|
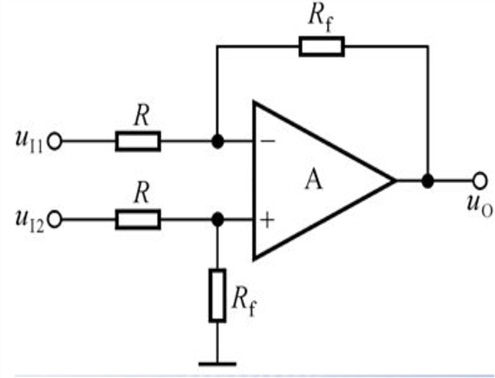
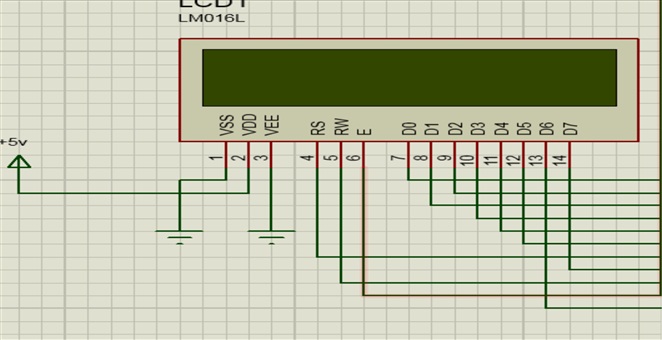
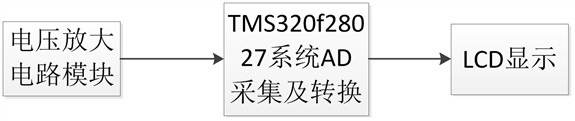
»ùÓÚTMS320F28027ĐŸÆŹ”ÄÎąÈő”çŃčĐĆșĆČâÁżŁŹÊìÁ·ŐÆÎŐDSPżȘ·ą»·ŸłCCSÈíŒțÒÔŒ°Proteus”ç·ÉèŒÆÈíŒțŁŹŐÆÎŐÎąÈő”çŃč”ÄČâÁż·œÊœŁŹŐÆÎŐTMS320F28027ĐŸÆŹ”Ä»ù±ŸIOČÙŚśĄąÖĐ¶Ï·œÊœĄąADCčŠÄÜ”ÄÊčÓĂŁŹœűÒ»ČœÁËœâDSPÏ”Íł”ÄÌ۔㥣 »ùÓÚTMS320F28027ĐŸÆŹ”ÄÎąÈő”çŃčĐĆșĆČâÁż·œ°ž°üÀšÈçÏÂŒžČż·ÖŁș ÎȘÁ˱ăÓÚ¶ÔÎąÈő”çŃ裚2*(10-3)*sin(100pi*t)Ł©œűĐĐČâÁżŁŹÉèŒÆÔËËă·ĆŽó”ç·¶ÔÎąÈő”çŃčœűĐĐ·ĆŽóŽŠÀíŁŹÊč”Ă”çŃč±äÎȘ0~3.2VŁŹ”ç·ÉèŒÆÈçÏÂŁș ”çŃčŒÆËăč«ÊœŁșVout=Rf/R*(u11-u12)Ł» Łš2Ł©»ùÓÚTMS320F28027”Ä”çŃčĐĆșĆČÉŒŻŒ°ŚȘ»» TMS320F28027”ÄADCčŠÄÜ: 1Łź12λ˫ČÉŃù±ŁłÖ”ç·ĄŁ 2ŁźÍŹÊ±ČÉŃùșÍĐòÁĐČÉŃù·œÊœĄŁ 3ŁźÈ«·¶Î§”çŃčÊäÈ룏0V”œ3.3Vč̶šŁŹ»òŐßVREFLO”œVREFHIżÉ”śĄŁ 4ŁźÏ”ÍłÊ±ÖÓÈ«Æ”ÔËĐĐŁŹÎȚĐè·ÖÆ”ĄŁ 5Łź16ÊäÈëÍš”ÀĄŁ 6Łź16žöSOCĆäÖĂŁŹÉèÖĂŽ„·ąŁŹČÉŃùŽ°żÚŁŹÍš”ÀĄŁ 7Łź16žö¶ÀÁą±ŁŽæŚȘ»»œáčû”ÄœáčûŒÄŽæÆśĄŁ 8Łź¶àŽ„·ąÔŽĄŁ 9Łź9žöÁé»î”ÄPIEÖĐ¶Ï ADCČÉŒŻ”çŃčŒÆËăč«ÊœÈçÏÂŁș Vol=ŁšAdcResult.ADCRESULT0Ł©/4096*3.3Ł» Łš3Ł©”çŃč”ĶŻÌŹÏÔÊŸ ČâÁż”œ”çŃčșóœűĐĐÏÔÊŸŁŹ±ŸŽÎÊ”ŃéČÉÓĂLM016LĐÍșĆLCDÏÔÊŸÆśœűĐĐ”çŃčÏÔÊŸĄŁ ÒęœĆœÓżÚ˔ÜŁș ”Ú1œĆŁșVSSÎȘ”Ű”çÔŽĄŁ ”Ú2œĆŁșVDDœÓ5VŐę”çÔŽĄŁ ”Ú3œĆŁșVLÎȘÒșŸ§ÏÔÊŸÆś¶Ô±È¶È”śŐû¶ËŁŹœÓŐę”çԎʱ¶Ô±È¶ÈŚîÈőŁŹœÓ”Űʱ¶Ô±È¶ÈŚîžßĄŁ ”Ú4œĆŁșRSÎȘŒÄŽæÆśŃĄÔńŁŹžß”çÆœÊ±ŃĄÔńÊęŸĘŒÄŽæÆśĄą”Í”çÆœÊ±ŃĄÔńÖžÁîŒÄŽæÆśĄŁ ”Ú5œĆŁșR/WÎȘ¶ÁĐŽĐĆșĆÏߣŹžß”çƜʱœűĐжÁČÙŚśŁŹ”Í”çƜʱœűĐĐĐŽČÙŚśĄŁ”±RSșÍR/WčČÍŹÎȘ”Í”çƜʱżÉÒÔĐŽÈëÖžÁî»òŐßÏÔÊŸ”ŰÖ·ŁŹ”±RSÎȘ”Í”çÆœR/WÎȘžß”çƜʱżÉÒÔ¶ÁĂŠĐĆșĆŁŹ”±RSÎȘžß”çÆœR/WÎȘ”Í”çƜʱżÉÒÔĐŽÈëÊęŸĘĄŁ ”Ú6œĆŁșE¶ËÎȘÊčÄܶˣŹ”±E¶ËÓÉžß”çÆœÌű±äłÉ”Í”çƜʱŁŹÒșŸ§ÄŁżéÖŽĐĐĂüÁ ”Ú7Ą«14œĆŁșD0Ą«D7ÎȘ8λ˫ÏòÊęŸĘÏߥŁ LM016LœÓÏßÈçÏÂËùÊŸŁș ÖžÁîÈçÏÂËùÊŸŁș
ĐŸÆŹÊ±Đò±íÈçÏÂŁș | | | | | | | RS=LŁŹR/W=LŁŹD0ĄȘD7=ÖžÁîÂ룏E=žßÂöłć | | | | | | | | | | RS=HŁŹR/W=LŁŹD0ĄȘD7=ÊęŸĘŁŹE=žßÂöłć | | |
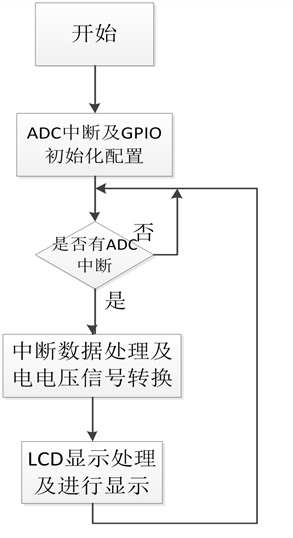
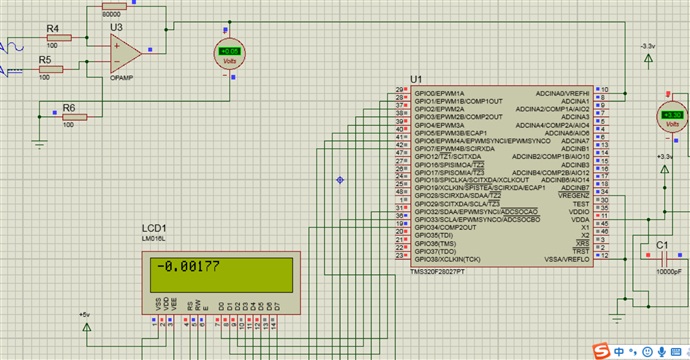
Łš2Ł©łÌĐòÁśłÌÍŒ ”ç·ÉèŒÆÈçÏÂŁș łÌĐòÈçÏÂËùÊŸŁș ÔÚProteusÈíŒțœűĐĐ·ÂŐæŁŹ·ÂŐæœáčûœŰÍŒÈçÏÂŁș LCDÏÔÊŸĐĄÊę”ășó5λŁŹÊäÈëŐęÏÒ”çŃč·ùÖ”ÎȘ0.002ŁŹÏÔÊŸŸ«¶ÈÎȘ°Ù·ÖÖźÒ»ĄŁ
È«ČżŚÊÁÏ51heiÏÂÔŰ”ŰÖ·Łș | 




 čÜÀíÔ±QQ:125739409;ŒŒÊőœ»ÁśQQÈș281945664
čÜÀíÔ±QQ:125739409;ŒŒÊőœ»ÁśQQÈș281945664








 QQșĂÓŃșÍÈș
QQșĂÓŃșÍÈș QQżŐŒä
QQżŐŒä ÌÚѶιȩ
ÌÚѶιȩ ÌÚѶĆóÓŃ
ÌÚѶĆóÓŃ ÊŐČŰ
ÊŐČŰ ÌÔÌû
ÌÔÌû ¶„
¶„ ČÈ
ČÈ лл„֜
лл„֜