|
目录 前 言 1 echo_test案例 1 案例功能 2 操作说明 3 关键代码 3.1 linux_demo代码说明 3.2 freertos_demo代码说明 3.3 baremetal_demo代码说明
前 言
本文主要介绍ZYNQ基于OpenAMP框架的双核ARM通信案例的使用说明,CPU0(Master)运行Linux系统,CPU1(Remote)运行裸机或FreeRTOS程序。CPU0使用remoteproc加载CPU1程序,并对CPU1进行配置。 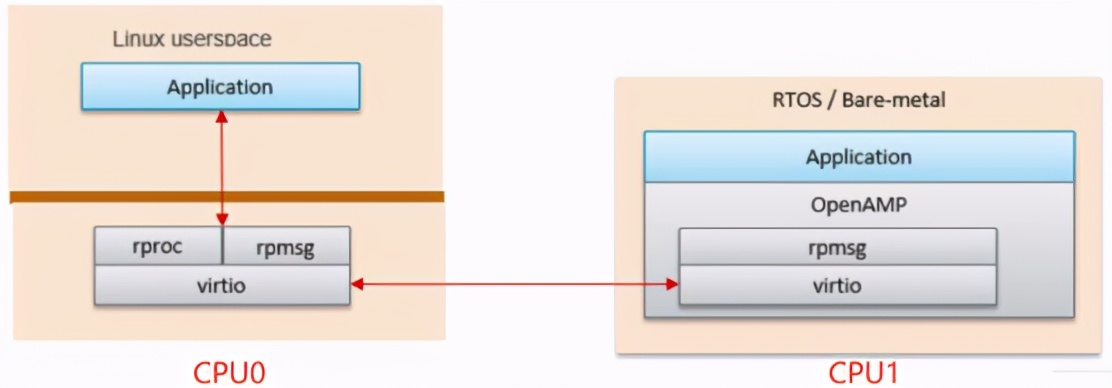
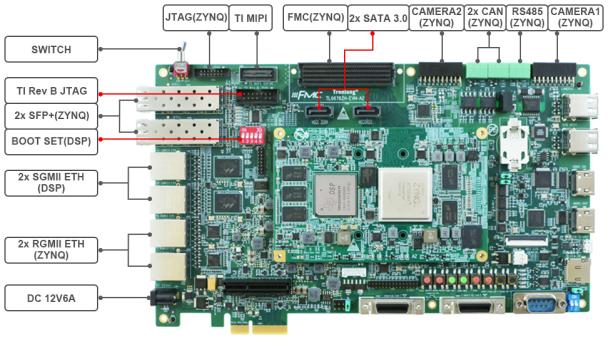
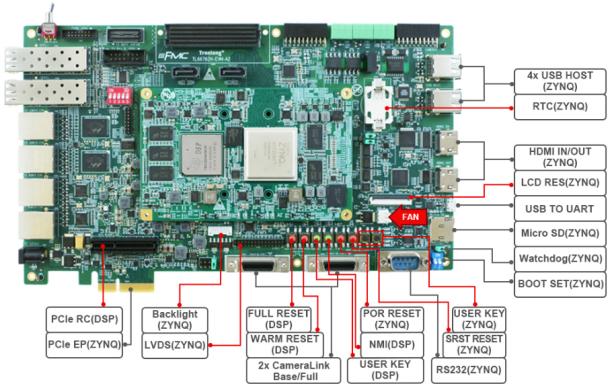
echo_test案例开发手册是基于创龙科技 TI TMS320C6678 + Xilinx Zynq-7045的高速多路高清视频采集处理平台,采用DSP+FPGA+ARM架构。
SOM-TL6678ZH核心板正面图
SOM-TL6678ZH核心板背面图
TL6678ZH-EVM评估板资源图1
