ПЈНы¶ФУРРиТӘөДИЛУРЛщ°пЦъ
әмНвПЯҪУКХПөНіЈ¬КЗ»щУЪ51өҘЖ¬»ъөДЖХНЁәмНвПЯҪУКХЖчЈ¬ 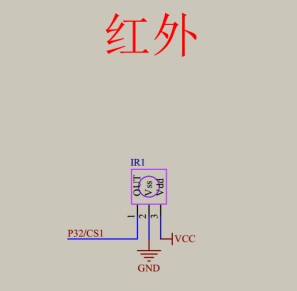
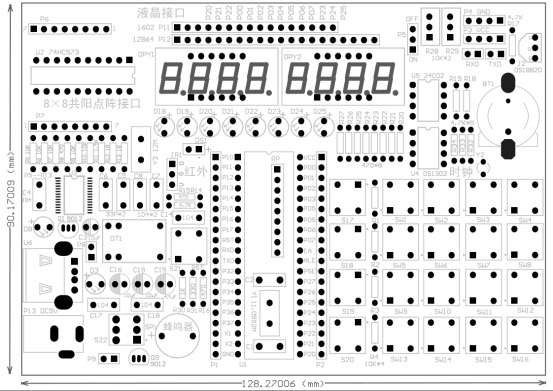
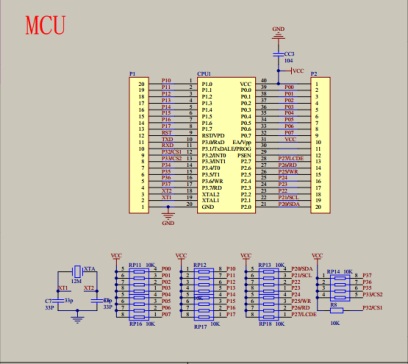
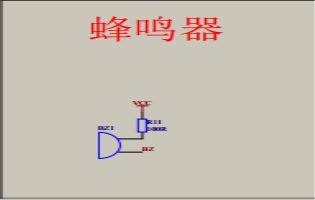
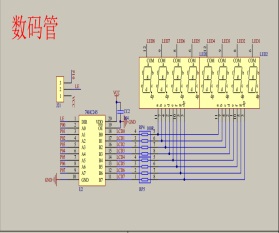
Нј1 әмНвПЯҪУКХЖчФӯАнНј 2.1.КЧПИОТГЗПИҪвКНТ»ПВәмНвПЯЈә ИЛөДСЫҫҰДЬҝҙөҪөДҝЙјы№в°ҙІЁіӨҙУіӨөҪ¶МЕЕБРЈ¬ТАҙООӘәмЎўіИЎў»ЖЎўВМЎўЗаЎўА¶ЎўЧПЎЈЖдЦРәм№вөДІЁіӨ·¶О§ОӘ0.62Ў«0.76ҰМmЈ»ЧП№вөДІЁіӨ·¶О§ОӘ0.38Ў«0.46ҰМmЎЈұИЧП№вІЁіӨ»№¶МөД№вҪРЧПНвПЯЈ¬ұИәм№вІЁіӨ»№іӨөД№вҪРәмНвПЯ.әмНвПЯТЈҝШҫНКЗАыУГІЁіӨОӘ0.76Ў«1.5ҰМmЦ®јдөДҪьәмНвПЯАҙҙ«ЛНҝШЦЖРЕәЕөДЎЈ 2.2 ¶ФУЪәмНвҪУКХЖч¶шСФ әмНвҪУКХЙиұёКЗУЙәмНвҪУКХөзВ·ЎўәмНвҪвВлЎўөзФҙәНУҰУГөзВ·ЧйіЙЎЈәмНвТЈҝШҪУКХЖчөДЦчТӘЧчУГКЗҪ«ТЈҝШ·ўЙдЖч·ўАҙөДәмНв№вРЕәГЧӘ»»іЙөзРЕәЕЈ¬ФЩ·ЕҙуЎўПЮ·щЎўјмІЁЎўХыРОЈ¬РОіЙТЈҝШЦёБоВціеЈ¬КдіцЦБТЈҝШОўҙҰАнЖчЎЈҪьјёДкІ»ВЫКЗТөУаЦЖЧч»№КЗХэКҪІъЖ·Ј¬ҙу¶а¶јІЙУГіЙЖ·әмНвҪУКХН·ЎЈіЙЖ·әмНвҪУКХН·өД·вЧ°ҙуЦВУРБҪЦЦЈәТ»ЦЦІЙУГМъЖӨЖБұОЈ»Т»ЦЦКЗЛЬБП·вЧ°ЎЈҫщУРИэЦ»ТэҪЕЈ¬јҙөзФҙХэЈЁVDDЈ©ЎўөзФҙёәЈЁGNDЈ©әНКэҫЭКдіцЈЁVOUTЈ©ЎЈФЪК№УГКұЧўТвіЙЖ·әмНвҪУКХН·өДФШІЁЖөВК,БнНвФЪТЈҝШұаВлРҫЖ¬КдіцөДІЁРОУлҪУКХН·¶ЛКХөҪөДІЁРОЎЈ 2.3ОТГЗҙЛҙОөДәмНвПЯҪУКХПөНіЦчТӘКЗ¶ФУЪТЈҝШЖчЛщ·ўіцөДәмНвПЯЈ¬¶ФЛэҪшРРҪУКХәНҪвВлҙУ¶ш·ўЛНөҪКэВл№ЬЎўРЎөЖЎў·дГщЖчөИөИИГЖдЧціцПаУҰөД·ҙУҰЎЈ ўЩ·ўЛНЈәНЁіЈөДәмНвТЈҝШНЁіЈОӘБЛМбёЯҝ№ёЙИЕРФДЬәНҪөөНөзФҙПыәДЈ¬әмНвТЈҝШЖчіЈУГФШІЁөД·ҪКҪҙ«ЛН¶юҪшЦЖұаВлЈ¬іЈУГөДФШІЁЖөВКОӘ38kHzЈ¬ХвКЗУЙ·ўЙд¶ЛЛщК№УГөД455kHzҫ§ХсАҙҫц¶ЁөДЎЈФЪ·ўЙд¶ЛТӘ¶Фҫ§ХсҪшРРХыКэ·ЦЖөЈ¬·ЦЖөПөКэТ»°гИЎ12Ј¬ЛщТФ455kHzЎВ12ЎЦ37.9kHzЎЦ38kHzЎЈТІУРТ»Р©ТЈҝШПөНіІЙУГ36kHzЎў40 