|
USART的概述 2.1.1 什么是USART?USART的作用? USART:通用同步异步收发器。 USART的作用:能够灵活地与外部设备进行全双工数据交换 2.1.2 USART的特征 <1> 全双工异步通信 <2> 可配置为 16 倍过采样或 8 倍过采样 <3> 小数波特率发生器系统 <4> 数据字长度可编程( 8 位或 9 位) <5> 停止位可配置 - 支持 1 或 2 个停止位 <6> 发送器和接收器具有单独使能位 <7>传输检测标志: — 接收缓冲区已满 — 发送缓冲区为空 — 传输结束标志 <8>十个具有标志位的中断源: — CTS 变化 — LIN 停止符号检测 — 发送数据寄存器为空 — 发送完成 — 接收数据寄存器已满 — 接收到线路空闲 — 溢出错误 — 帧错误 — 噪声错误 — 奇偶校验错误 任何USART双向通信均需要至少两个引脚: 接收数据输入引脚 (RX) 发送数据引脚输出 (TX) 正常 USART 模式下 发送或接收前保持空闲线路 起始位 数据(字长 8 位或 9 位),最低有效位在前 用于指示帧传输已完成的 0.5 个、 1 个、 1.5 个、 2 个停止位 TX引脚在起始位工作期间处于低电平状态。在停止位工作期间处于高电平状态。 2.2 USART的框架 2.2.1发送数据过程

放大后的各个部分: GPIO部分: 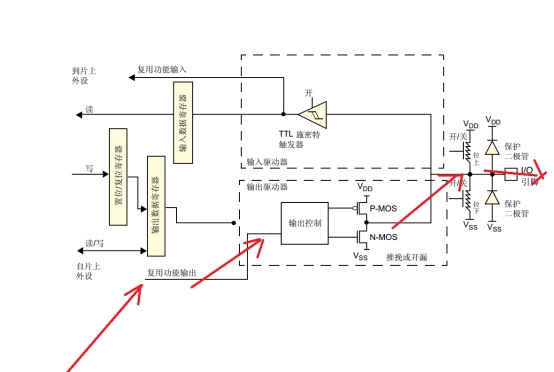
映射部分: 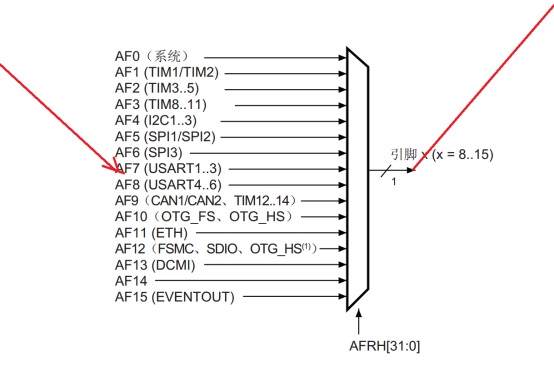
USART部分: 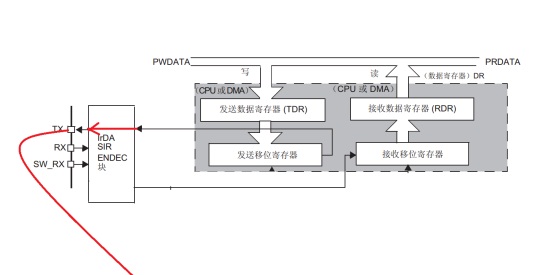
2.2.2接收数据过程
放大后的各个部分: GPIO部分: 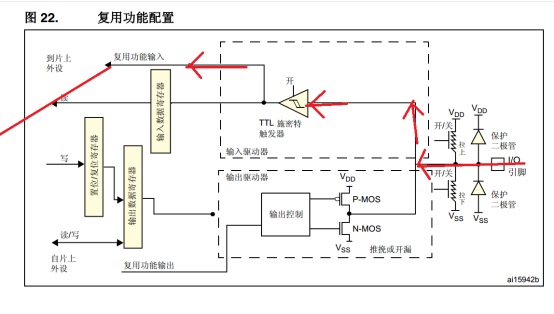
映射部分: 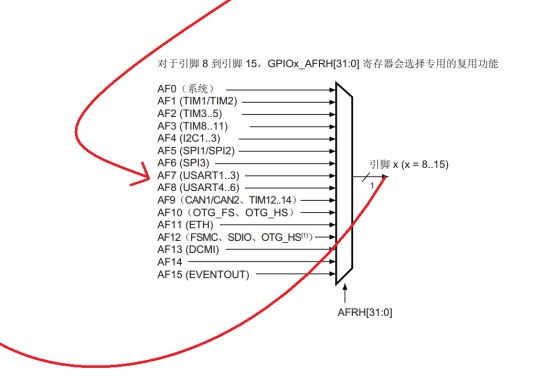
USART部分: 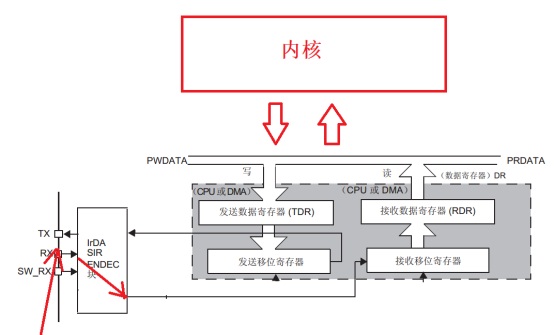
