1 介绍
自己在研究一个题目,就是如何把MPU6050输出的加速度和角速度换算成角度。所以我想在市面上找一个MPU6050,可以自己输出的角度的,这样我就能做一个对比了。同时,能够把IIC引脚留出来的方便我自己开发MPU6050芯片。我在淘宝上找到了一款JY61模块。它内置的是MPU6050芯片。串口直接输出的很简单。给大家看下图片:

JY61
2 MPU6050的工作过程
MPU6050 IMU在单芯片上集成了一个3轴加速度计和一个3轴陀螺仪。陀螺仪沿X、Y和Z轴测量角位置随时间的旋转速度或变化率。它使用MEMS技术和科里奥利效应进行测量。陀螺仪的输出以每秒度数为单位,因此为了获得角度位置,我们只需要对角速度进行积分。另一方面,MPU6050加速度计测量加速度的方式与ADXL345加速度传感器相同。简而言之,它可以测量沿3个轴的重力加速度,并使用一些三角学数学,我们可以计算传感器定位的角度。因此,如果我们融合或组合加速度计和陀螺仪数据,我们可以获得有关传感器方向的非常准确的信息。MPU6050 IMU也称为六轴运动跟踪设备或6 DoF(六自由度)设备,因为它有6个输出,即3个加速度计输出和3个陀螺仪输出。
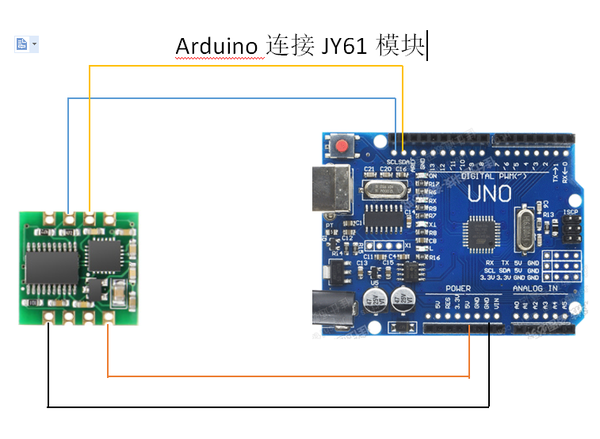
3 Arduino和MPU6050的连接方法
我们来看看如何使用Arduino连接和读取MPU6050传感器的数据。我们使用I2C协议与Arduino进行通信,因此只需要两条线进行连接,另外还有两条线用于供电。
4 MPU6050的Arduino代码
以下是用于从MPU6050传感器读取数据的Arduino代码。这个代码可以直接复制使用的。在代码下方,您可以找到它的详细说明。
*
Arduino and MPU6050 Accelerometer and Gyroscope Sensor Tutorial
*/
#include <Wire.h>
const int MPU = 0x68; // MPU6050 I2C address
float AccX, AccY, AccZ;
float GyroX, GyroY, GyroZ;
float accAngleX, accAngleY, gyroAngleX, gyroAngleY, gyroAngleZ;
float roll, pitch, yaw;
float AccErrorX, AccErrorY, GyroErrorX, GyroErrorY, GyroErrorZ;
float elapsedTime, currentTime, previousTime;
int c = 0;
void setup() {
Serial.begin(19200);
Wire.begin(); // Initialize comunication
Wire.beginTransmission(MPU); // Start communication with MPU6050 // MPU=0x68
Wire.write(0x6B); // Talk to the register 6B
Wire.write(0x00); // Make reset - place a 0 into the 6B register
Wire.endTransmission(true); //end the transmission
/*
// Configure Accelerometer Sensitivity - Full Scale Range (default +/- 2g)
Wire.beginTransmission(MPU);
Wire.write(0x1C); //Talk to the ACCEL_CONFIG register (1C hex)
Wire.write(0x10); //Set the register bits as 00010000 (+/- 8g full scale range)
Wire.endTransmission(true);
// Configure Gyro Sensitivity - Full Scale Range (default +/- 250deg/s)
Wire.beginTransmission(MPU);
Wire.write(0x1B); // Talk to the GYRO_CONFIG register (1B hex)
Wire.write(0x10); // Set the register bits as 00010000 (1000deg/s full scale)
Wire.endTransmission(true);
delay(20);
*/
// Call this function if you need to get the IMU error values for your module
calculate_IMU_error();
delay(20);
}
void loop() {
// === Read acceleromter data === //
Wire.beginTransmission(MPU);
Wire.write(0x3B); // Start with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true); // Read 6 registers total, each axis value is stored in 2 registers
//For a range of +-2g, we need to divide the raw values by 16384, according to the datasheet
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0; // X-axis value
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0; // Y-axis value
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0; // Z-axis value
// Calculating Roll and Pitch from the accelerometer data
accAngleX = (atan(AccY / sqrt(pow(AccX, 2) + pow(AccZ, 2))) * 180 / PI) - 0.58; // AccErrorX ~(0.58) See the calculate_IMU_error()custom function for more details
accAngleY = (atan(-1 * AccX / sqrt(pow(AccY, 2) + pow(AccZ, 2))) * 180 / PI) + 1.58; // AccErrorY ~(-1.58)
// === Read gyroscope data === //
previousTime = currentTime; // Previous time is stored before the actual time read
currentTime = millis(); // Current time actual time read
elapsedTime = (currentTime - previousTime) / 1000; // Divide by 1000 to get seconds
Wire.beginTransmission(MPU);
Wire.write(0x43); // Gyro data first register address 0x43
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true); // Read 4 registers total, each axis value is stored in 2 registers
GyroX = (Wire.read() << 8 | Wire.read()) / 131.0; // For a 250deg/s range we have to divide first the raw value by 131.0, according to the datasheet
GyroY = (Wire.read() << 8 | Wire.read()) / 131.0;
GyroZ = (Wire.read() << 8 | Wire.read()) / 131.0;
// Correct the outputs with the calculated error values
GyroX = GyroX + 0.56; // GyroErrorX ~(-0.56)
GyroY = GyroY - 2; // GyroErrorY ~(2)
GyroZ = GyroZ + 0.79; // GyroErrorZ ~ (-0.8)
// Currently the raw values are in degrees per seconds, deg/s, so we need to multiply by sendonds (s) to get the angle in degrees
gyroAngleX = gyroAngleX + GyroX * elapsedTime; // deg/s * s = deg
gyroAngleY = gyroAngleY + GyroY * elapsedTime;
yaw = yaw + GyroZ * elapsedTime;
// Complementary filter - combine acceleromter and gyro angle values
roll = 0.96 * gyroAngleX + 0.04 * accAngleX;
pitch = 0.96 * gyroAngleY + 0.04 * accAngleY;
// Print the values on the serial monitor
Serial.print(roll);
Serial.print("/");
Serial.print(pitch);
Serial.print("/");
Serial.println(yaw);
}
void calculate_IMU_error() {
// We can call this funtion in the setup section to calculate the accelerometer and gyro data error. From here we will get the error values used in the above equations printed on the Serial Monitor.
// Note that we should place the IMU flat in order to get the proper values, so that we then can the correct values
// Read accelerometer values 200 times
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
// Sum all readings
AccErrorX = AccErrorX + ((atan((AccY) / sqrt(pow((AccX), 2) + pow((AccZ), 2))) * 180 / PI));
AccErrorY = AccErrorY + ((atan(-1 * (AccX) / sqrt(pow((AccY), 2) + pow((AccZ), 2))) * 180 / PI));
c++;
}