kHzЎў56 kHzөИЈ¬Т»°гУЙ·ўЙд¶Лҫ§ХсөДХсөҙЖөВКАҙҫц¶ЁЎЈЛщТФЈ¬НЁіЈөДәмНвТЈҝШЖчКЗҪ«ТЈҝШРЕәЕЈЁ¶юҪшЦЖВціеВлЈ©өчЦЖФЪ38KHzөДФШІЁЙПЈ¬ҫӯ»әіе·ЕҙуәуЛНЦБәмНв·ў№в¶юј«№ЬЈ¬ЧӘ»ҜОӘәмНвРЕәЕ·ўЙдіцИҘөДЎЈ ўЪҪУКХЈә¶юҪшЦЖВціеВлөДРОКҪУР¶аЦЦЈ¬ЖдЦРЧоОӘіЈУГөДКЗPWMВлЈЁВціеҝн¶ИөчЦЖВлЈ©әНPPMВлЈЁВціеО»ЦГөчЦЖВлЈ¬Вціеҙ®Ц®јдөДКұјдјдёфАҙКөПЦРЕәЕөчЦЖЈ©ЎЈИз№ыТӘҝӘ·ўәмНвҪУКХЙиұёЈ¬Т»¶ЁТӘЦӘөАәмНвТЈҝШЖчөДұаВл·ҪКҪәНФШІЁЖөВКЈ¬ОТГЗІЕҝЙТФСЎИЎТ»Ме»ҜәмНвҪУКХН·әНЦЖ¶ЁҪвВл·Ҫ°ёЎЈ ·ўЛН¶Л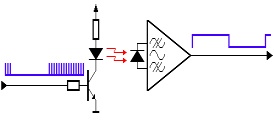 ҪУКХ¶Л ҪУКХ¶Л Нј2.әмНвФӯАнНј ОТГЗНЁ№э¶Ф·ўЛН¶ЛҪшРРұаВлҪшРРәПАнҝШЦЖҙУ¶ш·ўіцКэҫЭИГҪУКХ¶ЛКХөҪТ»¶ЁөДІЁРОНјЛНөҪКэВл№ЬТтОӘҪУКХЦ®әуҪвВліцАҙКЗASC||ВлЛщТФОТГЗРиТӘҪшРРТ»¶ЁөДЧӘ»»ЎЈ 2.4өҘЖ¬»ъЦ»ДЬК¶ұр¶юҪшЦЖКэЧЦЛщТФОТГЗ¶ФУЪКэҫЭөД·ўЛНөДҙ«КдТФј°ҪУКЬРиТӘәЬҪчЙчЎЈҪУКХәН·ўЛНөДКэҫЭВлёсКҪТ»№І·ЦОӘЛДЧйЈәФӯВлЎўФӯВлөД·ҙВлЎўКэҫЭВлЎўКэҫЭ·ҙВлЎЈ Нј3.КұРтНј ФЪЖрКјВлЦ®З°ОТГЗРиТӘПИёшТ»¶ЁөДСУКұЈЁҙуФјЖЯөҪ°ЛәБГлЈ©ЕР¶ПКЗ·сТСҫӯҝӘКјҪУКХөҪХжХэөДРЕәЕИ»әу¶ЁТеТ»ёцСУКұЧУәҜКэИГЛыЧФјУИз№ыҙуФјК®әБГлЧуУТГ»УР·ҙУҰЛөГч·ўЛНіцБЛОКМвЈ¬Из№ыҪУКХөҪХжХэөДРЕәЕН¬КұЦ®З°өДСУКұЧУәҜКэТІГ»УРөҪҙпК®әБГлҫНҝӘКјЦ®әуөДЖрКјВлИГЖдөИҙэҫЕәБГлөДөНөзЖҪИ»әуФЩөИҙэЦ®әуөДЛДөгОеәБГлөДёЯөзЖҪҝӘКјҪУКЬЦ®әуөДЧЦ·ыҙ®ҙжИлОТГЗ¶ЁТеәГөДКэЧйЦРЎЈ¶ФУЪөҘЖ¬»ъөДСУКұОуІоҝЙДЬ»бәЬ¶аОТГЗФЪҙЛҝјВЗөДКЗ¶ФУЪГҝТ»ҙОөДСУКұОТГЗөДПВТ»¶јҪшРРЕР¶ПЦұөҪҫ«И·ҪУКЬөҪОӘЦ№ЎЈ 3.УІјюөзВ·ЙијЖЈә Нј4.