2.2.3 发送与接收过程解读 GPIO要配为复用功能 复用与通用的区别:这里的外设就是USART 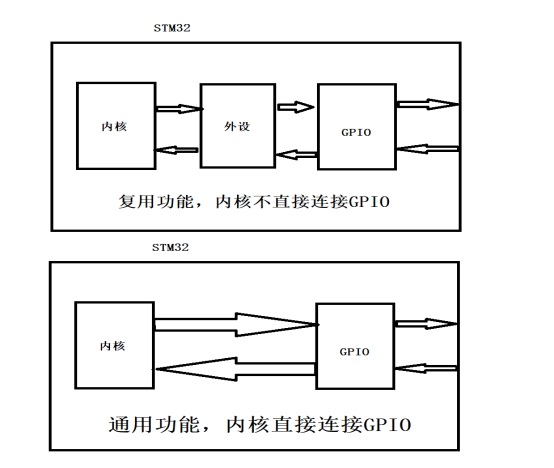
发送过程: - 内核把数据交给USART的发送数据寄存器(TDR)
- TDR通过并行总线,一次性写入到发送移位寄存器中
- 发送移位寄存器移位一位一位的传输数据,直到数据发送完毕。
- 当发送移位寄存器没有数据时,TDR才把数据一次写入。
接收过程: - 接收移位寄存器从外部获取每一位数据
- 当移位数据寄存器挤满8位或9位数据时,通过并行总线,一次发送到接收数据寄存器(RDR)
- 只能等移位寄存器凑够8位或9位数据时,才会把数据发送到RDR,内核此时才能读取到正确的数据。
注意: 发送数据寄存器(TDR)与接收数据寄存器(RDR)是两个寄存器,写代码时只有DR,DR代表发送数据寄存器还是接收数据寄存器,取决于所在函数是接收还是发送。 2.2.4 USART映射解读 查看原理图,可知USART1的发送TX与接收RX对应引脚分别为PA9\PA10。 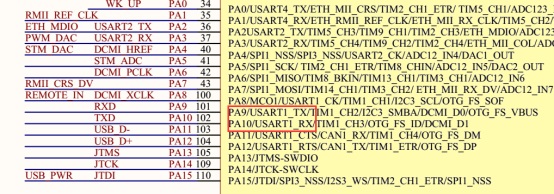
这也是M3默认的映射引脚。 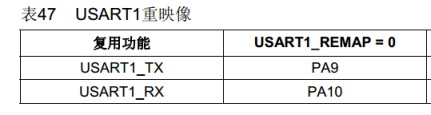
与PA9与PA10可知我们选择的复用寄存器是GPIOx_AFRH 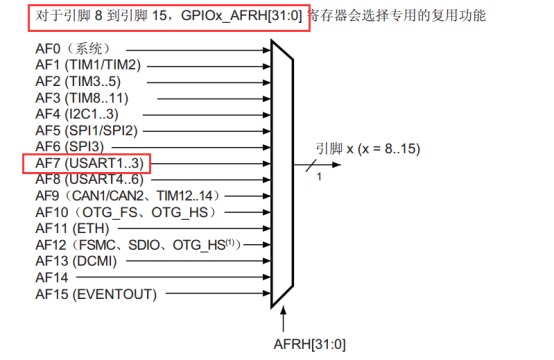
由图可知, - 配置PA9和PA10为复用功能
- 找引脚对应的复用功能寄存器,PA9\PA10对应AFRH寄存器
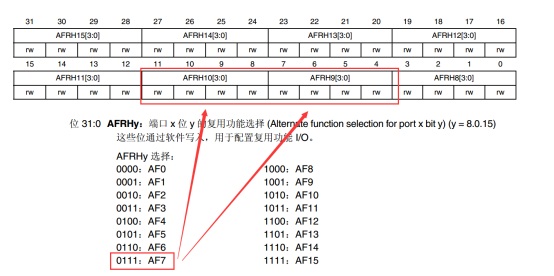
- 在AFRH中找引脚对应控制位,PA9?AFRH9[3:0]、PA10?AFRH10[3:0]
- 通过映射图可知,USART1对应的值为AF7
- 把AF7写入PA9\PA10对应控制位的位置
2.3 USART波特率的配置 2.3.1 配置波特率公式  fCK看USART挂载的外设总线,可知84MHz fCK看USART挂载的外设总线,可知84MHz 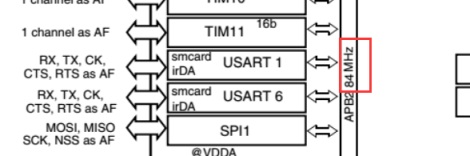
