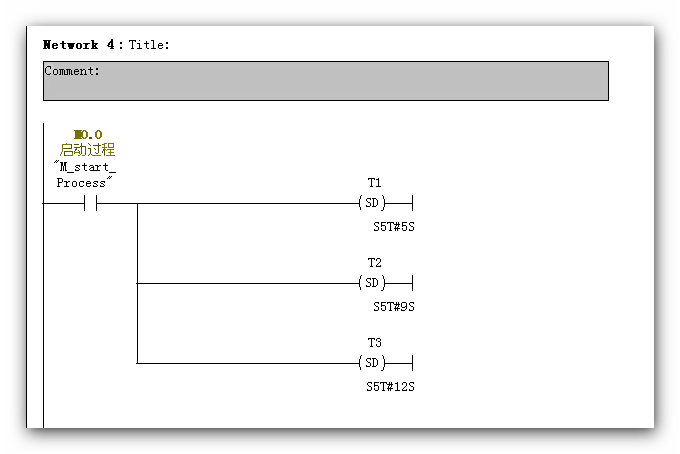
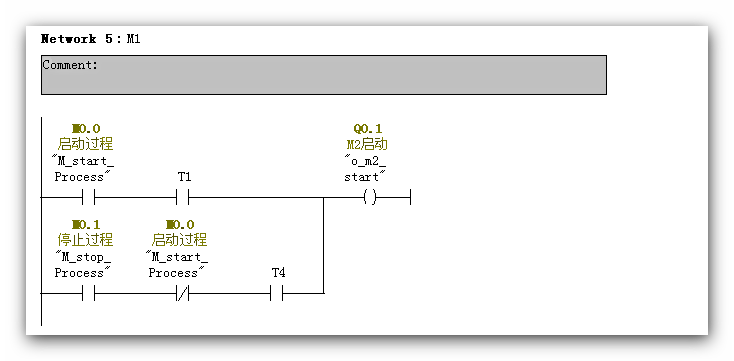
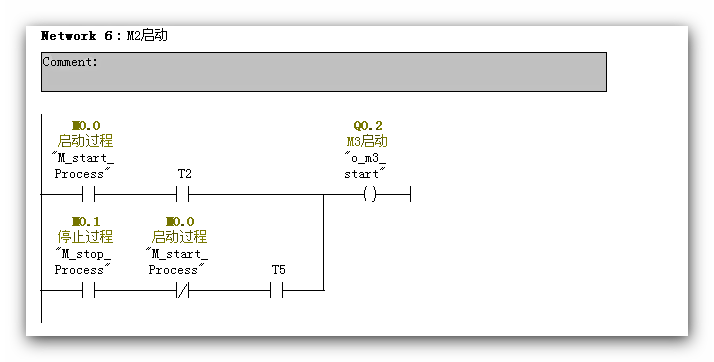
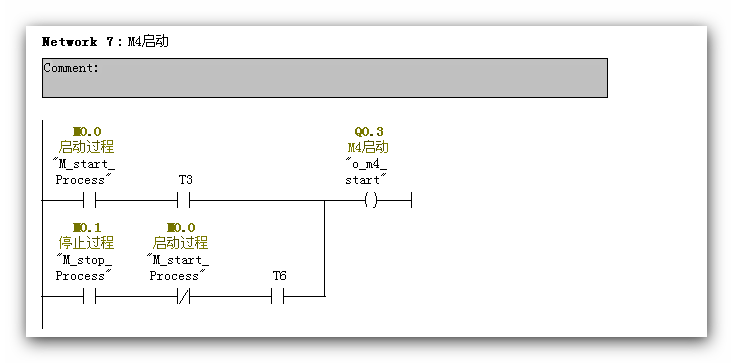
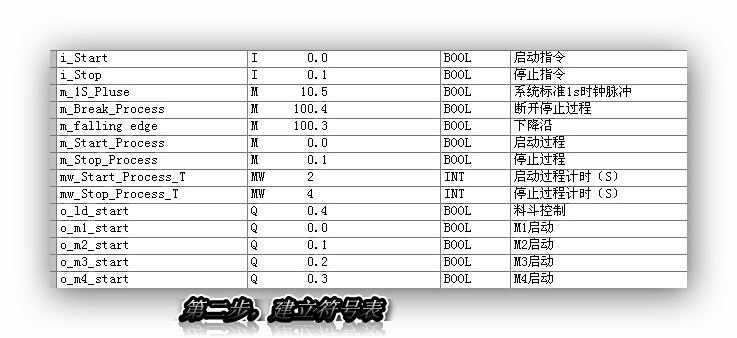
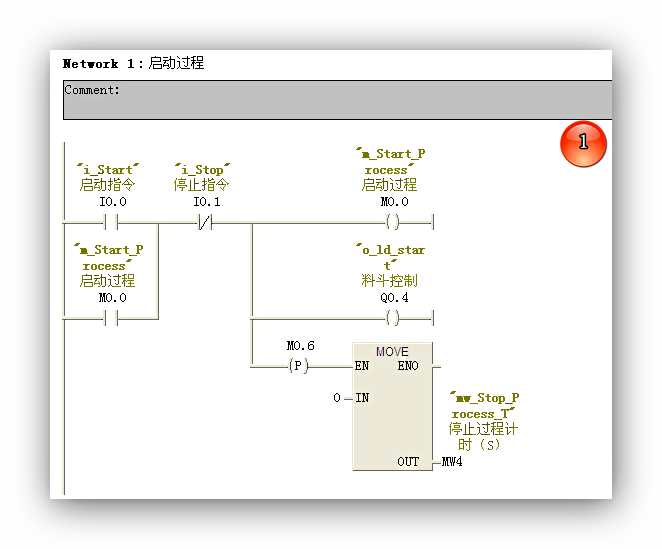
