���ֵ��ӿƼ���ѧ��ҵ��ƣ����ģ�������ֽ �� 1 ҳ �� 47 ҳ
����
��������Ԫ�������в���R��C��L���DZ�����϶࣬����Ҳ���в�ͬ������������ȱ�㡣һ��IJ������������ڼ��㸴�ӡ�����ʵ���Զ��������Һ���ʵ�����ܻ������������ǰѵ���Ԫ���IJ���R��C��Lת����Ƶ���ź�f��Ȼ���õ�Ƭ�����������������R��C��L��������ʾ��ת��ԭ���ֱ���RC��LC����ʽ���������ܹ���ģ�������Ƶ�ת��λ����������Ƶ��f�ǵ�Ƭ�������״��������������������ֻ��Ĵ���һ�������ʹ�DZ�ʵ�����ܻ���
1 Ӳ����·
1.1 ���Ҫ��
��Ʋ�����һ̨������ʾ�ĵ��衢���ݺ͵�в��������ǣ�����Ҫ���������£�
��1��������������100

~1M

������100PF~10000PF�����100UH~10mH��
��2���������ȣ�

5%������4λ�������ʾ������ʾ������ֵ�����÷�������ֱܷ�֪ʶ����Ԫ�������ͺ͵�λ��
��3�����������������ܣ���������Ϊ6.8Kŷķ�����������������Kŷķ���������С��100ŷķ����������������С��100ŷķ����
1.2 ��·����ͼ��˵��
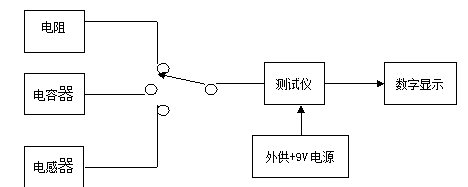
ϵͳ�����֣��Ȳ�����·��ͨ��ѡ��Ϳ��Ƶ�·����ͼ1.2.1��
ͼ1.2.1 RLC�����ǵ�·����ͼ
1.3 �����ֵ�·���
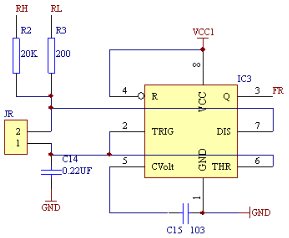
1.3.1 ���������·
����IJ������á����������������ͼ1.3.1��ʾ��555��·���ɵĶ�г��·��ͨ�������������Ƶ�������㱻�����Ĵ�С��
555�ӳɶ�г��������ʽ����������Ϊ��
T=t1+t2=��ln2����R1+Rx��*C1+��ln2��Rx*C1
�õ���Fx=1/[��ln2��(R2+2Rx)C1]����Rx=[1/(ln2)C1-R1]/2
��·��Ϊ2��: RH����Ϊ�ߵ�ƽ�����RL��Ϊ�͵�ƽ�����
1�� 100��Rx<1000ŷķ��
R3=200ŷķ��C14=0.22uF��
Rx=(6.56*(1e+6))/(2*fx)-330/2
��Ӧ��Ƶ�ʷ�ΧΪ��2.8K��fx <16K
2�� 1000��Rx<1Mŷķ��
R2=20kŷķ��C1=103PF��
Rx =(1.443*(1e+8))/(2*fx)-(1e+4)
��Ӧ��Ƶ�ʷ�ΧΪ��141Hz��fx<6.8K
ͼ1.3.1 ���������·
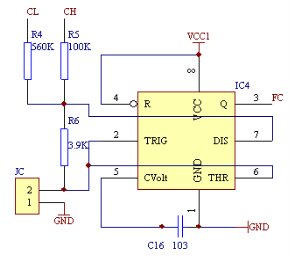
1.3.2 ���ݲ�����·
���ݵIJ���ͬ�����á����������������ͼ1.3.2��ʾ��555��·���ɵĶ�г��·��ͨ�������������Ƶ�������㱻����ݵĴ�С��555�ӳɶ�г��������ʽ����������Ϊ��
T=t1+t2=��ln2����R1+R2��*Cx+��ln2��R2*Cx
��������R1=R2;
�õ���Fx=1/[3(ln2)R1*Cx]����Cx=1/[3(ln2)R1*Fx]
��·��Ϊ2��:
1�� R1��560Kŷķ��CL����Ϊ�ߵ�ƽ�����
R4=R6��
Cx= (0.94*(1e+6))/ fx��
��Ӧ��Ƶ�ʷ�ΧΪ��9.4K��fx <0.94K��
2�� R1��100Kŷķ�� CH����Ϊ�ߵ�ƽ�����
R5=R6��
Cx =(4.81*(1e+6))/ fx;
��Ӧ��Ƶ�ʷ�ΧΪ��480Hz��fx <4.8K��
ͼ1.3.2 ���ݲ�����·
1.3.3 ��в�����·
��еIJ����Dz��õ�������ʽ��·��ʵ�ֵġ�����ʽ��·��ָ��LC��·���뷢�伫�����������翹Ԫ��������ͬ���ʵģ�����һ���翹Ԫ������Ϊ�����ʵģ����뷢�伫�����������翹Ԫ��ͬΪ����ʱ������ʽ��·����Ϊ��������ʽ��·��
Fx=1/(2��

)����Lx=1/( 4��*��*Fx*Fx)
Lx=[38*(1e+6)]/

ͼ1.3.3 ��в�����·
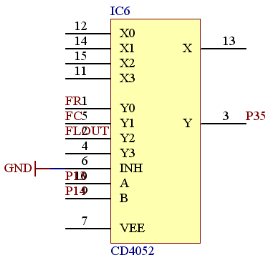
1.3.4 ��·ѡ�ص�·