OVER8根据控制寄存器1的位15可知,默认采用16倍过采样,OVER8=0 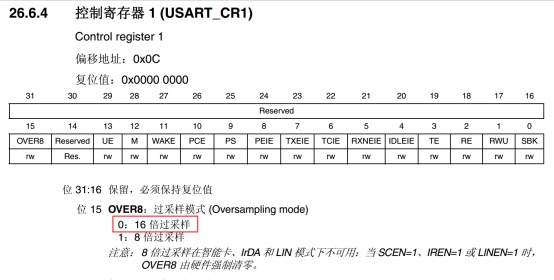
USARTDIV根据下面公式,算得: 
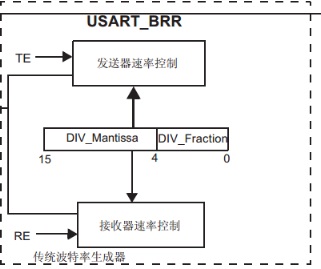

2.3.2 实际配置波特率过程 《1》确定需要配置的波特率、采用默认过采用模式 《2》根据公式1,可求出USARTDIV 《3》USARTDIV是写入到波特率寄存器 (USART_BRR)的浮点数,由于寄存器不能直接写入浮点数,所以需要把整数和小数分开写入到USART_BRR中。 《4》查看寄存器USART_BRR可知,12位控制整数,4位控制小数。 《5》USARTDIV的一个浮点数,进行强制转换为整型,即可获得它的整数部分DIV_Mantissa,最后通过USATRDIV公式,可算出小数部分DIV_Fraction。 《6》在写入整数部分时,整数位要左移4位,因为从位4开始写入整数部分,小数部分直接写入。 2.4 软件设计 2.4.1 USART配置流程 《1》开GPIOA\USART1时钟 《2》配置GPIOA为复用推挽输出 《3》映射PA9与PA10到USART_TX\USART_RX 《4》配置波特率 《5》配置USART模块 2.4.2 USART模块配置 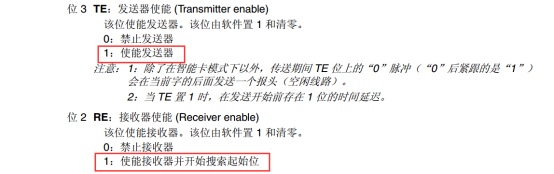

- 使能发送器、接受器
- 使能USATR
- 其他位使用默认值。如:16倍过采样、8位字长、1位停止位等
2.4.3 USAR1初始化函数 2.5 补充 2.5.1 问答 <1>串口是什么?有什么用? 串口是一种串行全双通信接口,同步或异步收发数据,但一般我们只使用异步功能。 常用于与外部设备通信、交互信息。外部若有串口通信接口,就可以与单片机进行通信,如ESP8266模块、RS485模块等。