TL6678ZH-EVM评估板资源图2 表 1
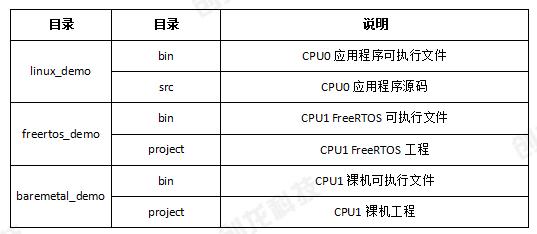
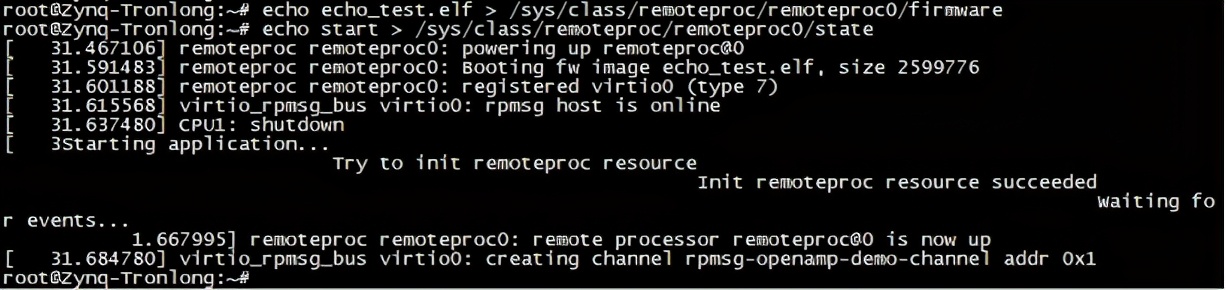
目录说明 linux_demobinCPU0应用程序可执行文件 srcCPU0应用程序源码 freertos_demobinCPU1 FreeRTOS可执行文件 projectCPU1 FreeRTOS工程 baremetal_demobinCPU1裸机可执行文件 projectCPU1裸机工程 echo_test案例 案例功能 案例功能:CPU0使用RPMsg向CPU1发送数据,CPU1接收到数据后再使用RPMsg向CPU0回传数据。CPU0对回传的数据进行验证,并输出验证结果。 操作说明 将CPU1裸机或FreeRTOS可执行文件复制到评估板文件系统“/lib/firmware/”目录下,并执行如下命令加载CPU1程序。 Target# echo echo_test.elf > /sys/class/remoteproc/remoteproc0/firmware Target# echo start > /sys/class/remoteproc/remoteproc0/state
