七届飞思卡尔比赛之后,我想写点东西,算是对飞思卡尔摄像头组比赛的一点心得和看法。算是为本科阶段的比赛做个总结。
众所周知,飞思卡尔的比赛有两个关键的电路设计,电机驱动电路和道路传感器电路。对于摄像头赛题,道路传感器是现成的(当然不排除很多学校自行设计开发的摄像头比如针孔摄像头等等),重点在对于道路传感器的返回信号处理上。在这我会分析一个现有的几大处理方式,并且给我出的设计方案。 摄像头选型模拟和数字,这一直是让人不知道如何取舍的问题。模拟摄像头的高功耗,主动采光,低噪声,受人青睐。而数字摄像头的采光补偿,数字输出,低功耗也让人颇为心动。连续六届飞思卡尔比赛,都是采用16位单片机,相对于数字摄像头的大信息量。有的队伍采用了AL422B这样的FIFO(先进先出寄存器)作为信号寄存器,从而采集到更多的,更大的信息量。在80M的主频下,XS128能读取一行的点数大约为106个,我做过一个尝试,大约40行就是XS128的存储极限了,这样,不利于程序的运行和图形的分析。而那时候的模拟摄像头加二值化电路却是风靡一时。无论是清华的DA动态阈值,北科的电容迟滞比较电路,都是不可超越的经典。电压比较器,算是被用到了极致。当时淘宝上,一片北科的AD8032被炒作到20元一片,可见一斑。从固定阈值电路到带滞回的阈值电路,再到动态二值化,电路越来越复杂,随之问题也越来越多。后来,手创还利用简单的PNP反相器电路,设计了一个将PAL信号反相后比较的电压比较器。号称自动阈值,效果之烂,设计之瑕疵,处处可见。 怎么说呢,在16位单片机时代,数字摄像头确实不是很好的选择。但是,当第七届开放了32位单片机后,强大的DMA和堪称神速的兆级IO口读写速度,超大的RAM,让数字摄像头的崛起成为了可能。图像可以完全被采集和处理,处理速度也是毫厘之间,K10成为了摄像头组新的宠儿。 相比之下的模拟摄像头,由于依仗了模拟电路处理视频信号,其不灵活性,复杂性导致了各种未知问题的出现。不论是中断采集信号,还是IO读取信号的处理方式,都让XS128颇为吃力。同时多个中断的开启,对XS128更是噩梦。 总有人说,数字摄像头特性不好不好,额,好吧我同意。但是这些不厌其烦的强调数字和模拟区别的人,却忽略了最根本的一点。那就是什么是数字,什么是模拟。数字摄像头,最根本的就是CMOS元件。模拟摄像头大多是CCD元件。前面说的模拟摄像头就是CCD元件的。这种摄像头是主动采光式。而CMOS则是被动受光式。很多强调模拟信号无敌的人得嘴里,OV5116P是一个神话一般的摄像头。请注意,这个摄像头是CMOS的!换句话说,这个摄像头的图像输出是和OV7620并无二致,如果说有区别,只能是输出信号的却别。北科能用这种摄像头跑出全国之最,并不能说明数字摄像头的落伍,只能说明CMOS的强大。相比之下,我非常喜欢CMOS摄像头自动曝光功能。虽然这个功能影响了图像的动态性,但是却帮助我们轻而易举的设定固定阈值,应对各种环境,其可靠性,要远远大于自行设计的模拟电路。这是CMOS的优势。而在这个条件下,我更青睐CMOS摄像头,至于数字的OV7620还是模拟的OV5116会在下文做出分析。 信号调理电路设计首先贴出几种CMOS摄像头的图片
OV5116P OV7620
索尼CCD 基本上OV5116是最小的,最轻的,也是最简单的。 在这里,想说的就是摄像头的问题,为什么这么多学校选择OV5116,最重要的一点,线少,板子轻便。摄像头的矛盾在于失真和高度,前瞻,角度之间的矛盾。摄像头的高度越高,角度越小,或者说越趋近于平行,那么失真就越小,但是随之而来的,重心太高,采集角度太广,容易出现杂波。 上海交大采用了数字的针孔摄像头,平行安装,高度30cm+其目的就是为了得到失真小,图像范围适中的图像。 同样,优秀的智能车设计中,摄像头近乎平行放置是非常重要的,但是,这种放置的图像太过宽阔,需要人为矫正,并且这种放置方法也不利于防止光线干扰。 南方的摄像头组一般倾向于低重心,平行的数字摄像头。而北方却倾向于二值化的数字摄像头,架高。很有南北方的特色。 北方的做法确定了北方的模拟必然发展迅速,南方的做法也为南方的数字打下了基础。 个人非常赞同北方的做法,但是很不喜欢北方的调理电路,复杂多变。 CCD的采光是主动式,但是也正因如此,CCD不具有自动补偿功能,所谓的分割阈值变化,主要是来自架高摄像头带来的问题和前瞻过远的影响。所以0V5116P正是很好的解决这一问题的方法,但是同类的摄像头不止OV5116P,OV5116P的图像稳定性也并非最好,大家可以自己去探讨有没有更好的摄像头。当PAL输出信号能自动补偿后,那些复杂的外围电路就可以忽略,简单的阈值比较器足以。 另外,视频缓冲器也是很重要一部分,这相当于变相的提高了阈值电压精度,保证修PAL信号的稳定。贴一下LM1881和视频缓冲器的电路。


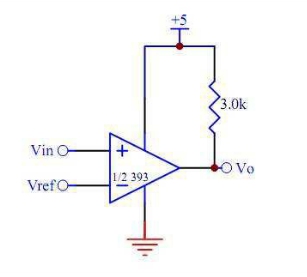
视频缓冲器 在这里强调一个概念PAL信号需要75欧阻抗输出,当然在智能车中无关紧要。 再来个LM393的单限比较器
当然这一切电路的基础是建立在稳定的信号输出的基础上,OV5116P并不能满足需求。
|