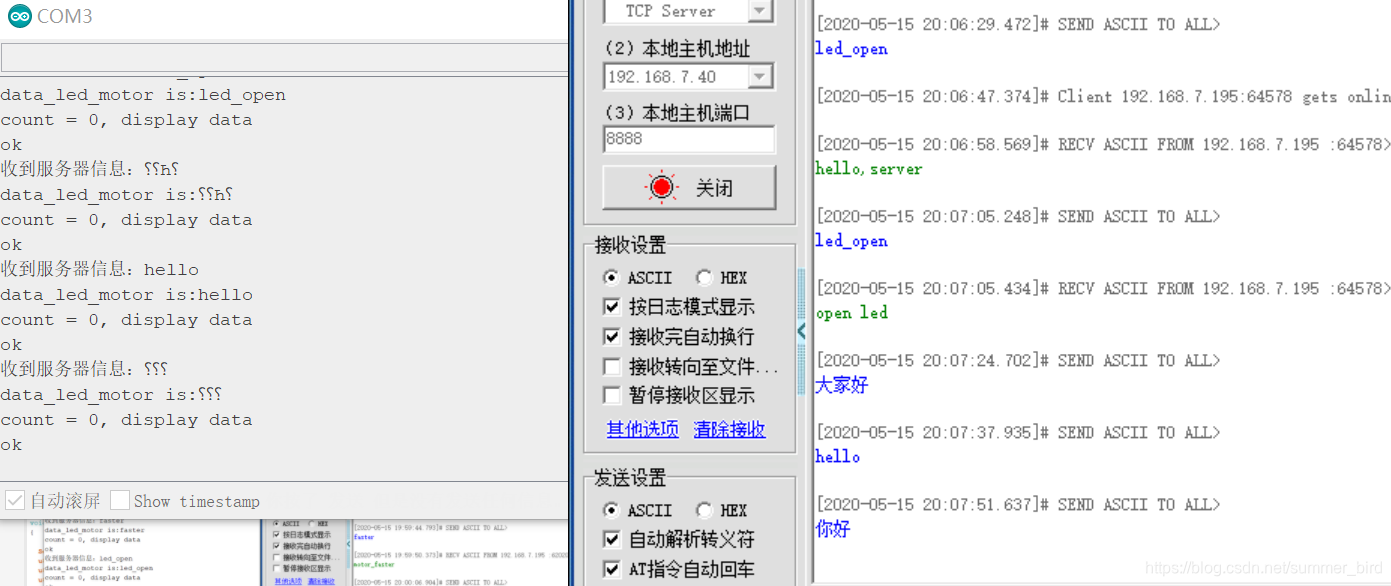
下面是网络调试助手和arduino的端串口的收发消息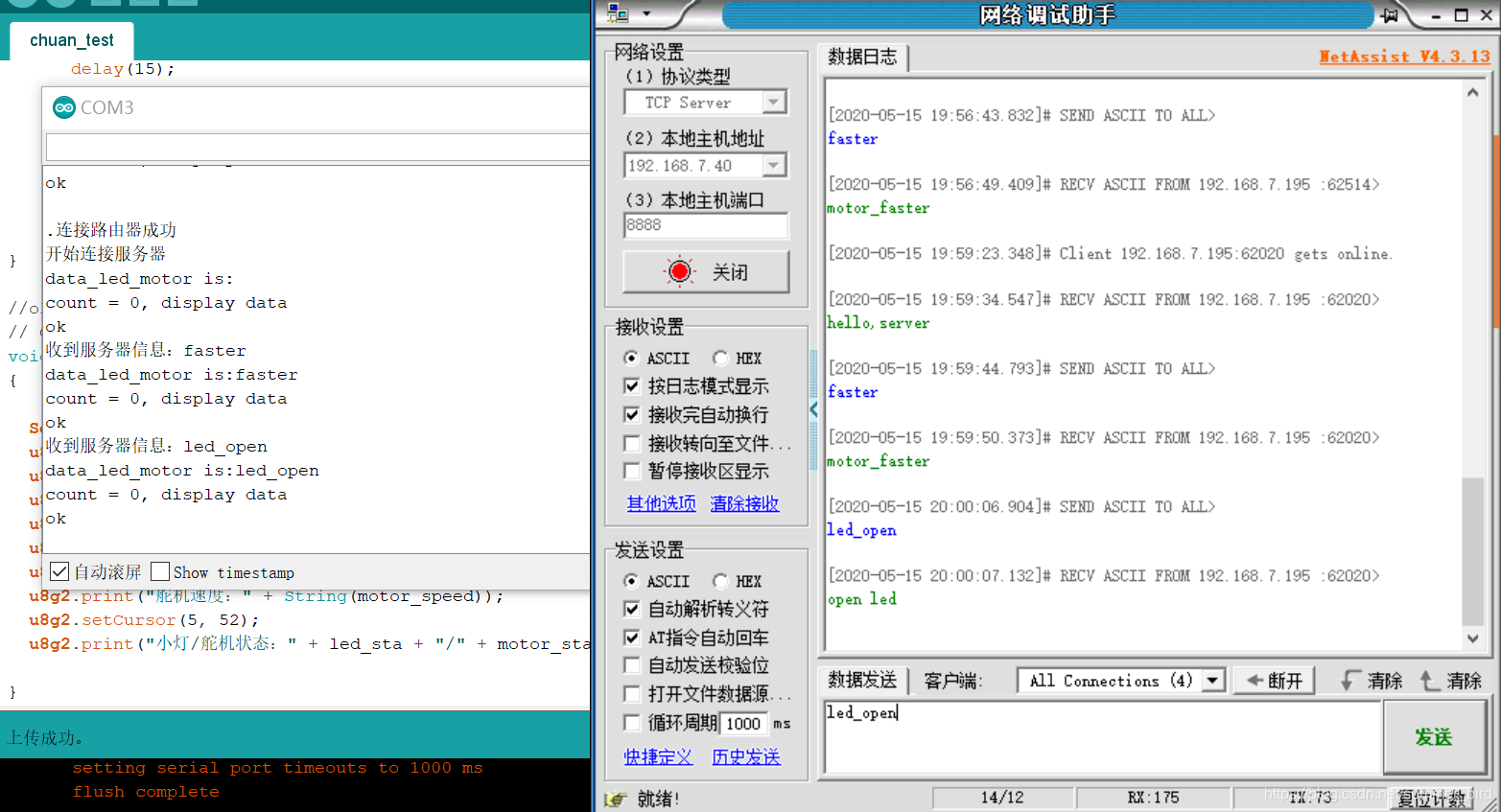
然后是一些调试过程的实拍记录:
连接上路由器: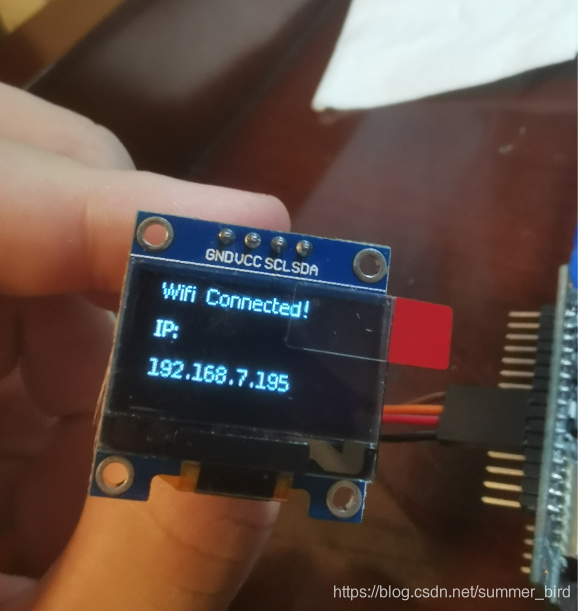
初始界面
显示制作人: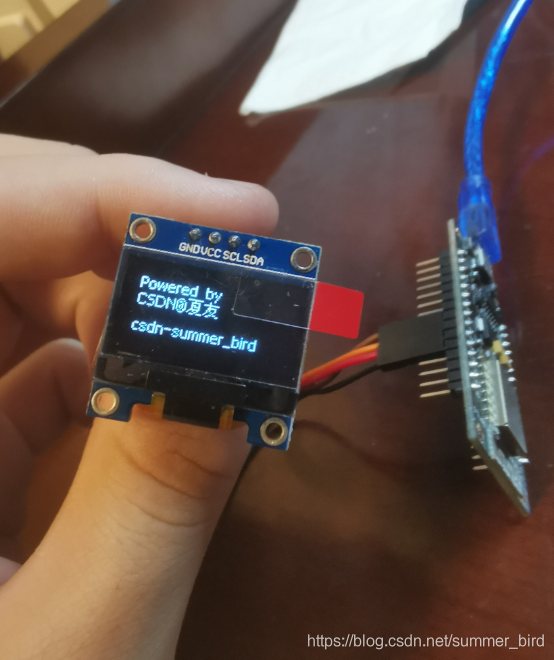
发送数据打开小灯: 下面是代码可供大家调试 - /*************************************************************
- ESP8266 with 0.96inch OLED 引脚
- VCC <---> VCC
- GND <---> GND
- SDA <---> SDA(2) D4
- SCL <---> SCL(14) D5
- *************************************************************/
- /*仅仅针对四个引脚和oled屏显示*/
- //针对串口显示oled屏幕
- /*****************oled设置库 *****************/
- #include <ArduinoJson.h>
- #include <U8g2lib.h>
- #include <Wire.h>
- #include <Ticker.h>
- /*****************网络设置库 *****************/
- #include <ESP8266WiFi.h>
- #include <WiFiClient.h>
- /*****************舵机库 *****************/
- #include <Servo.h>
- Servo myservo; // 定义舵机对象,最多八个
- /*****************网络设置项 *****************/
- const char *STAssid ="xxx"; //需要连接路由器的名称
- const char *STApassword="xxxx"; //路由器的密码
- const char *host= "xxxx"; /本地服务器ip
- const int httpPort = 8888; //服务器端口
- WiFiClient client; //声明客户端对象
- bool is=0; //用来做连接到服务器后,仅发送一次问候语
- int led=13; //灯io,D7
- int led_light=12; //用来调节亮度,D6,输出PWM波
- float dutycycle=512/2; /* 设置初始占空比为50% /2*/
- int motor_speed=1; //定义舵机的转速
- int pos = 0; // 定义舵机转动位置
- boolean flag = true; //用来控制oled屏幕的刷新
- //oled设置
- // JSON
- DynamicJsonBuffer jsonBuffer(256); // ArduinoJson V5
- // 显示屏 如果引脚不同需要在这里修改
- U8G2_SSD1306_128X64_NONAME_F_HW_I2C u8g2(U8G2_R0, /* reset=*/ U8X8_PIN_NONE, /* clock=*/ 14, /* data=*/ 2);
- // B 站 API 网址: follower, view, likes
- String NAME = "夏友"; //改成自己的名字
- String UID = "xxxxxxxxxx"; //改成自己的UID
- //小灯、电机状态设置
- String led_sta="off";
- String motor_sta="off";
- void setup() {
- Serial.begin(115200);