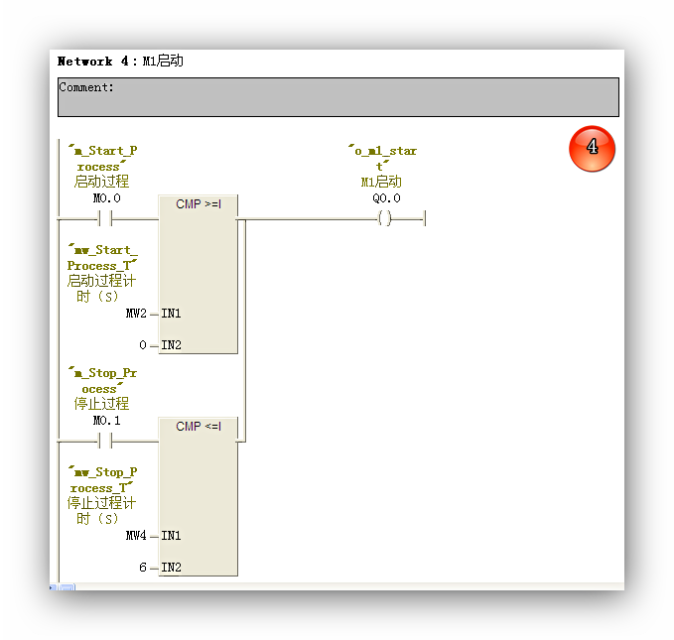
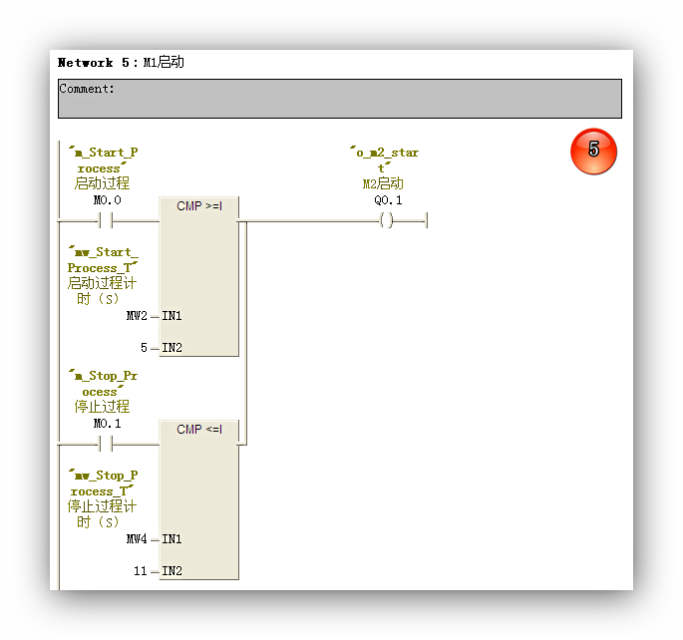
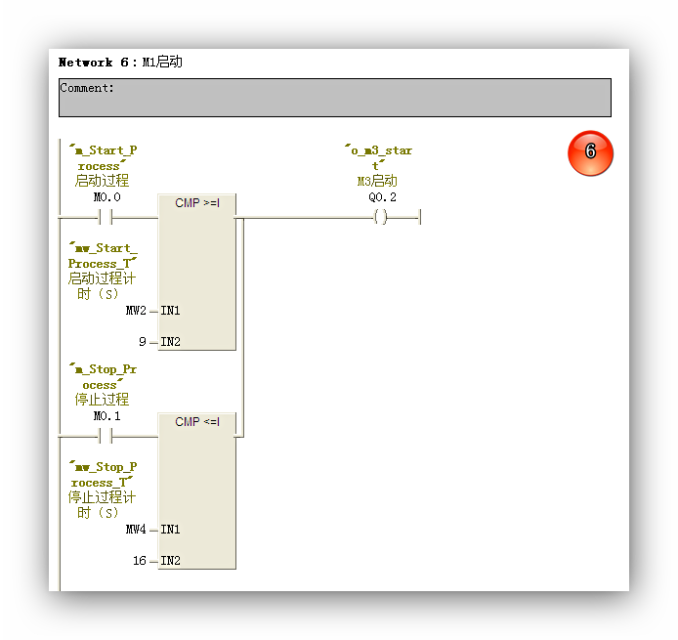
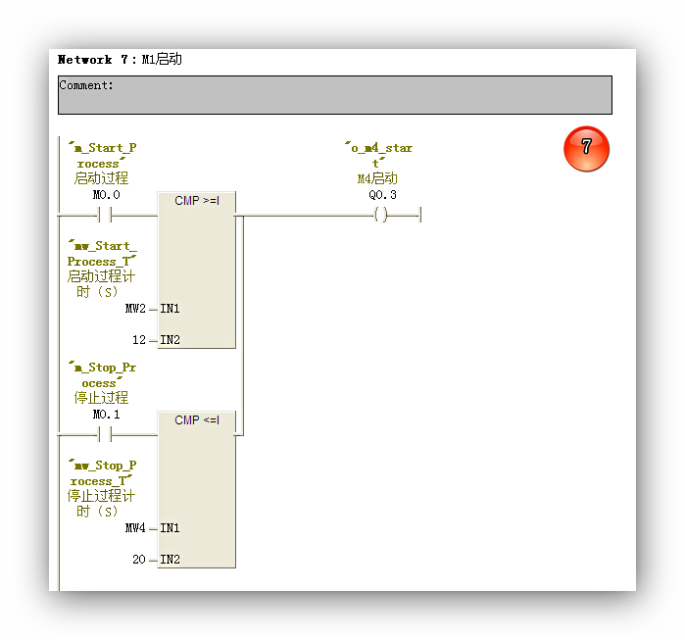
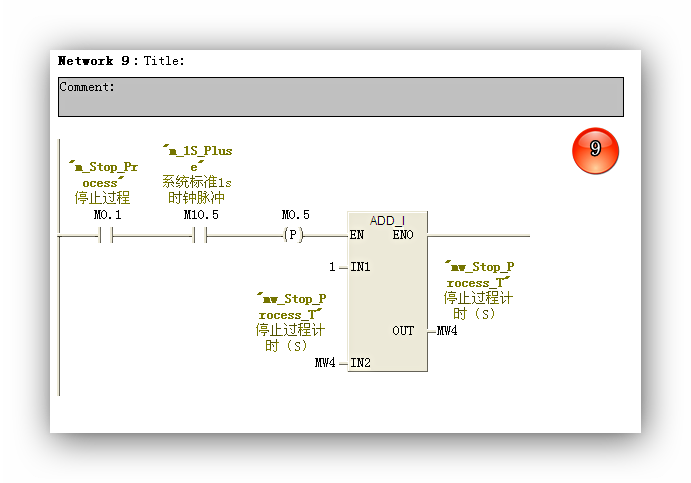
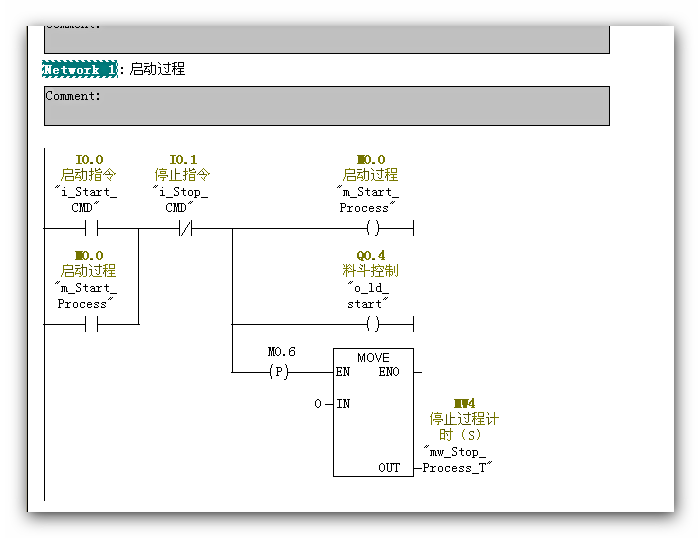
第三课时【编程实战】