图 2 执行如下命令加载RPMsg驱动,并在“/dev/”目录下生成RPMsg设备节点。RPMsg驱动源码为内核“drivers/rpmsg/”目录下的rpmsg_user_dev_driver.c文件。 Target# modprobe rpmsg_user_dev_driver
图 3
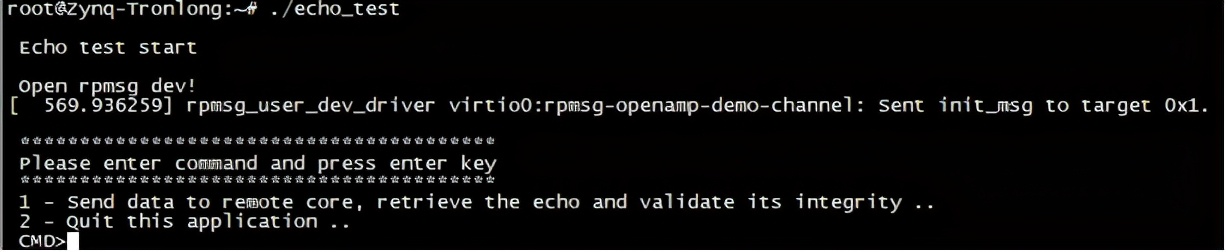
将CPU0应用程序可执行文件复制到评估板文件系统,并执行如下命令通过RPMsg与CPU1进行通信。 Target# ./echo_test
图4
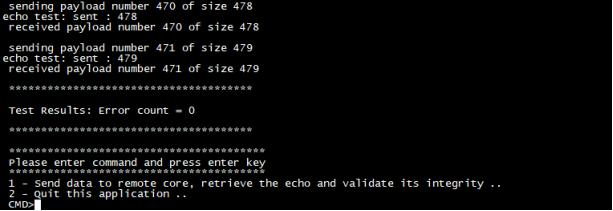
输入1,并按回车键进行测试。
图 5
图 6
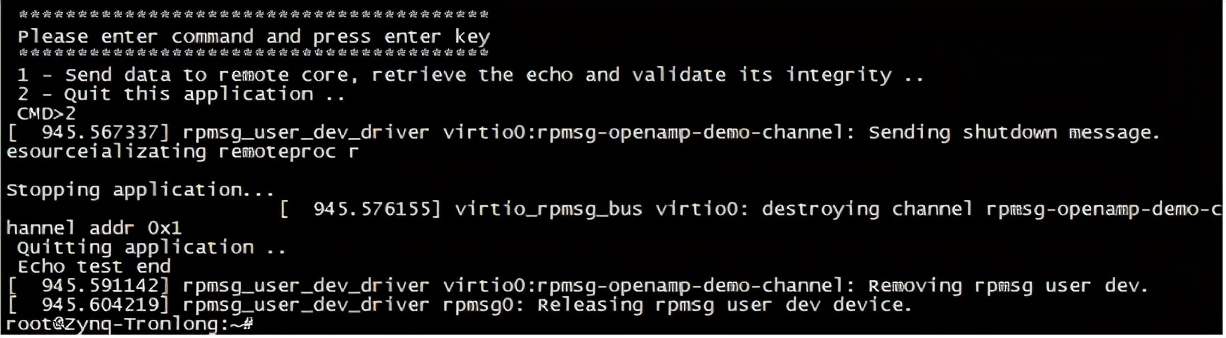
输入2,并按回车键退出测试。
图 7
执行如下命令,停止CPU1程序。 Target# echo stop > /sys/class/remoteproc/remoteproc0/state
