1 简述
想做一个能观察我的VGA小车的姿态角度的系统,一直在网上找相对应的模块。想找个性价比高点的,同时精度高点的。最后在淘宝上找到一款JY901模块。这个模块能XY动态精度0.1度,静态能到0.05度。Z轴的精度为1度。一般一百多元的价格,能到这个精度的还是很少的。果断入手一个来测试下性能。下图给大家看下这个模块
模块的体积很小,很方便能贴在我的PCB板上。不过这个模块的Z轴不能受磁场干扰。因此只能远离我的VGA小车的电机,我把这个模块和我的板子一起用杆子撑起来,远离这些干扰(我是做的一根30CM的杆)。最后测试效果还可以的。
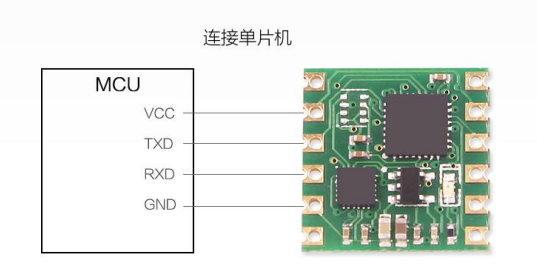
2 连接方式
这个JY901连接是很方便的。供电3.3-5v。直接接我单片机上电压就行了。接线的方式如下:
3 串口读取程序
串口读取简单分为两个部分。1、配置单片机的UART口。2、数据处理部分了。下面和大家一一分享。
3.1配置单片机的UART口
我使用的是UART2,使用时钟、模式、速度等。都在下面大家参考下
void Initial_UART2(unsigned long baudrate)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2 | RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = baudrate;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure);
USART_ITConfig(USART2, USART_IT_TXE, DISABLE);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
USART_ClearFlag(USART2,USART_FLAG_TC);
USART_Cmd(USART2, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 8;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
3.2 数据处理
3.2.1数据接收
编写思维是这样的。当我的UART2接受到数据后就会存在我的ucRxBuffer[250]里,根据这个JY901的通讯协议。我就开始判断我接受的数据里面是不是有55包头的数据。然后我还加了一个计数ucRxCnt。加在一起我会判断。整个数据的长度是不是11位数据。最后,根据商家给的通讯协议里。50代表时间、51加速度、52角速度、53角度、54磁场等,我再判断我的这11位数据的第二位是上面的哪个值。就可以了。
void CopeSerial2Data(unsigned char ucData)
{
static unsigned char ucRxBuffer[250];
static unsigned char ucRxCnt = 0;
LED_REVERSE();
ucRxBuffer[ucRxCnt++]=ucData;
if (ucRxBuffer[0]!=0x55
{
ucRxCnt=0;
return;
}
if (ucRxCnt<11) {return;
else
{
switch(ucRxBuffer[1])
{
case 0x50: memcpy(&stcTime,&ucRxBuffer[2],8);break
case 0x51: memcpy(&stcAcc,&ucRxBuffer[2],8);break;
case 0x52: memcpy(&stcGyro,&ucRxBuffer[2],8);break;
case 0x53: memcpy(&stcAngle,&ucRxBuffer[2],8);break;
case 0x54: memcpy(&stcMag,&ucRxBuffer[2],8);break;
case 0x55: memcpy(&stcDStatus,&ucRxBuffer[2],8);break;
case 0x56: memcpy(&stcPress,&ucRxBuffer[2],8);break;
case 0x57: memcpy(&stcLonLat,&ucRxBuffer[2],8);break;
case 0x58: memcpy(&stcGPSV,&ucRxBuffer[2],8);break;
case 0x59: memcpy(&stcQ,&ucRxBuffer[2],8);break;
}
ucRxCnt=0
}
}
3.2.2 数据解算
解算这块呢,最关键的是就是根据商家给的公式去解算。我上面获取的16进制的数据。按照公式套进去就可以了。 printf("Time:20%d-%d-%d %d:%d:%.3f\r\n",stcTime.ucYear,stcTime.ucMonth,stcTime.ucDay,stcTime.ucHour,stcTime.ucMinute,(float)stcTime.ucSecond+(float)stcTime.usMiliSecond/1000); delay_ms(10);
printf("Acc:%.3f %.3f %.3f\r\n",(float)stcAcc.a[0]/32768*16,(float)stcAcc.a[1]/32768*16,(float)stcAcc.a[2]/32768*16);
delay_ms(10);
printf("Gyro:%.3f %.3f %.3f\r\n",(float)stcGyro.w[0]/32768*2000,(float)stcGyro.w[1]/32768*2000,(float)stcGyro.w[2]/32768*2000);
delay_ms(10);
printf("Angle:%.3f %.3f %.3f\r\n",(float)stcAngle.Angle[0]/32768*180,(float)stcAngle.Angle[1]/32768*180, (float)stcAngle.Angle[2]/32768*180);
delay_ms(10);
printf("Mag:%d %d %d\r\n",stcMag.h[0],stcMag.h[1],stcMag.h[2]);
delay_ms(10);
printf("Pressure:%ld Height%.2f\r\n",stcPress.lPressure,(float)stcPress.lAltitude/100);
delay_ms(10);
printf("DStatus:%d %d %d %d\r\n",stcDStatus.sDStatus[0],stcDStatus.sDStatus[1],stcDStatus.sDStatus[2],stcDStatus.sDStatus[3]);
delay_ms(10);
printf("Longitude:%ldDeg%.5fm Lattitude:%ldDeg%.5fm\r\n",stcLonLat.lLon/10000000,(double)(stcLonLat.lLon % 10000000)/1e5,stcLonLat.lLat/10000000,(double)(stcLonLat.lLat % 10000000)/1e5);
delay_ms(10);
printf("GPSHeight:%.1fm GPSYaw:%.1fDeg GPSV:%.3fkm/h\r\n",(float)stcGPSV.sGPSHeight/10,(float)stcGPSV.sGPSYaw/10,(float)stcGPSV.lGPSVelocity/1000);
delay_ms(10);
printf("Four elements:%.5f %.5f %.5f %.5f\r\n\r\n",(float)stcQ.q[0]/32768,(float)stcQ.q[1]/32768,(float)stcQ.q[2]/32768,(float)stcQ.q[3]/32768);
delay_ms(10);
最后给大家分享下我写的这个代码
 STM32Core串口JY901接串口助手.7z
(669.13 KB, 下载次数: 30)
STM32Core串口JY901接串口助手.7z
(669.13 KB, 下载次数: 30)
https://pan.baidu.com/s/1Wp3A4_84FjCUURahqlVK6A
|









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