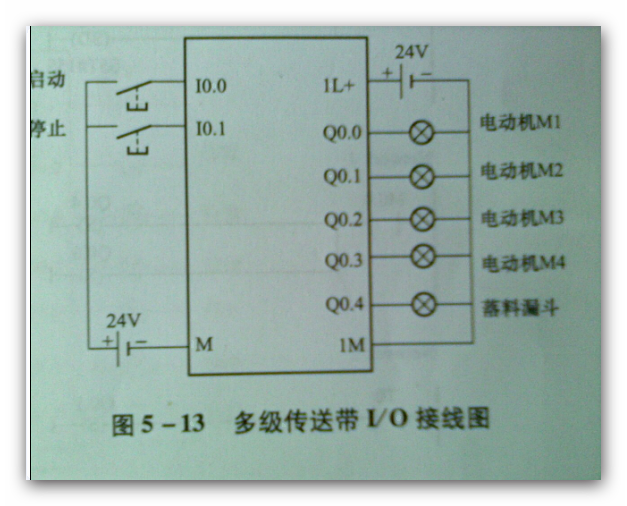
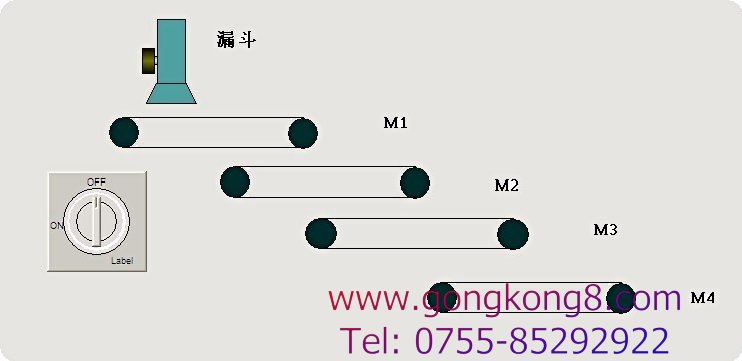
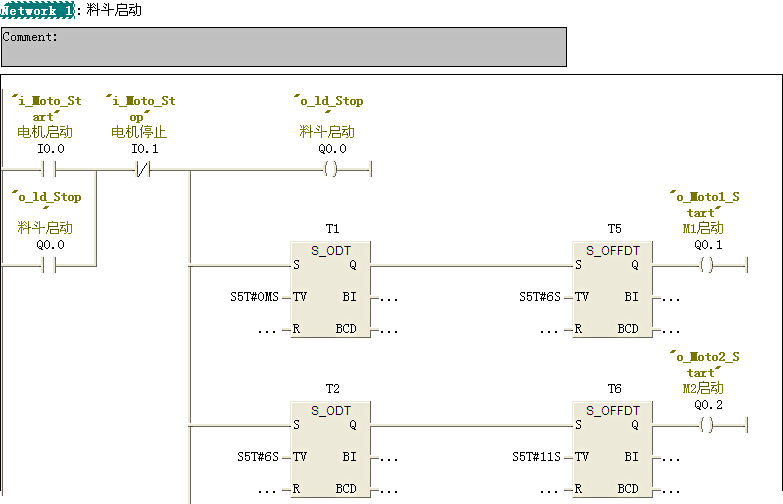
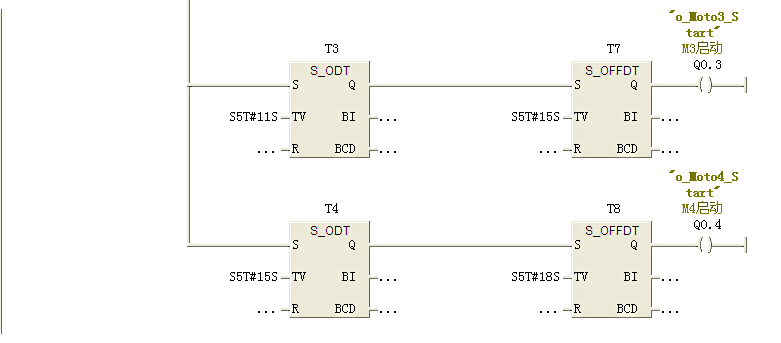
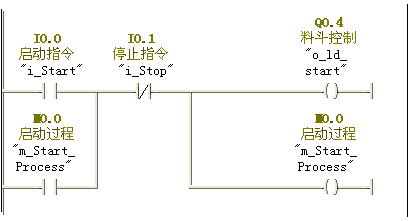
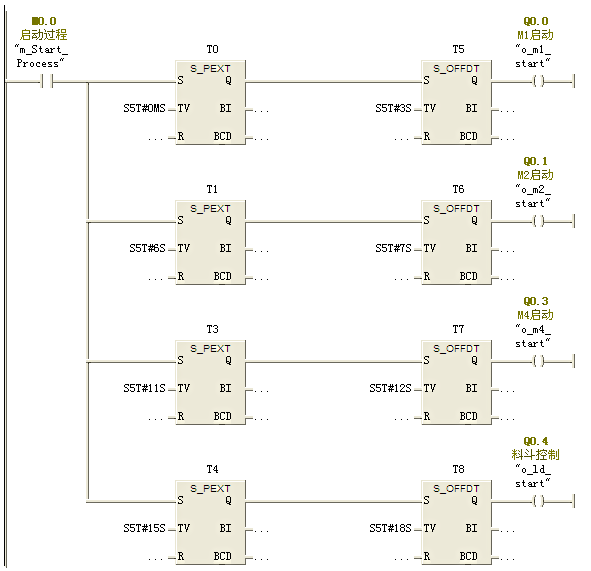