图 8
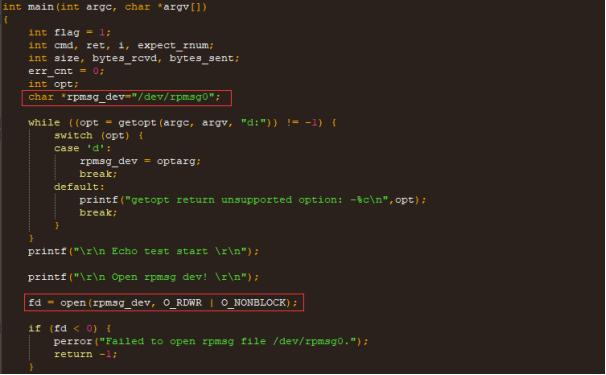
关键代码 linux_demo代码说明 打开RPMsg驱动设备节点。
图 9
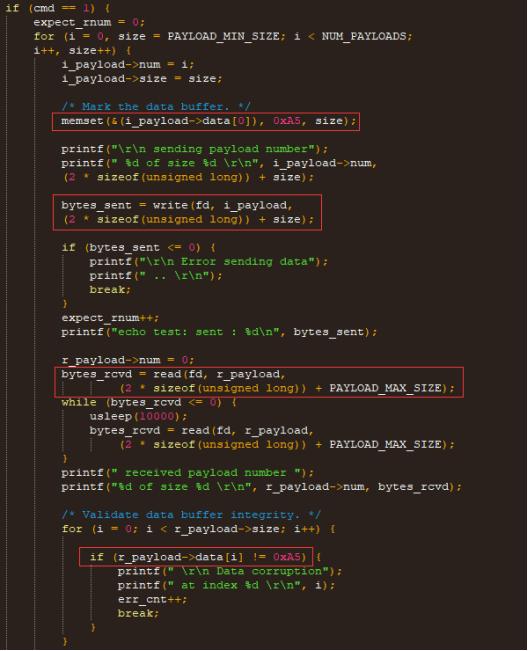
向CPU1发送数据,并对从CPU1回传的数据进行验证。
图 10
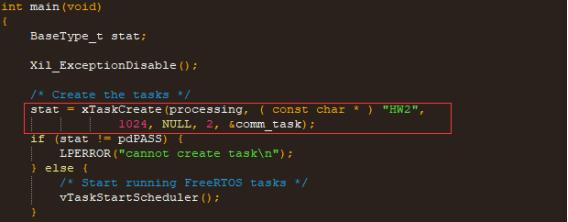
freertos_demo代码说明 创建processing任务。
图 11
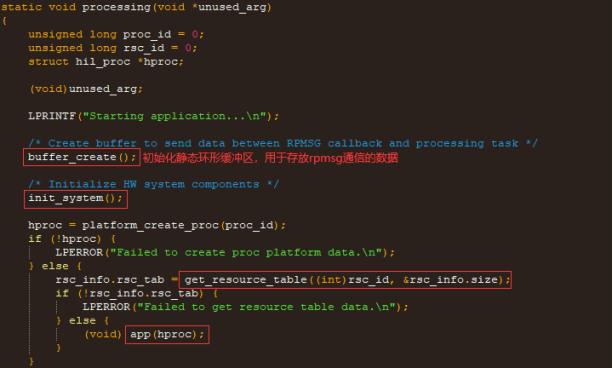
(2)在processing()中进行函数调用。
图 12
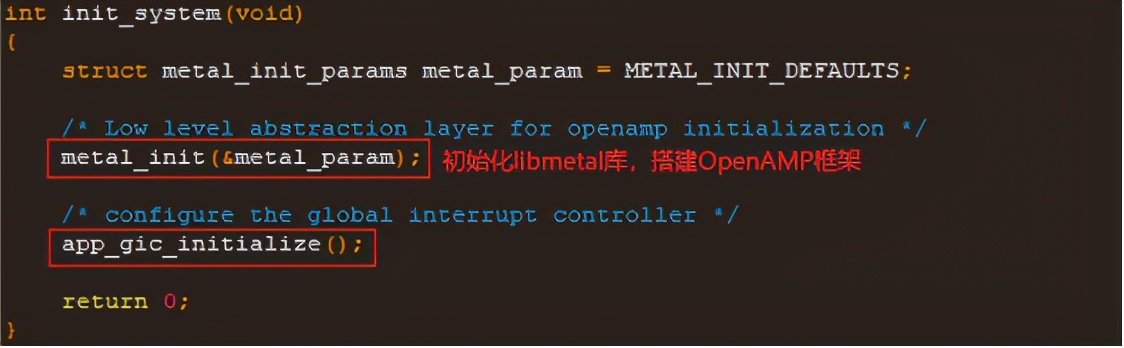
调用init_system()初始化libmetal库与GIC控制器等。
图13
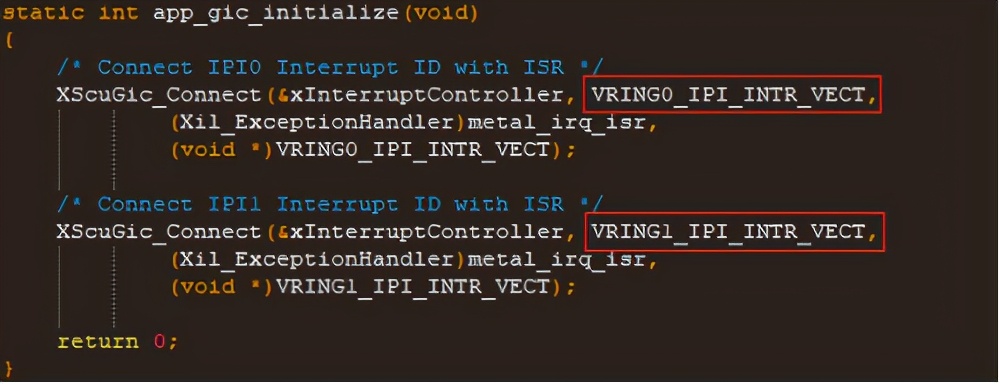
绑定中断号与中断服务函数,中断号需与设备树配置的中断号一致。
图 14