өҘЖ¬»ъФӘЖчјю·ЦІј ТтОӘ»щУЪөҘЖ¬»ъөДІЩЧчЛщТФТФ51өҘЖ¬»ъОӘЦчЈ¬ЖдЦРөДУІјюөзВ·Б¬ҪУЎЈ Нј5өҘЖ¬»ъФӯАнНј ұҫҙОЙијЖОТГЗЦчТӘУГөҪөДДЈҝйУРТФПВјёёцЈә Нј6.51өҘЖ¬»ъЧоРЎПөНі ХвКЗОТГЗЛщК№УГөД51өҘЖ¬»ъөДЧоРЎПөНіөДФӯАнНјЈ¬ОТГЗНЁ№эұаВл¶ФЛьөДI/OҝЪҪшРРёЯөНөзЖҪөДҝШЦЖЈ¬ҙУ¶шҝШЦЖЛыөДТ»Р©НвЙиДЈҝйіхКј»ҜНкіЙТ»ПөБРөДІЩЧчК®·Ц·ҪұгЈ¬ө«КЗ51өҘЖ¬»ъөДҙҰАнЛЩ¶ИҪПВэТФј°ҪПЙЩөДI/OҝЪәНЙЩөДДЈҝйҝШЦЖЎўДЪҙжОКМвЦ»ДЬҙҰАнТ»Р©јтөҘТ»Р©өДОКМвЎЈ Нј7.·дГщЖч ·дГщЖч·зО¶УРФҙ·дГщЖчәНОЮФҙ·дГщЖчЈ¬ТтОӘУРФҙәНОЮФҙөДІЩЧчТФј°№ӨЧч·ҪКҪКЗІ»Т»СщөДЈ¬КРГжЙПТФј°өҘЖ¬»ъЙПЕдЦГ·дГщЖчТФОЮФҙ·дГщЖчОӘЦчұШРлУГҪ»БчөзёЯөНөзЖҪөДАҙ»ШЧӘ»»ҝШЦЖЛьөД·ўЙщЈ¬УРФҙ·дГщЖчКЗЦұБчөзФҙјҙҝЙЈ¬ҙуІҝ·Ц¶јКЗУГАҙҫҜұЁәНТфАЦІҘ·ЕЈ¬ЖдЦРОТГЗУГАҙұЁҫҜЎЈ Нј8КэВл№Ь Нј9.ТлВлЖч УГөД51өҘЖ¬»ъұҫЙнЕдЦГОӘЖЯ¶ОКэВл№ЬДЬПФКҫКэЧЦәНј«ёцұрОДЧЦ·ЦұрОӘa,b,c,d,e,f,g,dpХв°Л¶ОdpОӘРЎКэөгО»Ј¬ёшУлёЯөзЖҪФтББН¬Кұ°Л¶ОТІ·ыәП16ҪшЦЖАҙИЎЦөЈ¬ҝШЦЖПФКҫЎЈТлВлЖчФтОӘИэ°ЛПЯТлВлЖчЈ¬УГP2.2Ј¬P2.3Ј¬P2.4АҙҝШЦЖКэВл№ЬөДСЎФсТ»№І°ЛО»КэВл№ЬҙУ000-111АҙҝШЦЖО»СЎЈ¬ФтP0ҝЪУГАҙҝШЦЖ¶ОСЎЎЈ 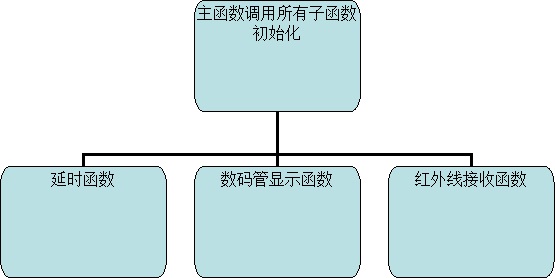
- #include "reg52.h"
- typedef unsigned int u16;
- typedef unsigned char u8;
- sbit beep=P1^5;
- sbit k4=P3^3;
- sbit LSA=P2^2;
- sbit LSB=P2^3;
- sbit LSC=P2^4;
- sbit led1=P2^0;
- sbit IRIN=P3^2;
- //#define led P2
- u8 IrValue[6];
- u8 Time;
- u8 m;
- u8 DisplayData[8];
- u8 code smgduan[17]={
- 0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
- 0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0X76};