����CD4052ʵ�ֲ�������ת����CD4052��˫4ѡһ��ģ���ѡ����������ѡ����ijһͨ����Ƶ�ʺ����Ƶ��ͨ��ͨ��P35��ΪCPU��ʱ����ʱ��Դ����ʼ��������������3��������������ֵ������3�͵õ��˱���R/C/L����Ӧ������Ƶ�ʣ�ͨ������õ�Ҫ����ֵ��
ͼ1.3.4 ��·ѡ�ص�·
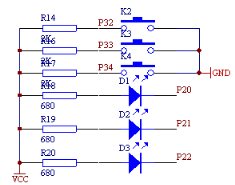
1.3.5 ��������ʾ��·
�����Ͷ����ֱܷ��ʾ��ͬ���IJ��������±���ʾ��
ͼ1.3.5.1 ����ѡ����ָʾ��·
ͼ1.3.5.2 ��ʾģ��1
���������Ҫ��ʾ���������Ƕ����� 74LS390�������߶��������ʮ��������ʾ���������������ͼ��
ͼ1.3.5.3 ��ʾģ��2
1.3.6 ��Ƭ��ģ��
��Ƭ��ϵͳ������ͼ1.3.6��ʾ��
ͼ1.3.6 ��Ƭ��ģ��
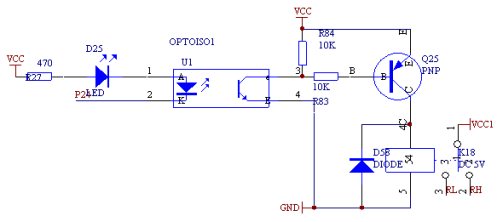
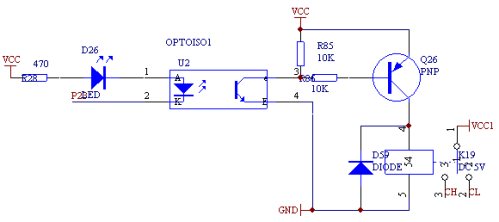
1.3.7 ����ѡ��ģ��
������������ѡ��ģ��͵�������ѡ��ģ�飬��ͼ1.3.7.1��1.3.7.2��ʾ��
ͼ1.3.7.1��������ѡ��ģ��
ͼ1.3.7.2 ��������ѡ��ģ��
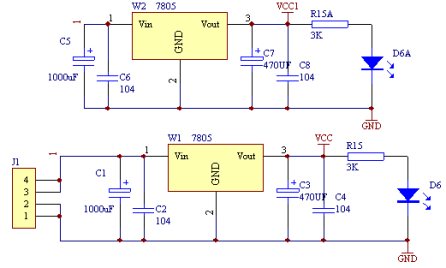
1.3.8 ��Դģ��
��Դģ����ͼ1.3.8��ʾ��
ͼ1.3.8 ��Դģ��
2 ��������
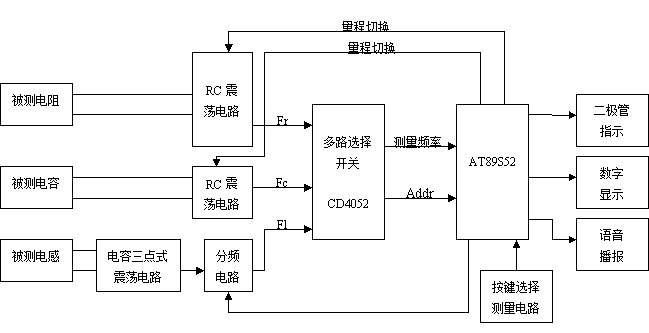
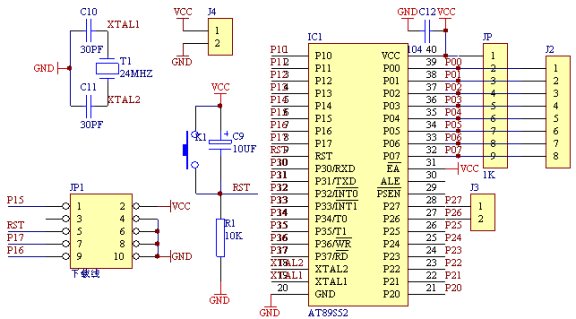
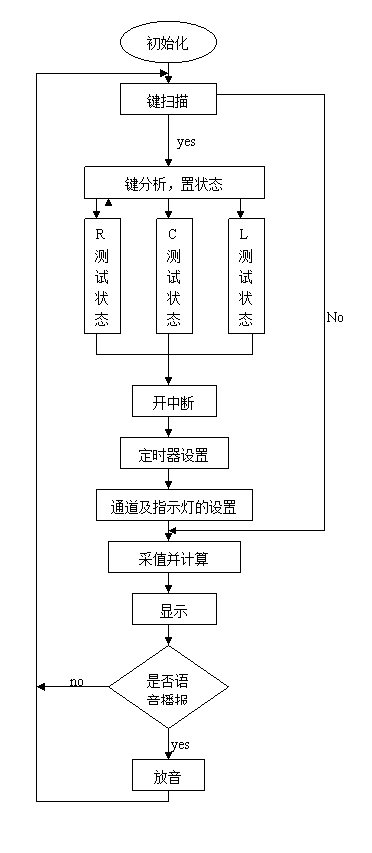
2.1 ����������ͼ
��ͼ2.1��ʾ��
ͼ2.1 ����������ͼ
AT89S52��Ƭ���Ļ�������
����֪����������Ƶ��ΧԼ�ڼ�ʮ����ǧ���ȣ��������ó��������Ƶ�����ij�����ߵġ��ߡ���ƽ��͵�ƽ�����ڸÿ����Ͼ��ܲ���һ��Ƶ�ʵľ��β����������Ⱦ��ܷ���һ��Ƶ�ʵ�����������������ʱ������ơ��ߡ����͡���ƽ�ij���ʱ�䣬���ܸı����Ƶ�ʣ��Ӷ��ı�������
���磬Ҫ����200HZ����Ƶ�źţ�ʵ�����Ϊ��
�����ӳ���DELΪ��ʱ�ӳ���R3Ϊ1ʱ����ʱʱ��ԼΪ20us��R3�д����ʱ��������200HZ��Ƶ��������Ϊ1/200�룬��5ms����������P1.4�ĸߵ�ƽ��͵�ƽ�ij���ʱ��Ϊ2.5ms����R3��ʱ�䳣��ȡ2500/20=125(7DH)ʱ�����ܷ���200HZ�����������������ѧϰ������������R3�ij����ܸе������ı仯�������У�ÿһ������Ӧ��ȷ����Ƶ�ʡ������ܸ��ݱ�1�������ij���������16���ƴ�������R3��������ϰ��ᡣ���ݱ�1��������������������Ҫȷ���һ�����ӣ�����ȷ�ؿ����������࣬��һ�����ij���ʱ�䡣
�����Ľ����������ö�ʱ��T0�����ƣ����벻һ���ij�ֵ�����ܲ�����һ���Ķ�ʱʱ�䡣����ij�����Ľ���Ϊÿ����94�ģ���һ��Ϊ0.64�롣
���ǣ�����T0�����ʱʱ��ֻ��Ϊ131���룬��˲�����ֱ���øı�T0��ʱ���ֵ��ʵ�ֲ�һ�����ġ���������T0������10�����ʱ�����Ȼ������һ���жϼ�������ͨ���б��жϼ�������ֵ�����ƽ���ʱ��ij��̡���2��Ҳ�����˸��ֽ�������Ӧ��ʱ�䳣���������1/4����������ʱʱ��Ϊ0.16�룬��Ӧ��ʱ�䳣��Ϊ16����10H������3����������ʱʱ��Ϊ1.92�룬��Ӧʱ�䳤��Ϊ192����C0H����
���ǽ�ÿһ������ʱ�䳣�������Ӧ�Ľ��ij�����Ϊһ�飬�����������е����г������г�һ������Ȼ���ɲ����������ȡ�����������������ƽ��࣬����ʵ������Ч�������⣬����������ֹ���ֱܷ��ô���00H��FFH����ʾ����������Ϊ00H�����ʾ�������ˣ���������ΪFFH���������Ӧ��ͣ��Ч����Ϊ�˲����ֵ��Ľ���У���ijЩ����������������ͬ������������һ��ʱ�䵥λ��Ƶ�����в�һ����������
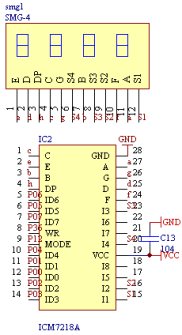
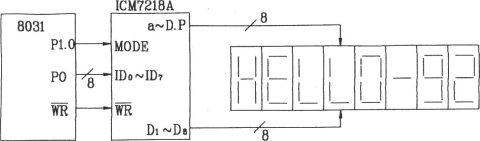
3.3 ICM7218����
ICM72 1 8A��ͨ������������� ,���Ʒ�ʽ����� ,������8λ�������ӿ� .�ɹ㷺Ӧ���ڵ�Դ�������DZ�����ʾ�С�
ͼ3.3.1
ICM7218A�ɹ�����������ʾģ�飺��������ʾģʽ��ʮ������������ʾģʽ��ʮ����������ʾģʽ������˵�����£�
�ڷ�����ģʽ�£�д��������ʱID5=��1��������������ֱ�ӿ��ƶ�λ������������ݺͶ�λ��ʾ��Ӧ���3.3.1��ʾ��������ģʽ�£�д������ʮID5=��0����������д��������ʱѡ���乤����ʮ������������ʾģʽ��ID6=��1������ʮ����������ʾģʽ��ID6=��0�������������������ʮ������ʾ�롢ʮ��������ʾ���ϵ���3.3.2��ʾ��
ͼ3.3.1
ͼ3.3.2
ICM7218A�Ĺ�����ʽ
ICM7218A��ͨ����������ID4λ��������������������ʽ��NORMALOPERTION����ֹͣ������ʽ��SHUTDOWN����
������������ʽ�£�ID4=��1��������MODEΪ�ߵ�ƽʱ����WRITE�ź���Чʱ�����������������ߵ�ID4-ID7λд����������֣���ʱID0-ID3λ������Ч��MODEΪ��ƽʱ����WRITE�ź���Чʱ������������д��8��8λ��ʾ���ݣ�������д������У���ʾ��ֹͣ������֪��8������д�꣬��ʾ����ʾ������ֵ��
ע1��������������һλ��ʾ���ݣ���������ִ���������̣�����ֱ������һλ��ʾ���ݾ���Ч��
ע2��ÿ�α�����������8��8λ��ʾ����֮����ʾ������������������ʹ��ʾλ������8λҲ��������8�����ݣ���8������֮���������Ч��
��ֹͣ������ʽ�£�ID4=��0������д�������ֺ���ʾ��ֹͣ��ʾ�����ɵ�·����ʡ��״̬��
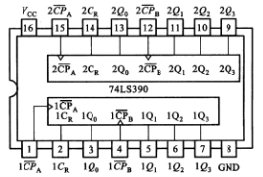
3.4 74LS390����
74LS390��˫ʮ���Ƽ���������������2��Ƶ������5��Ƶ����������������ʵ��2��Ƶ��5��Ƶֱ��100��Ƶ���κ��ۼӱ����ļ������ȣ�74LS390���ŵ�·����ϣ�����ʵ��������Ƶ�λ��������
�������������Ҫ��ʾ�����������Ƕ��������Լ������������ʾ��·ͨ�����ʹ�á�����������ֹ��ܵ�оƬ�ܶ࣬Ҫ���ʹ��Ŀ��ѡ�ú��ʵ�оƬ������������Ҫ��ʮ��������ʾ������������������������ֱ�������߶�����ܵ�������������
��ͼ3.4.1��оƬ74LS390��������ʮ���Ƽ�������CR������ˣ��ߵ�ƽ��Ч���� ��
�� ��CP���壬Q0��Q1��Q2��Q3Ϊ4������������
��CP���壬Q0��Q1��Q2��Q3Ϊ4������������ ������ֻ��Q0�����������
������ֻ��Q0����������� ��������Q1��Q2��Q3��������������ʱ��������Ϊ5������74LS390����ʵ�ֶ����ơ�����Ƽ����������Q0ֱ����
��������Q1��Q2��Q3��������������ʱ��������Ϊ5������74LS390����ʵ�ֶ����ơ�����Ƽ����������Q0ֱ���� ��������
�������� ��CP���壬�����ʵ��8421ʮ���Ƽ�����
��CP���壬�����ʵ��8421ʮ���Ƽ����� 3.4.1 74LS390�ܽ�����ͼ
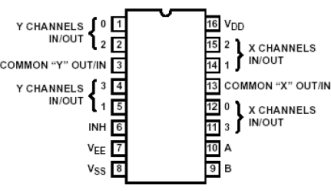
3.5 CD4052����
CD4052��һ��˫4ѡһ�Ķ�·ģ��ѡ�أ���ʹ����ֵ�����3.5.1��ʾ:
��3.5.1
Ӧ��ʱ����ͨ����Ƭ����A/B�Ŀ�����ѡ��������һ·�����磺��Ҫ��4·������ѡ��ڶ�·���룬����ʹ�õ���Y�飬��ô��Ƭ��ֻ��Ҫ�ֱ��A��B��1��0����ѡ�и�·��Ȼ�������Ӧ�Ĵ�����
ע���6��Ϊʹ�ܽţ�ֻ��Ϊ0ʱ���Ż���ͨ����ѡ�����.
