(穿山乙工作室)三天三十元做出智能车
 0.准备所需基本元器件 1).基本二驱车体一台。(本课以穿山乙推出的基本车体为例讲解) 2).5x7cm洞洞板、单片机卡槽、51单片机、石英晶体、红色LED、1K电阻、10K排阻各一个;2个瓷片电容、排针40个。 3).5x7cm洞洞板、7805稳压芯片、红色LED、1K电阻各一个;双孔接线柱三个、10u电解电容2个、排针12个、9110驱动芯片2个。 4).5x7cm洞洞板、LM324比较器芯片各一个;红外对管三对、4.7K电阻3个、330电阻三个、红色3mmLED三个。
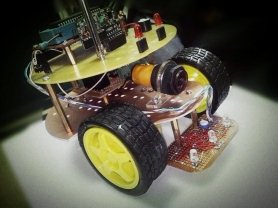
一、组装车体 (图中显示的很清晰吧,照着上螺丝就行了)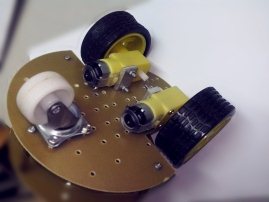  二、制作单片机控制模块 材料:5x7cm洞洞板、单片机卡槽、51单片机、石英晶体、红色LED、1K电阻、10K排阻各一个;2个瓷片电容、排针40个。 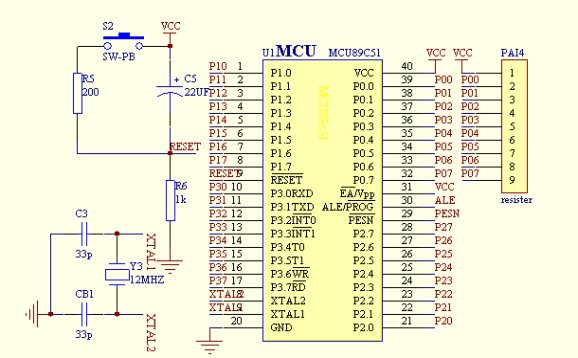 电路图如下,主要目的是把单片机的各个引脚用排针引出来,便于使用。我们也有焊接好的实物图供你参考。(如果你选用的是STC98系列的单片机在这里可以省掉复位电路不焊,仍能正常工作。我实物图中就没焊复位) 电路图如下,主要目的是把单片机的各个引脚用排针引出来,便于使用。我们也有焊接好的实物图供你参考。(如果你选用的是STC98系列的单片机在这里可以省掉复位电路不焊,仍能正常工作。我实物图中就没焊复位)
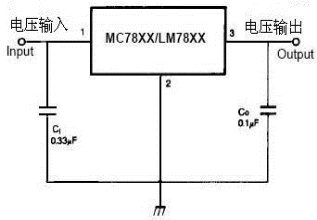
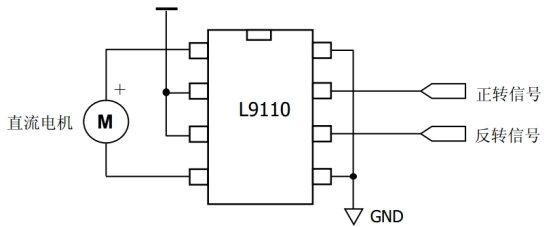
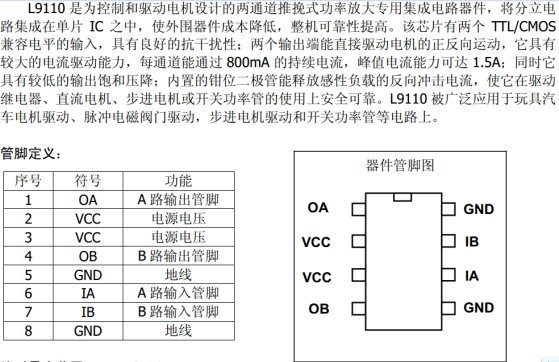
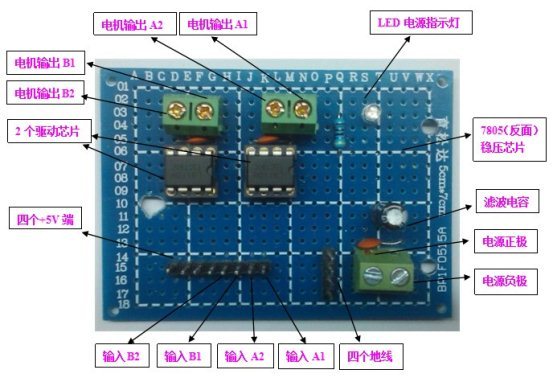
三、制作电机驱动模块 材料:5x7cm洞洞板、7805稳压芯片、红色LED、1K电阻各一个;双孔接线柱三个、10u电解电容2个、排针12个、9110驱动芯片2个。 电路图如下,这里我们把电源模块与驱动模块含在了同一个电路板上。因为电机驱动模块所需的电压是+9V左右(6—15V均可),而单片机主控和循迹模块所需电压均为+5V。 这里用了一个7805稳压芯片将+9V电压稳出+5V电压。
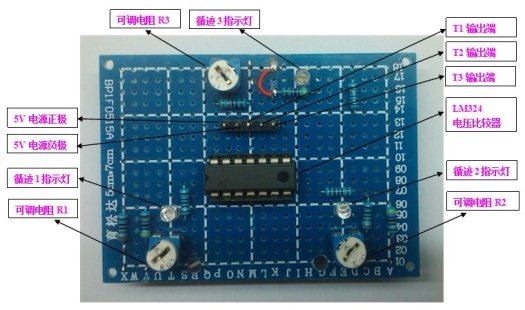
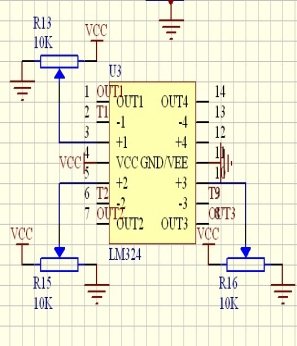
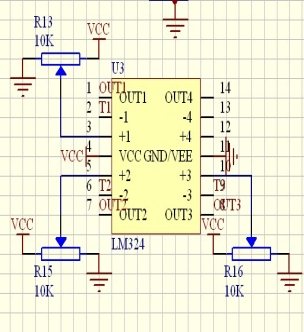
这是工作室做的电源+驱动模块,仅作参考 四、制作循迹模块 材料:5x7cm洞洞板、LM324比较器芯片各一个;红外对管 三对、4.7K电阻3个、330电阻三个、红色3mmLED三个。