图 15
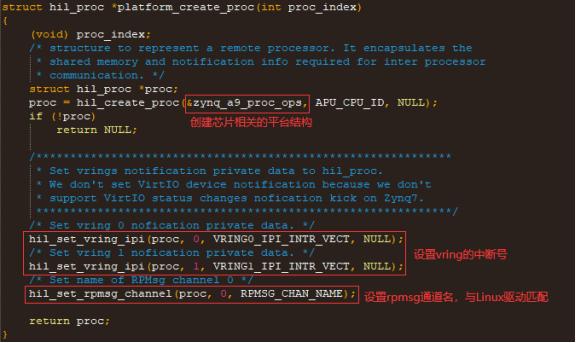
调用platform_create_proc()创建平台相关信息。
图 16
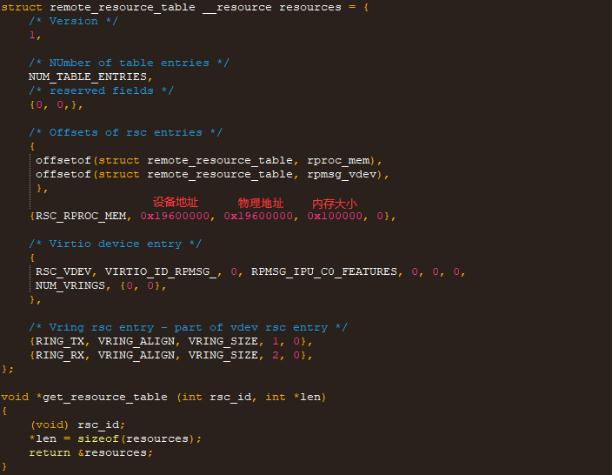
调用get_resource_table()获取资源表信息,资源表包含内存和virtio设备资源。virtio设备包含vring地址、vring大小和vring对齐方式等信息。
图 17
(13)以上函数调用成功后,再调用app()。
图 18
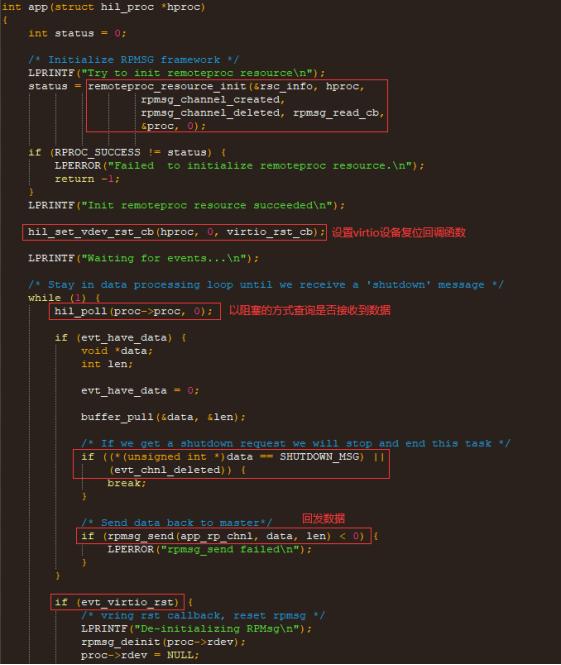
调用remoteproc_resource_init()对之前获得的平台信息、资源表信息进行处理。创建Remote Device,并为其设置增加、删除、读取RPMsg通道函数。
图 19
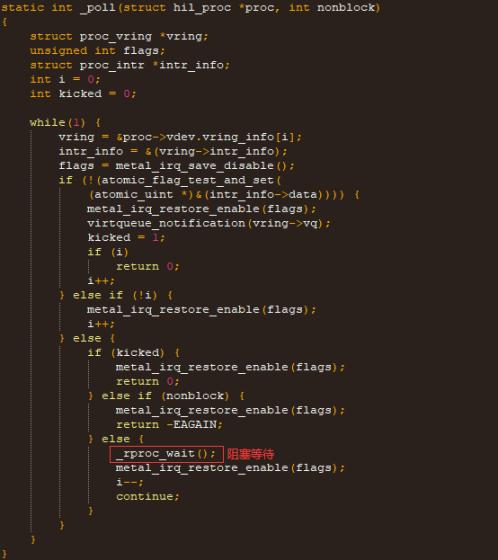
调用hil_poll()以阻塞的方式调用poll函数,并等待数据接收。
图 20
图 21
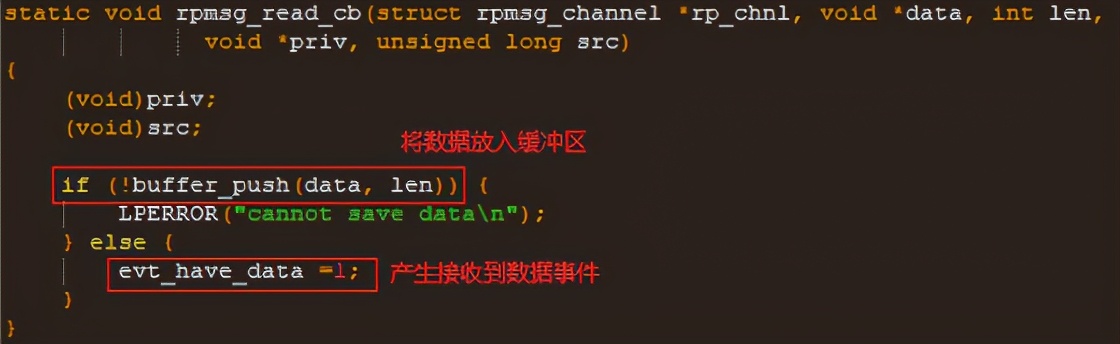