ͼ3.5.1 CD4052оƬ�ܽ�ͼ��
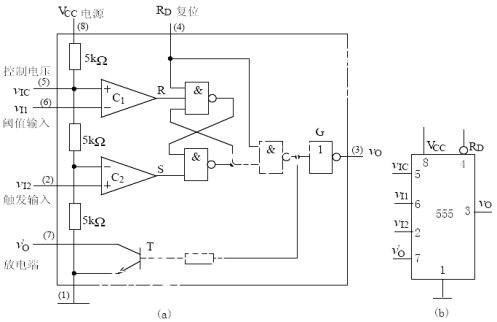
3.6 NE555����
555��ʱ����һ��Ӧ�ü�Ϊ�㷺���й�ģ���ɵ�·���õ�·ʹ�������㣬ֻ���������������Ԫ���Ϳ��Թ��ɵ��ȡ���г��ʩ���ش�����������㷺�����źŵIJ������任���������⡣
Ŀǰ�����Ķ�ʱ����˫���ͺ�CMOS�������ͣ����ͺŷֱ���NE555(��5G555)��C7555�ȶ��֡����ǵĽṹ������ԭ��������ͬ��ͨ����˫���Ͷ�ʱ�����нϴ��������������CMOS ��ʱ�����е��ġ������迹�ߵ��ŵ㡣555��ʱ�������ĵ�Դ��ѹ�ܿ������ɳ��ܽϴ�ĸ��ص�����˫���Ͷ�ʱ����Դ��ѹ��ΧΪ5��16V������ص����ɴ�200mA��CMOS ��ʱ����Դ��ѹ��ΧΪ3��18V������ص�����4mA���¡�
һ����·���
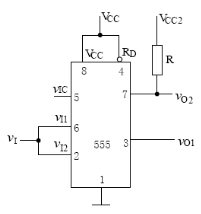
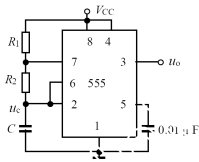
ͼ3.6.1Ϊ555���ɶ�ʱ��555��ʱ���ĵ���ԭ��ͼ�͵�·���ţ��������������ɣ�
��1����������ֵΪ5k�� �ĵ�����ɵķ�ѹ����
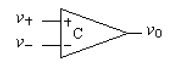 ��2��������ѹ�Ƚ���C1 ��C2��
��2��������ѹ�Ƚ���C1 ��C2��V+��V����Vo=1��
V+��V����Vo=0��
��3������RS ��������
��4���ŵ�������T ��������G��
ͼ3.6.1 555��ʱ���ĵ���ԭ��ͼ�͵�·����
������������
��5������ʱ���Ƚ���C1��C2�ıȽϵ�ѹ�ֱ�Ϊ2Vcc/3��Vcc/3��
��1����V11>2Vcc/3��V23>Vcc/3ʱ���Ƚ���C1����͵�ƽ��C2����ߵ�ƽ������RS����������0���ŵ�������T ��ͨ�������vO Ϊ�͵�ƽ��
��2��V11<2Vcc/3��V23<Vcc/3ʱ���Ƚ���C����ߵ�ƽ��C2����͵�ƽ������RS ����������1���ŵ�������T ��ֹ�������vO Ϊ�ߵ�ƽ��
��3��V11<2Vcc/3��V23>Vcc/3ʱ���Ƚ��� C1 ����ߵ�ƽ��C2Ҳ����ߵ�ƽ��������RS ������R=1��S=1��������״̬���䣬��·�ౣ��ԭ״̬���䡣
������ֵ�����(V11)Ϊ�ߵ�ƽ��>2Vcc/3��ʱ����ʱ������͵�ƽ�����Ҳ���ö˳�Ϊ�ߴ����ˣ�TH����
��Ϊ���������(vI2)Ϊ�͵�ƽ��< 1Vcc/3��ʱ����ʱ������ߵ�ƽ�����Ҳ���ö˳�Ϊ�ʹ����ˣ�TL����
����ڵ�ѹ���ƶˣ�5�ţ�ʩ��һ����ӵ�ѹ����ֵ��0��VCC֮�䣩���Ƚ����IJο���ѹ�������仯����·��Ӧ����ֵ��������ƽҲ����֮�仯��������Ӱ���·�Ĺ���״̬��
���⣬RDΪ��λ����ˣ���RDΪ�͵�ƽʱ��������������˵�״̬��Σ����VoΪ�͵�ƽ����RD�Ŀ��Ƽ�����ߡ���������ʱ��һ��Ӧ����Ӹߵ�ƽ��
��3.6.1 555��ʱ�����ܱ�
�ɵ�·��ͼ���ܱ����Եó����½��ۣ�
1 555��ʱ����������ֵ���ֱ���2Vcc/3��Vcc/3��
2 �����3�źͷŵ��7�ŵ�״̬һ�£�����͵�ƽ��Ӧ�ŵ�ܱ��ͣ���7���������������ʱ��7��Ϊ�͵�ƽ������ߵ�ƽ��Ӧ�ŵ�ܽ�ֹ��������������ʱ��7��Ϊ�ߵ�ƽ��
3 �����״̬�ĸı����ͻ����ز��ѹΪVcc/3��
4 ����봥�����뷴�ࡣ�������������Է���555��ʱ����ɵĵ�·ʮ��������
555Ӧ��
ʩ���ش�����
ʩ���ش�����������ϵͳ�г��õĵ�·֮һ,�����ѱ仯���������岨�α任��Ϊ���ֵ�·����Ҫ�ľ������塣ʩ���ص�·���ص�������Ҳ�������ȶ�״̬,����һ�㴥���������������������ȶ�״̬��ת����Ҫ��Ӵ����ź�,�����ȶ�״̬��ά��ҲҪ��������Ӵ����ź�,������Ĵ�����ʽ�ǵ�ƽ��������
1����·��ɼ�����
ֻҪ��555 ��ʱ����2�Žź�6�ŽŽ���һ�𣬾Ϳ��Թ���ʩ���ش����������Ǽ��Ϊ��������һ����
ͼ3.6.2 555��ʱ�����ɵ�ʩ���ش�������·ͼ
��1�� V1=0V ʱ��Vo1 ����ߵ�ƽ��
��2����V1������2Vcc/3ʱ��Vo1����͵�ƽ����V`��2Vcc/3����������Vo1 ���ֲ��䡣
��3����V1�½���Vcc/3ʱ����·�������Ϊ�ߵ�ƽ��������V1�����½���0Vʱ����·������״̬���䡣
ͼ3.6.2�У�R��VCC2 ������һ�����Vo2����ߵ�ƽ����ͨ���ı�Vcc2���е��ڡ�
2����ѹ�ͻ����Ժ���Ҫ����
��ѹ�ͻ�����
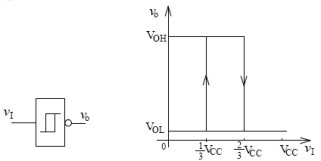
ͼ3.6.3 ʩ���ش������ĵ�·���ź͵�ѹ��������
��Ҫ��̬����
��1��������ֵ��ѹVT+----VI���������У������ѹVO�ɸߵ�ƽVOH ���䵽�͵�ƽVOLʱ������Ӧ�������ѹֵ��VT+ = 2Vcc/3��
��2��������ֵ��ѹVT-----VI�½������У� VO�ɵ͵�ƽVOL ���䵽�ߵ�ƽVOHʱ������Ӧ�������ѹֵ��VT�� =Vcc/3��
��3���ز��ѹ��VT
�ز��ѹ�ֽ��ͻص�ѹ������Ϊ :��VT= VT+��VT�� = Vcc/3
���ڵ�ѹ���ƶ�VIC��5�ţ���ӵ�ѹVS������VT+=VS��VT��=VS/2����VT=VS/2�����ҵ��ı�VS ʱ�����ǵ�ֵҲ��֮�ı䡣
3��ʩ���ش�������Ӧ�þ���
(1)�����ӿڵ�·----�������仯�������źţ�ת����Ϊ����TTLϵͳҪ������岨�Ρ�
(2)�������ε�·----�Ѳ�����������ź����γ�Ϊ�������塣
ͼ3.6.4 �����벨�ε�TTLϵͳ�ӿں��������ε�·�������������
����̬������
����̬���������������ص㣺��һ������һ���ȶ�״̬��һ������״̬���ڶ����������������������£��ܹ����ȶ�״̬��ת������״̬������������״̬ά��һ��ʱ����Զ����ص��ȶ�״̬��������״̬ʱ��ij��̣��봥�������أ��������ڵ�·�����IJ�����
1.��·��ɼ��乤��ԭ��
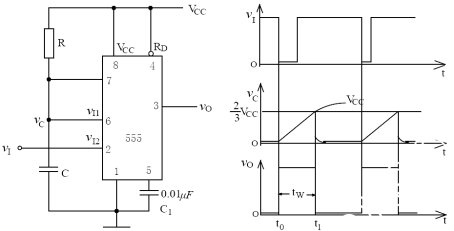
��555���ɵĵ���̬������������������ͼ��ʾ��555��6�Žź�7�ŽŽ���һ�𣬲�����һ�����ݺ�һ������ ���Ϳ��Թ��ɵ���̬���������Ǽ��Ϊ��������һ����R��C����
ͼ3.6.5 ��555��ʱ�����ɵĵ���̬����������������
��1�������ź�����ʱ��·�������ȶ�״̬
����·�����ź�ʱ��VI���ָߵ�ƽ����·�������ȶ�״̬���������VO���ֵ͵�ƽ��555�ڷŵ�������T���͵�ͨ���ܽ�7���ӵء������ݵ�ѹVCΪ0V��
��2��VI �½��ش���
��VI�½��ص���ʱ��555��������ˣ�2�ţ��ɸߵ�ƽ����Ϊ�͵�ƽ����·��������VO�ɵ͵�ƽ����Ϊ�ߵ�ƽ����·����̬ת������̬��
��3������̬��ά��ʱ��
������̬�ڼ䣬555�ڷŵ�������T ��ֹ��VCC��R��C��硣�����·ΪVCC��R��C���أ�ʱ�䳣����1=RC�����ݵ�ѹVC��0V��ʼ�����ڵ��ݵ�ѹVC��������ֵ��ѹ2Vcc/3֮ǰ����·����������̬���䡣
��4���Զ����أ�����̬������ʱ��
��VC��������ֵ��ѹ2Vcc/3ʱ�������ѹVO�ɸߵ�ƽ����Ϊ�͵�ƽ��555�ڷŵ�������T�ɽ�ֹתΪ���͵�ͨ���ܽ�7���ӵء�������C���ŵ������ܶԵ�Ѹ�ٷŵ磬��ѹVC��2Vcc/3Ѹ�ٽ���0V���ŵ������ܵı���ѹ��������·������̬����ת����̬��
��5���ָ�����
������̬��������Cͨ�����͵�ͨ��������T�ŵ磬ʱ�䳣����2=RCESC��ʽ��RCES��T�ı��͵�ͨ���裬����ֵ�dz�С����˦�2ֵ֮��dz�С��������3��5����2����C�ŵ���ϣ��ָ����̽�����
2. ��Ҫ��������
(1) ����������tw
���������Ⱦ�������̬ά��ʱ�䣬Ҳ���Ƕ�ʱ���ݵij��ʱ�䡣��ͼ��ʾ���ݵ�ѹVC �Ĺ������β��ѿ���VC��0+����0V��VC���ޣ�=VCC��VC��tw��=2Vcc/3������RC���ɹ��̼��㹫ʽ���ɵ�tw=1.1ln3��
��ʽ˵��������̬����������������tw�������ڶ�ʱԪ��R��C��ȡֵ�������봥���źź͵�Դ��ѹ�أ�����R��C��ȡֵ�����ɷ���ĵ���tw��
3.����̬��������Ӧ��
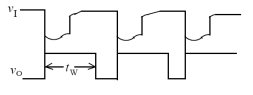
��1����ʱ
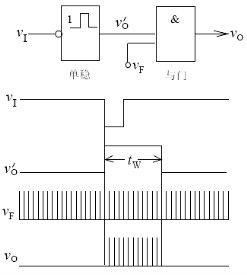
��ͼ3.6.6�У� ���½��ر�WI ���½����ͺ���ʱ��tW�����ӳ���ʱ��tw������̬��������������ʱ���ó���Ӧ����ʱ������С�
���½��ر�WI ���½����ͺ���ʱ��tW�����ӳ���ʱ��tw������̬��������������ʱ���ó���Ӧ����ʱ������С� ��2����ʱ
��ͼ3.6.6�У�����̬�������������ѹ ���������ŵ����붨ʱ�����źţ���
���������ŵ����붨ʱ�����źţ��� Ϊ�ߵ�ƽʱ�����Ŵ�Wo= WF����
Ϊ�ߵ�ƽʱ�����Ŵ�Wo= WF���� Ϊ�͵�ƽʱ�����Źرգ�VoΪ�͵�ƽ����Ȼ���Ŵ�ʱ���Ǻ㶨����ģ����ǵ���̬�������������
Ϊ�͵�ƽʱ�����Źرգ�VoΪ�͵�ƽ����Ȼ���Ŵ�ʱ���Ǻ㶨����ģ����ǵ���̬������������� �Ŀ���tw��
�Ŀ���tw�� ͼ3.6.6 ����̬�����������������ʱ�붨ʱѡͨ
��3������
����̬�������ܹ��Ѳ�����������ź�VI�����γ�Ϊ���ȺͿ��ȶ���ͬ�ı���������Vo��Vo�ķ���ȡ���ڵ���̬��·����ĸߡ��͵�ƽ������tw����������̬ʱ�䡣ͼ3.6.7�ǵ���̬���������ڲ��ε����ε�һ�������ӡ�
ͼ3.6.7 ����̬���������ڲ��ε�����
��г�������������������岨���Լ�����
�����ֵ�·��,������Ҫһ�ֲ�����Ӵ���������ܹ���������һ��Ƶ�ʺͷ��ȵľ��β��ĵ�·�����ھ��β��г�������,�����зḻ�ĸߴ�г���ɷ�,������dz����ֵ�·Ϊ��г���������������������ź�Դ����г����û����̬,ֻ������������̬,���������ص�������,��·������������̬֮������ת����
ͼ3.6.8 ��555��ʱ�����ɵĶ�г����
��ͼ3.6.8Ϊ555��ʱ�����ɵĶ�г��������ͨVCC��VCC��R1��R2��C��硣��uc������2VCC/3 ʱ��uo=0��T��ͨ��Cͨ��R2��T�ŵ磬uc�½�����uc�½���VCC/3ʱ��uo����0��Ϊ1��T��ֹ��VCC�־�R1��R2��C��硣����ظ��������̣��������uo�����������ľ������塣
2.��Ƶ�ʵĹ����ռ�ձȿɵ���·
����C���ʱ�䣺tw1=0.7(R1+R2)C
����C�ŵ�ʱ�䣺tw2=0.7R2C
�����ڣ�T=0.7(R1+2R2)C
�����ڣ�f=1/T=1/[0.7(R1+2R2)]=1.43/[(R1+2R2)C]
ռ�ձȣ�D=tw1/T=0.7(R1+R2)C/[0.7(R1+2R2)]=(R1+R2)/(R1+2R2)
3.7 ����4λLED���������
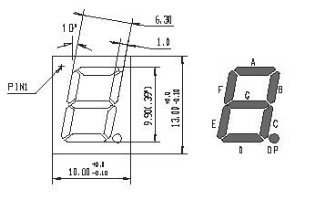
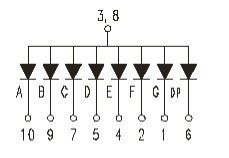
��Ƭ��I/O��Ӧ������͵���ͨ��I/O����7��LED����ܹ�����ʾ��·��7��LED����ܣ�����һ����״�ľ�Ե�����ϣ����õ�ֻLED������гɡ�8�����͵�����ܣ��ֱ��������ǵĵ缫��������Ӧ�ĵ㻮����ʾ��0-9�����֡�
LED����ܸ���LED�Ľӷ���ͬ��Ϊ�����������࣬�˽�LED����Щ���ԣ��Ա���Ǻ���Ҫ�ģ���Ϊ��ͬ���͵�����ܣ��������ǵ�Ӳ����·�в����⣬��̷���Ҳ�Dz�ͬ�ġ���������������ܵķ���ԭ����һ���ģ�ֻ�����ǵĵ�Դ���Բ�ͬ���ѡ�
����ֻLED����������һ��Ϊ����ʽ��������ֻLED����������һ��Ϊ����ʽ���Թ���ʽΪ������������ӵأ�����Ӧ�ε�������������Դ���öμ��ᷢ�⡣��Ȼ��LED�ĵ���ͨ����С��һ������ڻ�·�н����������衣�������ǽ�"b"��"c"�ν�������Դ�������˽ӵػ����գ���ô"b"��"c"�η��⣬��ʱ���������ʾ����ʾ���֡�1��������"a"��"b"��"d"��"e"��"g"�ζ���������Դ�������������գ���ʱ����ܽ���ʾ��2���������ַ�����ʾԭ����ͬ�������з�����
�����ʹ��������
a���μ�С�����ϼ��������裻
b��ʹ�õ�ѹ���Σ����ݷ�����ɫ������С���㣺���ݷ�����ɫ������
c��ʹ�õ�������̬ʱ�ܵ���80mA��ÿ��10mA������̬ʱƽ������4-5mA����ֵ����100mA��
ͼ3.7.1���߶����������ͼ�����й��������������ͼ����������һ���ģ������ʹ��ע������˵����
��1������ܱ��治Ҫ���ִ�������Ҫ����ȥŪ���ǣ�
��2�������¶ȣ�260�ȣ�����ʱ�䣺5S��
��3�������б���Ĥ�IJ�Ʒ,������ʹ��ǰ˺������
ͼ3.7.1 �߶����������ͼ
3.8 �������������
9014,9013,8050������������ܽ�ʶ��
S9014,S9013��S9015��S9012��S9018ϵ�еľ���С���������ܣ�����ʾ����ƽ�泯�Լ���������������Ϊe���伫 b���� c���缫��������С�������������ܰ�ͼʹ��ƽ�泯���Լ����������ų��·��ã������������Ϊe b c,S8050��S8550��C2078 Ҳ�Ǻ����һ���ġ�
��ǰ�����ڸ��־����������кܶ��֣��ܽŵ�����Ҳ����ͬ����ʹ���в�ȷ���ܽ����е������ܣ�������в���ȷ�����ܽ���ȷ��λ�ã������������ñ����������ܵ��������ķ���������ȷ�����ܵ����Լ���Ӧ�ļ������������ϡ�
��9014,9013ϵ�������ܹܽ�ʶ����
�ж������������ñ�R��100��R��1k���������������缫��ÿ������֮��������������ֵ�����õ�һ�����ʽ�ijһ�缫�����ڶ������Ⱥ�Ӵ����������缫����õ���ֵʱ�����һ���������ӵ��Ǹ��缫��Ϊ����b����ʱ��Ҫע�����ñ����ʵļ��ԣ��������ʽӵ��ǻ���b���ڱ��ʷֱ������������ʱ����õ���ֵ����С������ж��������ΪPNP�������ܣ�����ڱ��ʽӵ��ǻ���b������ʷֱ�Ӵ���������ʱ����õ���ֵ��С����������ΪNPN����9013��9014,9018��
�ж������ܼ��缫c�ͷ��伫e��(��PNP��������Ϊ��)�����ñ�����R��100��R��1K��������ʻ���b���úڱ��ʷֱ�Ӵ����������ܽ�ʱ������õ���������ֵ����һ����һЩ��һ��СһЩ������ֵС��һ�β����У��ڱ������ӹܽ�Ϊ���缫������ֵ�ϴ��һ�β����У��ڱ������ӹܽ�Ϊ���伫��
����ж�������ж���û��ķ�����
��ʵ��Ӧ���С�С���������ܶ�ֱ�Ӻ�����ӡˢ��·���ϣ�����Ԫ���İ�װ�ܶȴ�ж�Ƚ��鷳�������ڼ��ʱ����ͨ�������ñ�ֱ����ѹ����ȥ����������Ӹ����ŵĵ�ѹֵ�����ƶ��乤���Ƿ������������ж������ܵĺû���
������9013 ��9014һ��NPN�������ñ�������ǵ����ţ��ڱ��ʽ�һ�������ú�ʷֱ����������������������5K��ֵʱ���ڱ������Ӿ���B������ʱ�úں������ʷֱ�����������������ͬʱ������ʵҲ����������ͷ��ʪһ����ָȻ������ָȥ�������������������ڱ��������Ǹ�����B������ָʾ��ֵС���Ǹ��ڱ����Ӿ���C������������˵Ϊ��ָ������⣬���ֱ�Ϊ����������ñ��ڲ����������Ǻ�ָ�����෴�ġ���
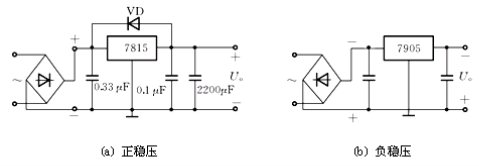
3.9 ������ѹ��LM7805����
7805�dz��õ�������ѹ����������˼��05���������ѹΪ5v������������7805������ƺ�С��
(1) ����������ѹ�������ȶ���ѹ�����������Է�Ϊ78������79����ϵ�С�ͼ3.8.1��������������ѹ�ĵ��͵�·��
ͼ3.8.1 ��������ѹ7805��·
(2) ������ѹ�����ͺŹ��ܽŷֲ���
��3.8.1 ������ѹ�����������ĸ��ʾ��
7805������ѹ�������+5 V��0��5 A���ȶ���ѹ��7912������ѹ������� 12V��1A���ȶ���ѹ��
(3) ���μ��ܽŷֲ����總ͼ3.8.2��ʾ����

ͼ3.8.2 7805,79ϵ��������ѹ�����Ź����������3.10 �̵�������
���ʽ�̵����Ľṹ�빤��ԭ��
���ʽ�̵�����Ӧ�õ����硢����һ����ʽ����ṹ������ԭ����Ӵ���������ͬ���ɵ��ϵͳ������ϵͳ���ͷŵ��ɵ���ɣ����ʽ�̵���ԭ����ͼl��ʾ�����ڼ̵������ڿ��Ƶ�·����������ĵ����Ƚ�С(һ��5A����)���ʲ���Ҫ��װ�á�
���õĵ��ʽ�̵����е�ѹ�̵������м�̵����͵����̵�����
���ʽ�̵���������
�̵�������Ҫ����������-������ԣ��ֳƼ̵����ԡ����̵���������X��������X2��ǰ���̵��������YΪ�㡣��������X���ӵ�X2ʱ���̵������ϣ������ΪY1����X��������Y���ֲ��䡣��X��С��X1ʱ���̵����ͷţ��������Y1��Ϊ�㣬��X������С��Yֵ��Ϊ�㡣
Kf��X1/X2��Ϊ�̵����ķ���ϵ�������Ǽ̵�����Ҫ��֮һ��Kfֵ�ǿ��Ե��ڵġ�
����һ��̵���Ҫ��͵ķ���ϵ����KfֵӦ��0.1��0.4֮�䣬�����̵������Ϻ������������ϴ�ʱ��������������Ƿ��ѹ�̵�����Ҫ��ߵķ���ϵ����Kfֵ��0.6���ϡ���ij�̵���Kf��0.66�����ϵ�ѹΪ���ѹ��90�������ѹ���ڶ��ѹ��50��ʱ���̵����ͷţ���Ƿ��ѹ�������á�
��һ����Ҫ����������ʱ����ͷ�ʱ�䡣����ʱ����ָ����Ȧ���ܵ��źŵ�������ȫ���������ʱ�䣻�ͷ�ʱ����ָ����Ȧʧ�絽������ȫ�ͷ������ʱ�䡣һ��̵���������ʱ�����ͷ�ʱ��Ϊ0.05��0.15s�����ټ̵���Ϊ0.005��0.05s�����Ĵ�СӰ��̵����IJ���Ƶ�ʡ�
4 �����ܽ�
��Ϊ��������������������һ�����Ҫ��ָ�ꡣ������һЩ���������������߾��ȡ�RLC�����������ڲ����г������������⣬�����ڲ��̶�ƫ�ơ�����˵ĸ�����ɢ�����Լ������ź�Դ��б�����������������ϵͳ����Ҫ��Ϊ�й̶�ƫ�ơ���·У�Ͷ�·У��������Ĵ������̶�ƫ����Ҫ����Դ�ڼ���Ư���������ǵ�Ч�ڴ��⽻�����ϵ�����ijһ�̶���ֱ����ѹ���̶�ƫ�ƿ�ͨ���������Կ۳�����һ�������IJ����к�8�β�����ǰ�Ĵβ�����X��Y��������ȡ�ã����Ĵβ������������X��Y�ĸ�����ȡ�á�Ȼ���ٰ�ǰ�Ĵβ����������Ĵβ��������������磬ͨ����ƫ����ΪM��ǰ�Ĵβ���ֵΪ��N+M�����Ĵβ������Ϊ-N+M�������õ���Ȼ�����������2N��������������ƫ������RLC���������ǵIJ����ˡ����������Լ������о����Ǵ��ڲ����迹�Ͳ��ർ�ɡ���Щ��������С���ݡ�С��л�ߵ���IJ�������ɽϴ���У���Ļ���˼������ͨ�����۷�������ϵͳ�����ģ�ͣ������������ʽ��Ȼ��ͨ���ġ���·��������·����У������¼��������ӣ�����������������ʽ����������Զ������������������ͳ�Ʒ������ۣ��漴������ͨ������ظ�������ƽ��������������ͨ����̵ķ�ʽ�Ա����������������Ȼ����ƽ���İ취�������漴��
����֮ǰ��Ҫ�������ñ������һ����·�Ƿ��п�·���߶�·���ڼ�����·����ͨ��֮����оƬ����¼��������·û��������������Ҫ�Ӹ���������ԭ������оƬ�����ݡ���������ܵ������������Ƿ��ԣ��Ƿ����麸����·�Ͷ�·����һ�ε���ʱ������ܷ�������쳣������ȷ����Դ�Ƿ��������絽оƬ���������ñ�����ŷ��ַ�����ǻ��ģ����̻��Ϻõķ���ܡ���ʵ����ϳɹ����Ժó���֮����¼�����Լ��İ��ϣ�ȴ��������λ����ܲ�����ʾ�����Ҿ����ھ��������������⡢��·�����������Ԫ������������֮���������Ų飬�����Ұѹ���������ܵ��������Ľ���ȥ�ˡ����˹��������������������ʾ�ˡ�ȷ����·û���κι�����ȱ�ݵ�ʱ���Ұ�ʱ��;����������Ż�����IJ��衣�������췴���ij��������������Ѿ�������ij����нϴ�ĸĶ�������������Ϊ������C���Ե����������ѱ��Ƕ�������ŵİ��ա������ų�˫���֣�ȱһ���ɡ������������һ�������Ż�����һ�������ŵĻ�����KEIL C��������ʾ��������*.HEX�ļ���û����ʾ���ŵĶ�ȱ����ֻ�������Լ�����Ѱ�ң��������������ڱ�д�����ʱ��Ҫע���η������Ա����ڲ��ҳ�������İ�顣���������ĵط���ͬ���е�ʱ������Ӱ�쵽�������������ȶ��ԣ������ص�ʱ��ʹ��Ӧ�Ĺ���û�л�������������ܵ�ʵ�֡�
5 ����
���������һ�ֻ���AT89S52��Ƭ����RLC���ܲ����ǣ�����Ҫ�������£�
��1���ܾ�ȷ���������ݡ���С�����IJ���ֵ��
��2������ʵ�����̵�����Զ�ת���������˹�ѡ��λ��
��3�������������źŵķ��ȹ�Сʱ�������Զ�ʵ������ŴӶ���Ӱ�쾫�ȡ�
��4��AT89S52���С����Ź������ܣ�������֡�����������
��5����ʱ�����Բ����ⲿʱ��Դ��������Ϊ���Ǽ�����·����Ƶ�� �ṩ�˱��������Ҽ��㾫�Ƚϸߣ����Ƽ�
�ɴ˿ɼ����˲����Ǿ��и߶ȵ����ܻ��ͼ��ɻ����ɾ�ȷ�ض�Ԫ�����������в������������ϵ�����������ķ�չ���ƣ��������й�����Ӧ��ǰ����
�� ¼
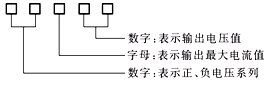
ӡ��PCBͼ��
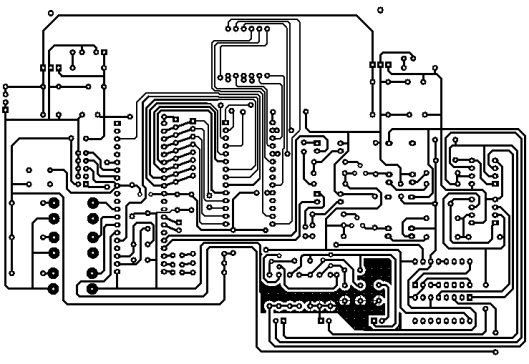
Ԫ��PCBͼ��
��Ƭ��Դ��������:

 ����ԱQQ:125739409;��������QQȺ281945664
����ԱQQ:125739409;��������QQȺ281945664