- Serial.println("");
- //LED初始化
- pinMode(13,OUTPUT);
- digitalWrite(13,0);
- analogWrite(led_light, dutycycle); /* 设置初始占空比为50% /2*/
- //WiFi初始化
- WiFi.mode(WIFI_STA); //设置为STA模式
- WiFi.begin(STAssid, STApassword); //配置连接信息,开始连接
- //运行自定义函数,在未连接到路由器的过程中,打印输出......,直到连接成功
- gotoWifi();
- // OLED 初始化,显示连接WiFi
- u8g2.begin();
- u8g2.enableUTF8Print();
- u8g2.clearDisplay();
- u8g2.setFont(u8g2_font_wqy12_t_gb2312a);
- u8g2.setCursor(10, 10);
- u8g2.println("Wifi connecting to ");
- u8g2.setCursor(10, 30);
- u8g2.println(STAssid);
- u8g2.setCursor(10, 50);
- while( WiFi.status() != WL_CONNECTED ){
- delay(500);
- u8g2.println("。");
- u8g2.println(" ");
- }
- //delay(1000);
- u8g2.sendBuffer();
- delay(5000); //初始化延时5秒钟之后准备显示第二组画面
-
- //连接WiFi成功后的oled路由器显示
- u8g2.clearDisplay();
- u8g2.setCursor(10,10);
- u8g2.println("Wifi Connected!");
- u8g2.setCursor(10,30);
- u8g2.println("IP:");
- u8g2.setCursor(10,50);
- u8g2.println(WiFi.localIP() );
-
- Serial.println("连接路由器成功");
- //此时已经连接到路由器,可以开始连接远程服务器
- lianjie();
- u8g2.sendBuffer();
- delay(5000); //初始化延时5秒钟之后准备显示第二组画面
-
- //第三组画面准备显示
- u8g2.clearDisplay();
- u8g2.setFont(u8g2_font_wqy12_t_gb2312a);
- u8g2.setCursor(10, 19);
- u8g2.print("Powered by");
- u8g2.setCursor(10, 31);
- u8g2.print("CSDN@夏友");
- u8g2.setFont(u8g2_font_wqy12_t_gb2312a);
- u8g2.setCursor(10, 50);
- u8g2.print("csdn-summer_bird");
- u8g2.sendBuffer();
- delay(5000); //初始化延时5秒钟之后准备显示第二组画面
- //再次初始化
- u8g2.setFont(u8g2_font_wqy12_t_gb2312b);
- }
- void loop() {
- /****************检测WiFi连接状态****************/
- if (WiFi.status() != WL_CONNECTED) {
- WiFi.disconnect();
- WiFi.begin(STAssid, STApassword);
- gotoWifi();
- }
- else{
- if (!client.connected()) { //如果没有连接到服务器
- lianjie();
- return;
- }
- else{ //否则,就是连接到服务器
- if(is==0){