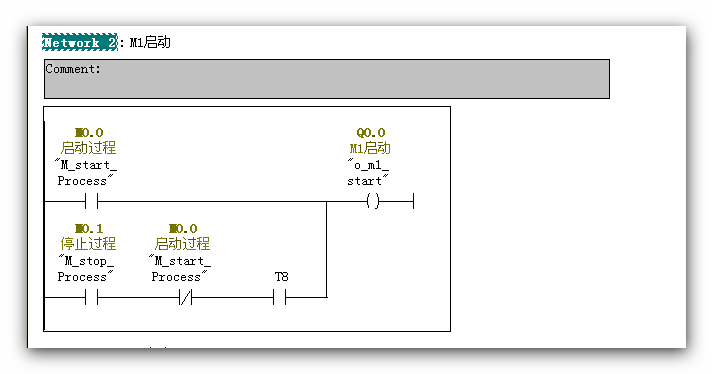
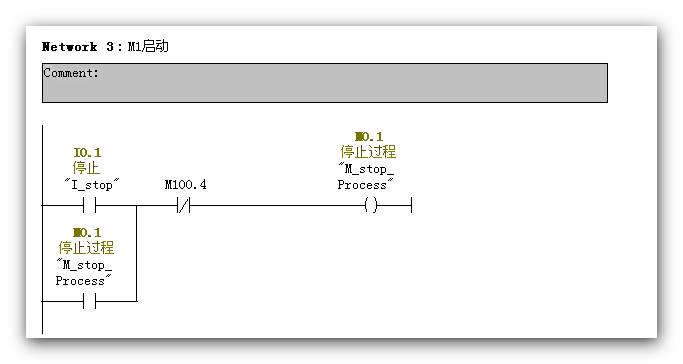
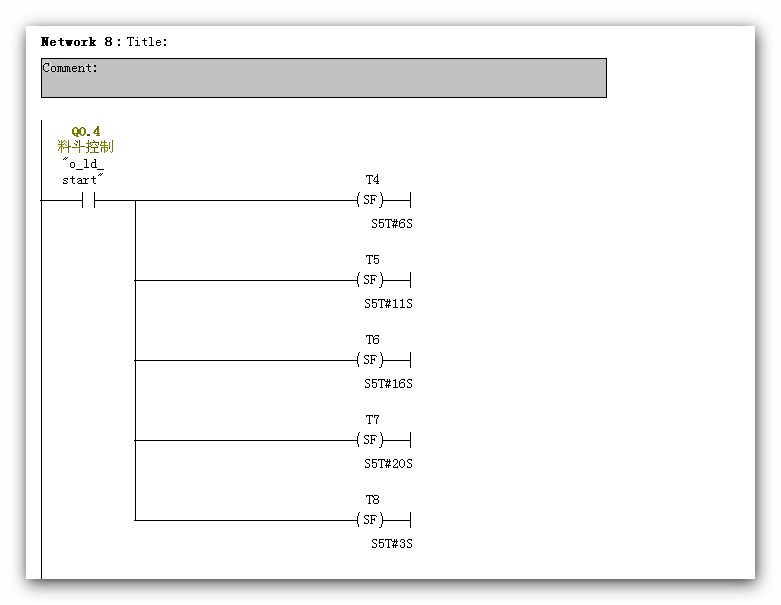
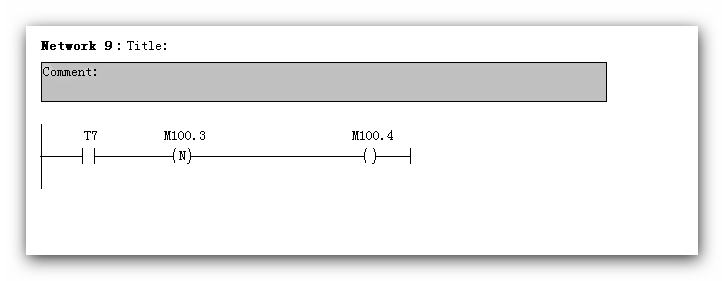
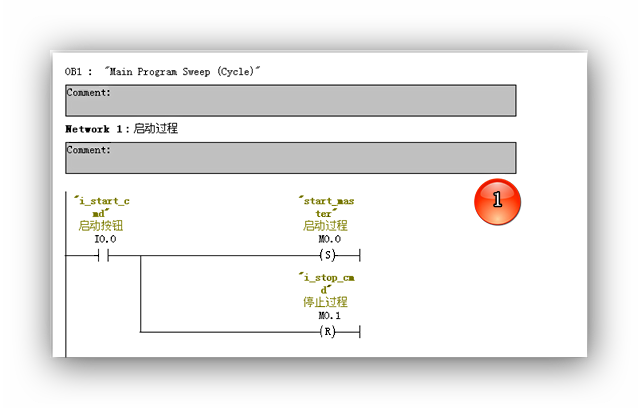
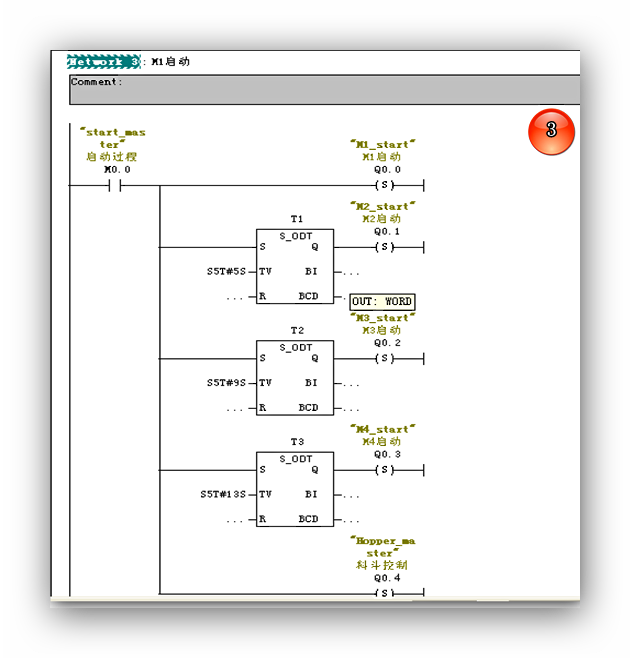