<2>同步与异步的理解? 同步与异步基于两个设备讨论: 同步:它们有共同的时钟线,由时钟线控制收发 异步:它们没有公共的时钟线,需要双方配置一样的波特率,保证收发的准确。
<3>串行与并行? 串行: 只有一根线或两个根数据线,一次只能收发一位数据。两根线的设计是为了两个设备能同时收发一位数据。 并行: 有多根数据线,一般是8的倍数,假设是8根数据线,一次可传送一个字节(8位)的数据。
<4>单工、半双工、全双工? 单共: 一方只能接收,另一方只能发送,从始至终发送方向不变,单方向固定。例如:广播与收音机。广播只能发出信号,收音机只能接收信号,两者互换不能正常工作。 半双工: 某一时间段,一方发送。另一方接收;另一个时间段,一方接收,另一方发送。双方都可以发送和接收,但不能同时发送或接收。例如:对讲机。 全双工: 双方可以都可以同时收发。例如:电话
<5>波特率是什么?为什么要配置波特率? 一秒钟能传输的二级进制位数。假设9600代表1秒钟可以一次传输9600位。即9.6Kbit。 异步通信双方需要有个约定,发送方以多少速度(波特率)发送数据过去(例如9600),接收方就必须以对应的速度(速度)接收,从而保证读取到正确的数据。
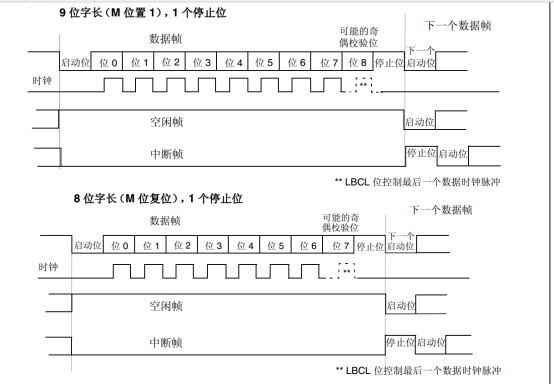
<6>如何保证数据准确发送过去呢? USART串口通信自带有通信协议,一帧数据位10位或11位,常常使用10位作为一帧数据。 一帧数据的构成: - 1个启动位(低电平)
- 数据帧(8位或9位,如果开启奇偶校验,最高位是奇偶检验位,位7或位8,但是一般不开启)
- 停止位(高电平,0.5位、1位、1.5位、2位,一般选1位停止位)
- 综上,一般串口一帧数据为10位(1个启动位、8个数据位、1个停止位)
<7>知识领悟 模块学习心得: - 掌握基本概念
- 理解并记住模块的特性
- 模块框图的工作流程,信号走向,逻辑(重点)
- 看懂模块的时序图,理解其他相关知识
- 会配置寄存器(即使上面的不是很理解,但是尽量理解)
| 












 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