在数据读取函数rpmsg_read_cb()中,将接收到的数据放入缓冲区后产生数据接收事件,并在app()中进行事件处理。
图 22
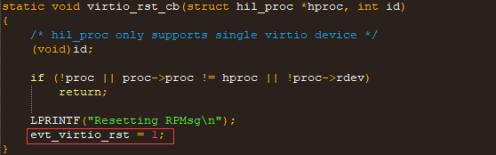
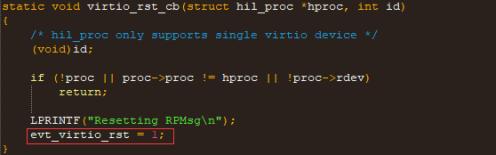
在virtio设备复位函数virtio_rst_cb()中产生复位virtio事件,并在app()中进行事件处理。
图 23
在RPMsg通道创建函数rpmsg_channel_created()中,创建一个全局RPMsg端点,并设置端点读取函数。RPMsg通信通过端点完成,与USB类似。
图 24
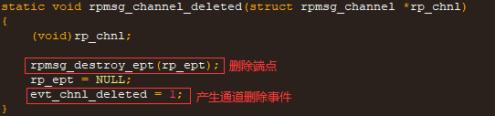
在RPMsg通道删除函数rpmsg_channel_deleted()中,删除RPMsg端点同时产生通道删除事件,并在app()中进行事件处理。
图 25
baremetal_demo代码说明
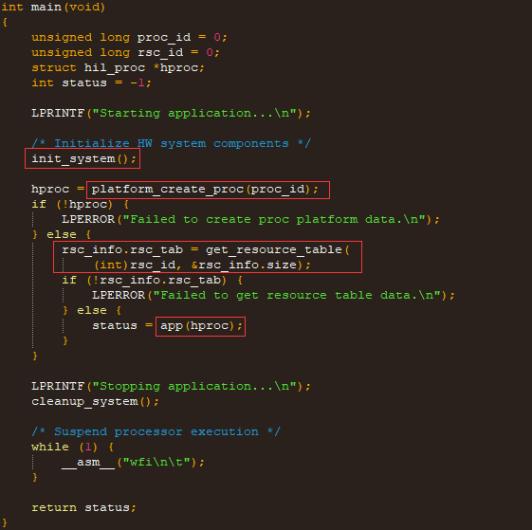