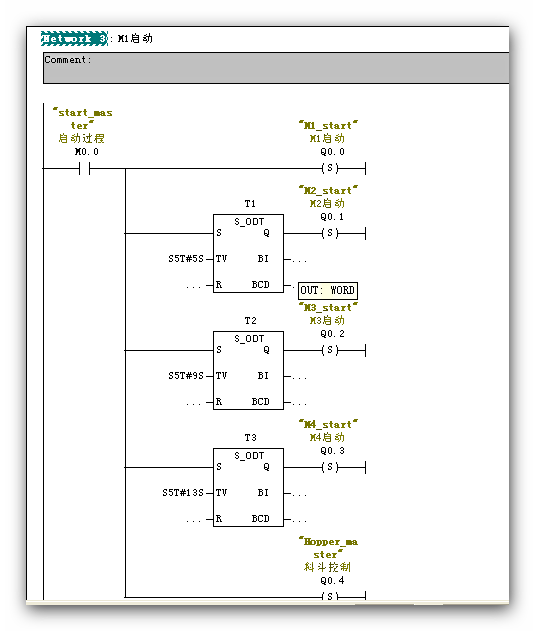
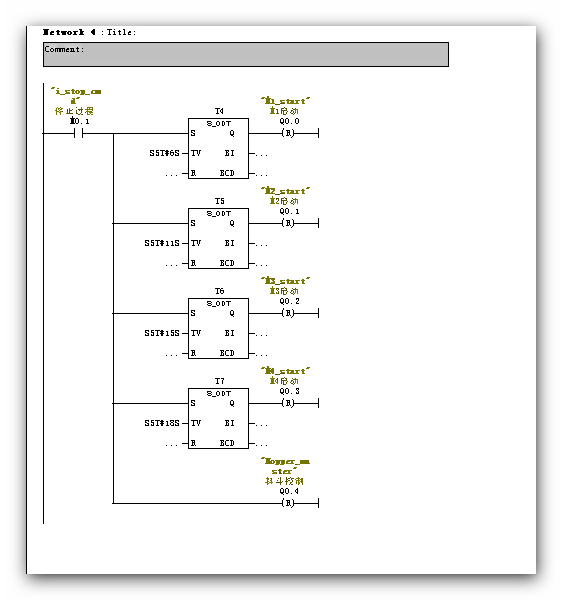
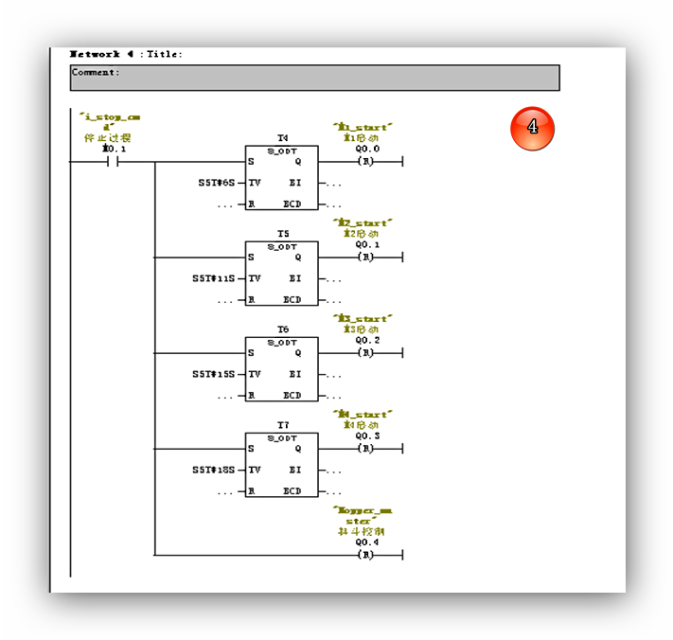
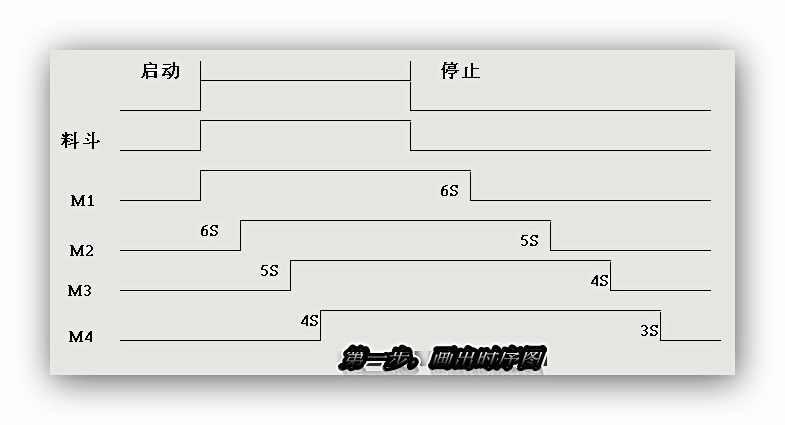
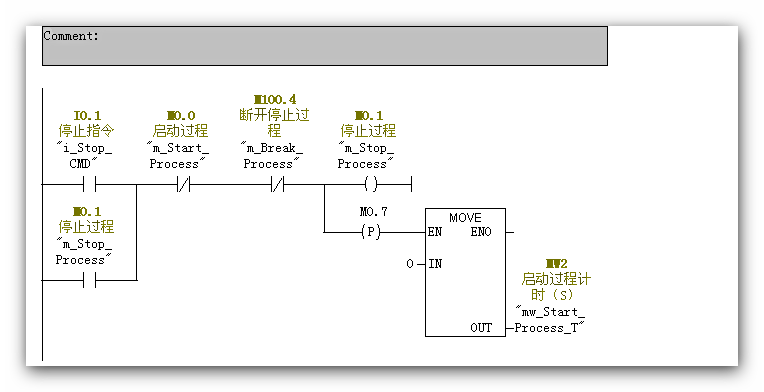
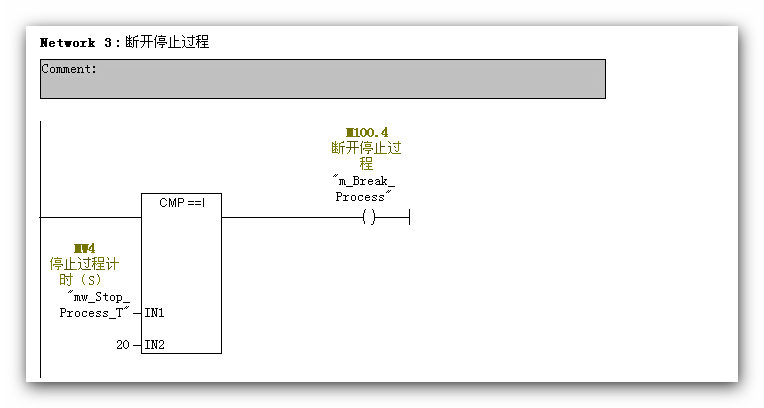
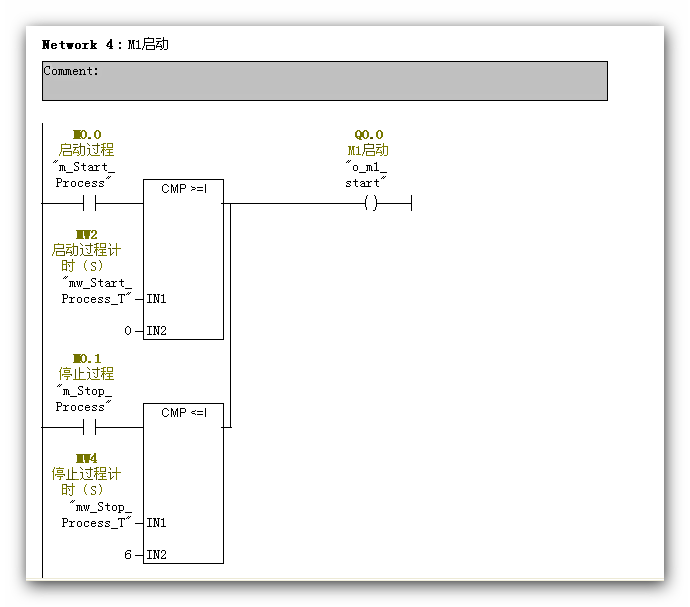