//Divide the sum by 200 to get the error value
AccErrorX = AccErrorX / 200;
AccErrorY = AccErrorY / 200;
c = 0;
// Read gyro values 200 times
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x43);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
GyroX = Wire.read() << 8 | Wire.read();
GyroY = Wire.read() << 8 | Wire.read();
GyroZ = Wire.read() << 8 | Wire.read();
// Sum all readings
GyroErrorX = GyroErrorX + (GyroX / 131.0);
GyroErrorY = GyroErrorY + (GyroY / 131.0);
GyroErrorZ = GyroErrorZ + (GyroZ / 131.0);
c++;
}
//Divide the sum by 200 to get the error value
GyroErrorX = GyroErrorX / 200;
GyroErrorY = GyroErrorY / 200;
GyroErrorZ = GyroErrorZ / 200;
// Print the error values on the Serial Monitor
Serial.print("AccErrorX: ");
Serial.println(AccErrorX);
Serial.print("AccErrorY: ");
Serial.println(AccErrorY);
Serial.print("GyroErrorX: ");
Serial.println(GyroErrorX);
Serial.print("GyroErrorY: ");
Serial.println(GyroErrorY);
Serial.print("GyroErrorZ: ");
Serial.println(GyroErrorZ);
}
代码描述:首先我们需要包含用于I2C通信的Wire.h库,并定义一些存储数据所需的变量。
在setup()函数部分,我们需要初始化wire库并通过电源管理寄存器复位传感器。 为此,我们需要查看传感器的数据手册,从中我们可以看到寄存器地址。

MPU6050电源管理寄存器0x6B
此外,如果需要,我们可以使用配置寄存器为加速度计和陀螺仪选择满量程范围。 对于这个例子,我们将使用加速度计的默认±2g范围和陀螺仪的250度/秒范围。
在loop()函数部分,我们首先读取加速度计的数据。 每个轴的数据存储在两个字节或寄存器中,我们可以从传感器的数据手册中看到这些寄存器的地址。
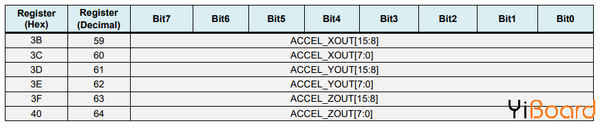
MPU6050 imu加速度计数据寄存器
为了全部读取它们,我们从第一个寄存器开始,然后使用requiestFrom()函数,我们请求读取X、Y和Z轴的所有6个寄存器。 然后我们从每个寄存器读取数据,并且由于输出是二进制补码,我们将它们相应地组合以获得正确的值。
[backcolor=inherit !important]
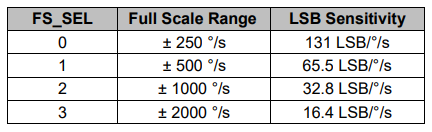
为了获得-1g到+ 1g的输出值,适合计算角度,我们将输出除以先前选择的灵敏度。
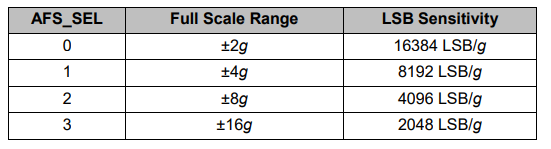
mpu6050加速度计灵敏度满量程范围
最后,使用这两个公式,我们从加速度计数据计算滚转角和俯仰角。
[backcolor=inherit !important]
接下来,使用相同的方法我们得到陀螺仪数据。
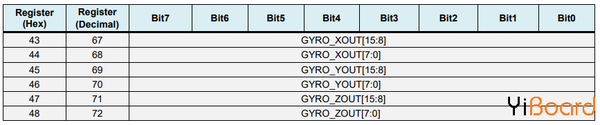
我们读取了六个陀螺仪寄存器,适当地组合它们的数据并将其除以先前选择的灵敏度,以便以每秒的度数获得输出。
[backcolor=inherit !important]
在这里你可以注意到我用一些小的计算误差值来校正输出值,我将在接下来解释它们是如何得到它们的。 因此,当输出以度/秒为单位时,现在我们需要将它们与时间相乘以得到度数。 使用millis()函数在每次读取迭代之前捕获时间值。
[backcolor=inherit !important]
最后,我们使用互补滤波器融合加速度计和陀螺仪数据。在这里,我们采用96%的陀螺仪数据,因为它非常准确,不会受到外力的影响。陀螺仪的缺点是存在漂移,或者随着时间的推移在输出中引入误差。因此,从长远来看,我们使用来自加速度计的数据,本例为4%,足以消除陀螺仪的漂移误差。
[backcolor=inherit !important]
但是,由于我们无法从加速度计数据计算偏航,我们无法在其上实现互补滤波器。
在我们看一下结果之前,让我快速解释一下如何获得纠错值。为了计算这些错误,我们可以在传感器处于平坦静止位置时调用calculate_IMU_error()自定义函数。在这里,我们为所有输出做了200个读数,我们将它们相加并将它们除以200。由于我们将传感器保持在平坦静止位置,因此预期输出值应为0。因此,通过此计算,我们可以得到传感器的平均误差。
[backcolor=inherit !important]
输出结果
我们只需在串行监视器上打印这些值,一旦我们知道它们,我们就可以在前面所示的代码中实现它们,用于滚动和俯仰计算,以及3个陀螺仪输出。
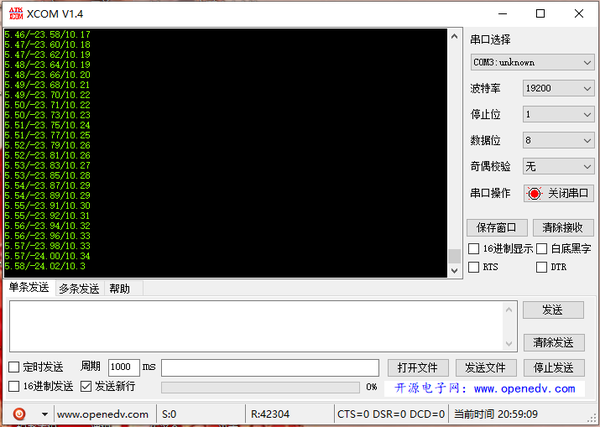
最后,使用Serial.print函数,我们可以在串行监视器上打印Roll、Pitch和Yaw值,看看传感器是否正常工作。
|