- void delay(u16 i)
- {
- while(i--); //10us СУКұәҜКэ
- }
- void DigDisplay()
- {
- u8 i;
- for(i=0;i<3;i++)
- {
- switch(i)
- {
- case(0):
- LSA=0;LSB=0;LSC=0; break;
- case(1): КэВл№Ь
- LSA=1;LSB=0;LSC=0; break; өДСЎФс
- case(2):
- LSA=0;LSB=1;LSC=0; break;
- }
- P0=DisplayData[2-i];//·ўЛНКэҫЭ
- delay(100); //јдёфТ»¶ОКұјдЙЁГи
- P0=0x00;//ПыТю
- }
- }
- /*void DigDisplay()
- {
- P1=0;
- P0=0x01; ККәПУЪАП
- P1=m; КҰөДіМРт
- delay(1);
- } */ //shi yong yu lao shi ban zi
-
-
- void IrInit()
- {
- IT0=1;//ПВҪөСШҙҘ·ў
- EX0=1;//ҙтҝӘЦР¶П0ФКРн
- IT1=1;//МшұдСШіц·ў·ҪКҪЈЁПВҪөСШЈ© әмНвПЯ
- EX1=1;//ҙтҝӘINT1өДЦР¶ПФКРнЎЈ ҙ«Кдҙт
- EA=1; //ҙтҝӘЧЬЦР¶П ҝӘіхКј
- IRIN=1;//іхКј»Ҝ¶ЛҝЪ »ҜәҜКэ
- }
- void main()
- {
- unsigned int temp;
- IrInit();
- //zhongduan();
- while(1)
- {
- DisplayData[0] = smgduan[m]; КэВл№Ь
- DisplayData[1] = smgduan[m]; ЛНО»
- DisplayData[2] = smgduan[m];
- DigDisplay();
- temp++;
- delay(100);
- if(m==1)
- {
- beep=~beep;
- }
- if(temp>10) НкіЙТ»Пө
- { БРөД¶ҜЧч
- if(m==2)
- {
- led1=~led1;
- temp=0;
- }
- }
- }
- }
- void ReadIr() interrupt 0
- {
- u8 j,k;
- u16 err;
- Time=0;
- delay(700); //7ms
- if(IRIN==0) //И·ИПКЗ·сХжөДҪУКХөҪХэИ·өДРЕәЕ
- {
-
- err=1000; //1000*10us=10ms,і¬№эЛөГчҪУКХөҪҙнОуөДРЕәЕ
- while((IRIN==0)&&(err>0)) //өИҙэЗ°Гж9msөДөНөзЖҪ№эИҘ
- {
- delay(1);
- err--;
- }
- if(IRIN==1) //Из№ыХэИ·өИөҪ9msөНөзЖҪ
- {
- err=500;