- client.print("hello,server");
- is=1;
- }
- }
- }
- /*针对信息对oled屏幕上的信息进行刷新并且显示*/
- String data_led_motor=Read_Tcp(); //记录LED和舵机的数据
- Tcp_Handler(data_led_motor); //读取服务器信息,并处理
-
- while(flag) //oled数据显示
- {
- Serial.print("data_led_motor is:");
- Serial.println(data_led_motor);
- // display data
- Serial.println("count = 0, display data");
- u8g2.firstPage();
- do
- {
- display(data_led_motor, led_sta, motor_sta); //分别输出占空比,小灯亮度,舵机强度
- } while (u8g2.nextPage());flag=false;
- }
- //Tcp_Handler(data_led_motor); //读取服务器信息,并处理************************
- }
- //读取服务器信息,返回String类型
- String Read_Tcp(){
- String data = "";
- while (client.available() > 0){
-
- char inchar = client.read(); //
- data += char(inchar);
- delay(10);
- flag=true; //修改
- }
- return data;
- }
- //处理服务器信息
- void Tcp_Handler(String data){
- if(data!=""){
- Serial.print("收到服务器信息:");
- Serial.println(data);
- //数据接收处理
- /*舵机数据接收处理函数*/
- if(data=="led_open"){
- digitalWrite(13,1);
- led_sta="on";
- client.print("open led");
- }
- else if(data=="led_close"){
- digitalWrite(13,0);
- led_sta="off";
- client.print("close led");
- }
- else if(data=="more"){
- more();
- client.print("led_light_more");
- }
- else if(data=="lower"){
- lower();
- client.print("led_light_lower");
- }
- /*舵机数据接收处理函数*/
- else if(data=="motor_open"){
- motor_speed=1;
- driver(motor_speed);
- motor_sta="on";
- client.print("open motor");
- }
- else if(data=="motor_close"){
- motor_speed=0;
- driver(motor_speed);
- motor_sta="off";
- client.print("close motor");
- }
- else if(data=="faster"){
- driver(motor_speed++);
- client.print("motor_faster");
- }
- else if(data=="slower"){
- driver(motor_speed--);
- client.print("motor_slower");
- }
- }
- }
- //连接路由器
- void gotoWifi(){
- while (WiFi.status() != WL_CONNECTED) {
