只需一步,快速开始
热门: 51单片机 | 24小时必答区 | 单片机教程 | 单片机DIY制作 | STM32 | Cortex M3 | 模数电子 | 电子DIY制作 | 音响/功放 | 拆机乐园 | Arduino | 嵌入式OS | 程序设计
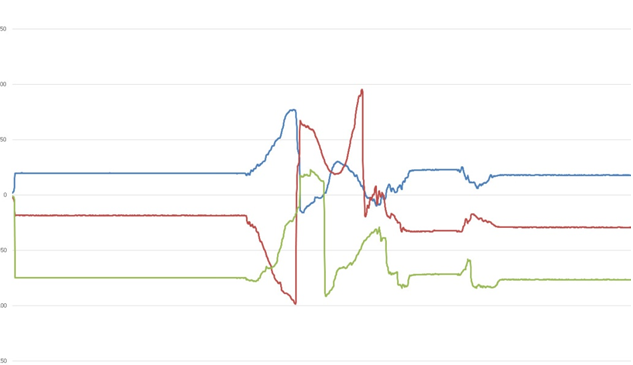
MPU6050六轴陀螺仪作用于四轴无人机,平衡车,机器人等等的电子实作当中,用于姿态判断,掌握了可以发挥自己的想象完成更多更有趣的作品。 本例程输出XYZ的角度,正负90度。运用卡尔曼滤波算法解算姿态,感觉算是比 ...
手机版|小黑屋|51黑电子论坛 | 管理员QQ:125739409;技术交流QQ群281945664
Powered by 单片机教程网
 收藏
收藏 顶
顶 踩
踩