- while((IRIN==1)&&(err>0)) //өИҙэ4.5msөДЖрКјёЯөзЖҪ№эИҘ
- {
- delay(1);
- err--;
- }
- for(k=0;k<4;k++) //№ІУР4ЧйКэҫЭ
- {
- for(j=0;j<8;j++) //ҪУКХТ»ЧйКэҫЭ
- {
-
- err=60;
- while((IRIN==0)&&(err>0))//өИҙэРЕәЕЗ°ГжөД560usөНөзЖҪ№эИҘ
- {
- delay(1);
- err--;
- }
- err=500;
- while((IRIN==1)&&(err>0)) //јЖЛгёЯөзЖҪөДКұјдіӨ¶ИЎЈ
- {
- delay(10); //0.1ms
- Time++;
- err--;
- if(Time>30)
- {
- return;
- }
- }
- IrValue[k]>>=1; //kұнКҫөЪјёЧйКэҫЭ
- if(Time>=8) //Из№ыёЯөзЖҪіцПЦҙуУЪ565usЈ¬ДЗГҙКЗ1
- {
- IrValue[k]|=0x80;
- }
- Time=0; //УГНкКұјдТӘЦШРВёіЦө
- }
- }
- }
- if(IrValue[2]!=~IrValue[3])
- {
- return;
- }
- if(IrValue[2]==0x16)
- {
- m=0;
- }
- if(IrValue[2]==0x0c)
- {
- m=1;
- }
- if(IrValue[2]==0x18)
- {
- m=2;
- }
- if(IrValue[2]==0x5e)
- {
- m=3;
- }
- if(IrValue[2]==0x08)
- {
- m=4;
- }
- if(IrValue[2]==0x1c)
- {
- m=5;
- }
- if(IrValue[2]==0x5a)
- {
- m=6;
- }
- if(IrValue[2]==0x42)
- {
- m=7;
- }
- if(IrValue[2]==0x52)
- {
- m=8;
- }
- if(IrValue[2]==0x4a)
- {
- m=9;
- }
- if(IrValue[2]==0x40)
- {
- m--;
- }
- if(IrValue[2]==0x43)
- {
- m++;
- }
- if(IrValue[2]==0x46)
- {
-
- }
- }
- }
5.№ҰДЬ·ВХжУлөчКФ
НкХыөДWordёсКҪОДөө51әЪПВФШөШЦ·Јә
| 



 [ёҙЦЖБҙҪУ]
[ёҙЦЖБҙҪУ]

 №ЬАнФұQQ:125739409;јјКхҪ»БчQQИә281945664
№ЬАнФұQQ:125739409;јјКхҪ»БчQQИә281945664










 QQәГУСәНИә
QQәГУСәНИә QQҝХјд
QQҝХјд МЪС¶ОўІ©
МЪС¶ОўІ© МЪС¶ЕуУС
МЪС¶ЕуУС КХІШ
КХІШ МФМы
МФМы ¶Ҙ
¶Ҙ ІИ
ІИ