- delay(500);
- Serial.print(".");
- }
- }
- //连接服务器
- void lianjie() {
- Serial.println("开始连接服务器");
- client.connect(host, httpPort);
- delay(1000);
- }
- //小灯亮度提高
- void more(){
- dutycycle+=100;
- if(dutycycle > 1023) {dutycycle = 1023;Serial.print("light_max");}/* 限制占空比至 1023,并提出警告 */
- led_sta="on";
- Serial.print("Duty Cycle: "); Serial.println(dutycycle/1024*100);
- analogWrite(led_light, dutycycle);
- delay(1000);
- }
- //小灯亮度降低
- void lower(){
- dutycycle-=100;
- if(dutycycle < 0) {dutycycle = 0;led_sta="off";Serial.print("light_min");}/* 限制占空比至 1,并提出警告 */
- //小灯状态需要时刻监视
- Serial.print("Duty Cycle: "); Serial.println(dutycycle/1024*100);
- analogWrite(led_light, dutycycle);
- delay(1000);
- }
- //舵机转速处理函数
- // 0到180旋转舵机,每次延时15毫秒
- void driver(int motor_speed)
- {
- //速度控制函数
- if(motor_speed>10){motor_speed = 10;motor_sta="on";Serial.print("speed_max");}/* 限制转速0-10,并提出警告 */
- else if(motor_speed<0){motor_speed = 0;motor_sta="off";Serial.print("speed_min");}/* 限制转速0-10,并提出警告 */
-
- for(pos = 0; pos < 180; pos += motor_speed)
- {
- myservo.write(pos);
- delay(15);
- }
- // 180到0旋转舵机,每次延时15毫秒
- for(pos = 180; pos>=1; pos-=motor_speed)
- {
- myservo.write(pos);
- delay(15);
- }
- }
-
- //oled显示函数
- // OLED 显示数据
- void display(String data_led_motor, String led_sta, String motor_sta)
- {
-
- Serial.println("ok");
- u8g2.clearDisplay();
- u8g2.setCursor(5, 11);
- u8g2.print("接收数据:" + data_led_motor);
- u8g2.setCursor(5, 27);
- u8g2.print("pwm占空比:" + String(dutycycle/1024*100));
- u8g2.setCursor(5, 41);
- u8g2.print("舵机速度:" + String(motor_speed));
- u8g2.setCursor(5, 54);
- u8g2.print("小灯/舵机状态:" + led_sta + "/" + motor_sta);
-
- }
源程序我也放到了网盘,有需要的自取
网址:https://pan.baidu.com/s/14K37j_AizKk3m3WKlg7p9A
提取码:xwoj
|