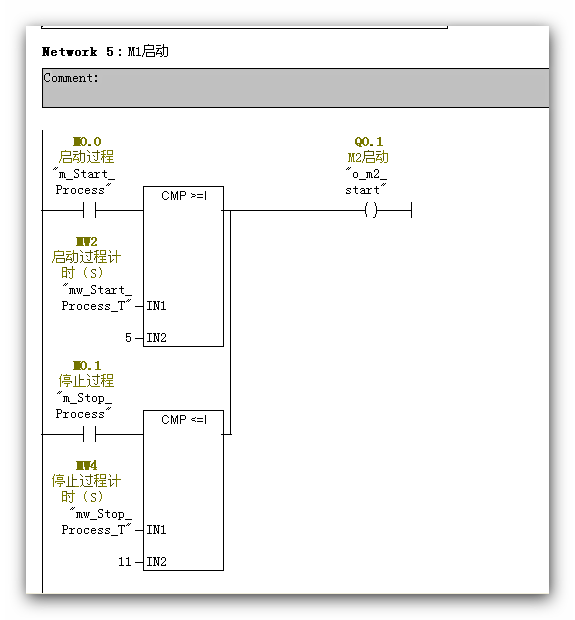
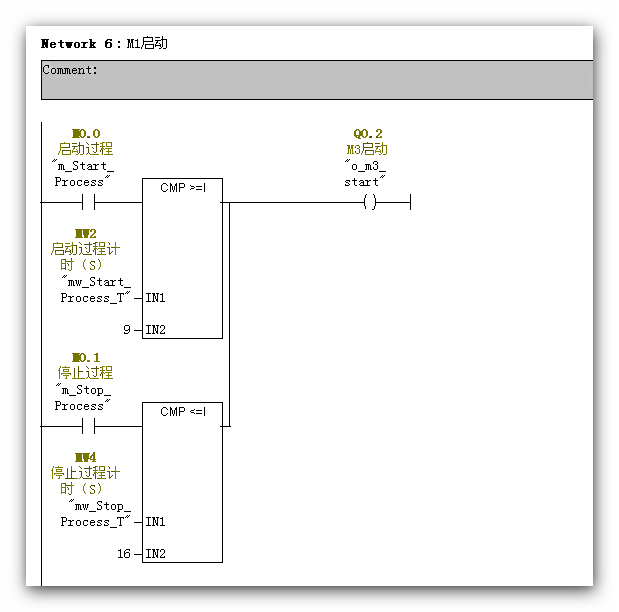
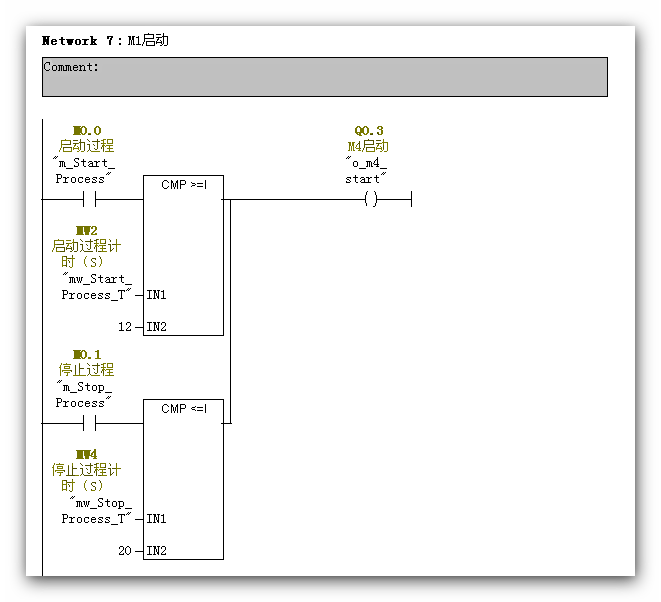
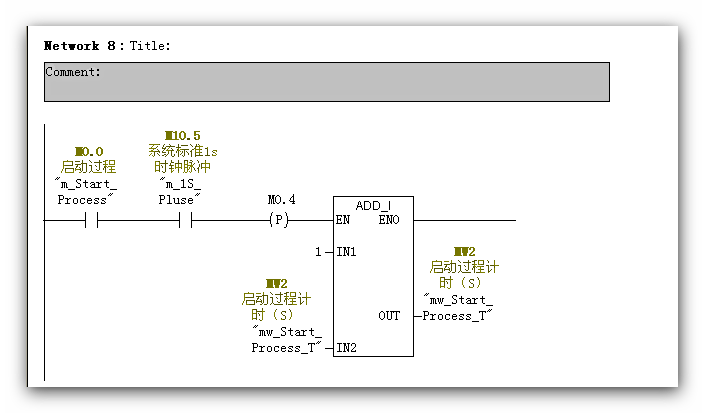
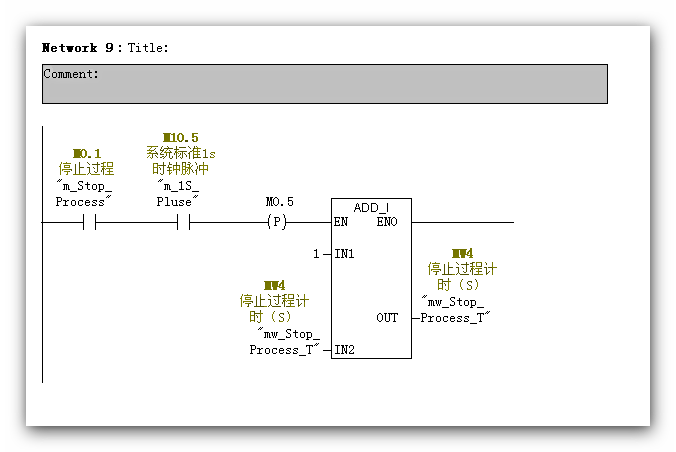
【例】多级皮带运输机控制 如图所示是一个四级传送带系统示意图。整个系统有四台电动机M1、M2、M3、M4,落料漏斗Y0由一 阀控制。控制要求如下: <1>落料漏斗启动后,传送带M1应马上启动,经6s后须启动传送带M2。 <2>传送带M2启动后5S后应启动传送带M3 <3>传送带M3启动后4s后应启动传送带M4 <4>落料停止后,应根据所需传送时间的差别,分别隔3s、4s、5s、6s将、M1、M2、M3、M4四台电动机停车。 <5>其中I0.0为启动按钮,I0.1为停止按钮。Q0.4控制落料,Q0.0~Q0.3分别控制4台电动机。 【编程实例一】: 编程思想:用计时器来控制电机的启停。 【编程实例二】: 编程思想:用时间继电器和置位与复位指令来实现电机的启停。 【编程实例三】: 编程思想:用CPU时钟存储器作为定时器和比较指令来控制电机的启停。 第三步 用CPU时钟存储器作为定时器和比较指令来控制电机的启停 【编程实例四】 编程思想:用MOVE,CMP指令,CPU时钟储存器,由启动和停止过程共同来实现电机的启停。
| 














 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