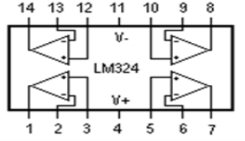
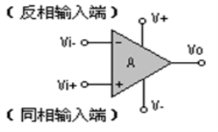
LM324电压比较器工作原理: 该芯片内部有四组比较器,原理就是反相输入端Vi—与同相输入端Vi+的电压进行比较,若Vi+大于Vi—则比较器的输出端OUT输出高电平+5V;若Vi+小于Vi—则比较器的输出 端OUT输出低电平0V;
TCRT5000红外对管工作原理: 工作时由蓝色发射管发射红外线,红外线由遮挡物反射回来被接收管接收。接收反射光线后的接收管呈导通状态,与一电阻串联即可构成一个由发射管控制的分压电路,由此可实现对遮挡物反射光线强度的检测。我们经常利用这一特性去实现黑白颜色识别。
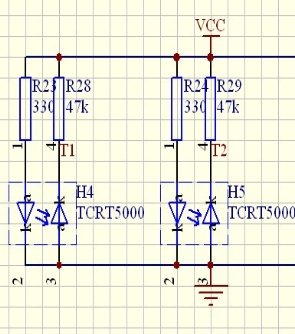
在小车行驶过程中发射管不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。如图12轨迹识别电路所示,发射管(1、2端)与阻值为330欧姆的电阻串联发射红外线。接收管(3、4)与阻值为47K欧姆的电阻串联。在没有接收到反射光线时接收管截止呈高阻态,TX输出高电平。当接收管接收到反射光线时,接收管被导通,并且电阻远小于47K,TX输出低电平。
 五、组装连接各模块 五、组装连接各模块供电分配: 单片机主控模块5V 电机驱动模块7V-12V 黑白线循迹模块5V
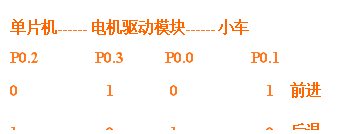
电机驱动输入端分别接单片机的P0.0、P0.1、P0.2、P0.3 (这里建议大家把电机驱动输入端接到单片机的P0上,因为P0口我们外接有上拉电阻,其他IO口虽然集成上拉电阻但驱动能力太弱,很不稳定。如果你把驱动输入端接到P0口仍不太受控,可以尝试将上拉电阻改为1K或更小的。) 循迹模块输出端分别接单片机的P1.0、P1.1、P1.2 注:分别对应 右边的光电管输出端 (从循迹板对应的右边光电管信号输出端接至单片机P1.0)、左边的光电管输出端(从循迹板对应的左边光电管信号输出端接至单片机P1.1)、前边的光电管输出端(从循迹板对应的前边光电管信号输出端接至单片机P1.2)
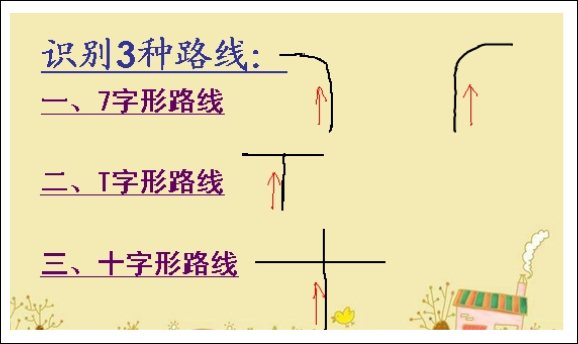
六、各种路线分析
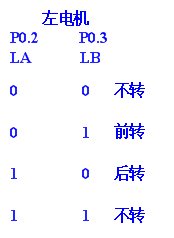
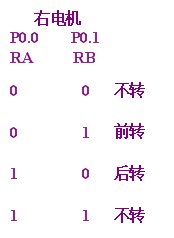
 七、小车运动状态设计 七、小车运动状态设计
八、简单的三路循迹算法设计 源程序请到论坛智能车讨论区下载。 该算法仅供参考,(软件需要配合硬件不同的接法)具体程序代码应由实际情况调试得出!!! 源程序请到穿山乙工作室下载
| 



 [复制链接]
[复制链接]









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