由于裸机与FreeRTOS程序相似,因此baremetal_demo代码说明可参考freertos_demo代码说明小节,下面对部分代码进行补充说明。 在main()中调用init_system()初始化libmetal库与GIC控制器等。调用platform_create_proc()创建平台相关信息。调用get_resource_table()获取资源表信息。以上函数调用成功后,再调用app()。
图 26
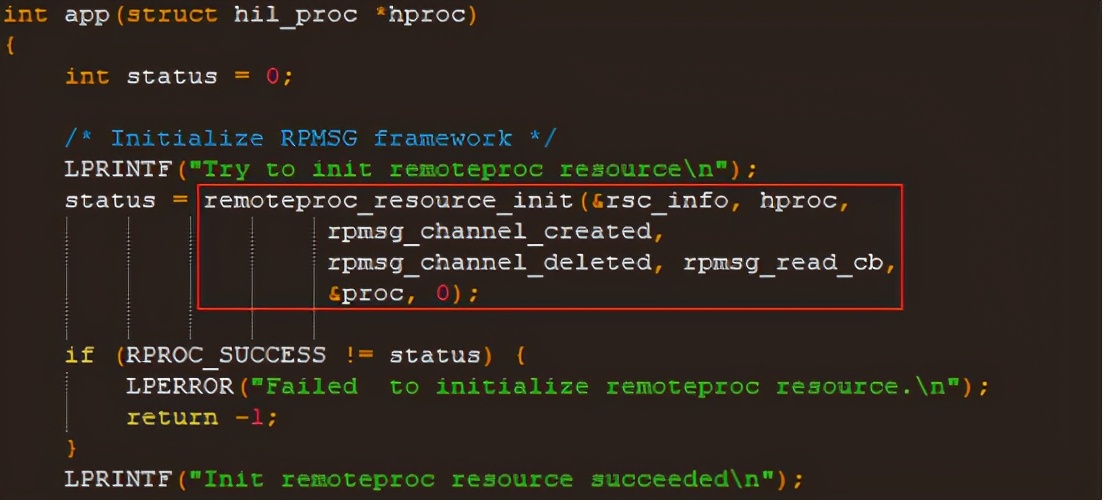
调用remoteproc_resource_init()对之前获得的平台信息、资源表信息进行处理。创建Remote Device,并为其设置增加、删除、读取RPMsg通道函数。
图 27
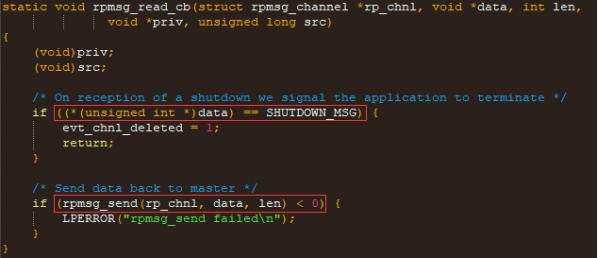
在数据读取函数rpmsg_read_cb()中,对从CPU0接收到的数据进行判断,并进行不同处理(关机或回传数据),实现通信和生命周期管理。
图 28
如需获取案例源码、TL6678ZH-EVM评估板或其他产品详细资料,欢迎留言或者私聊!
|