|
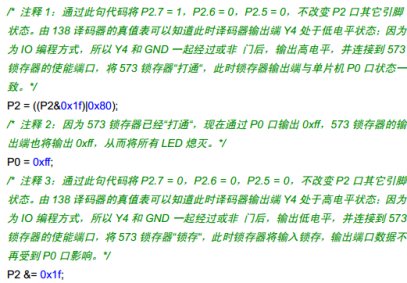
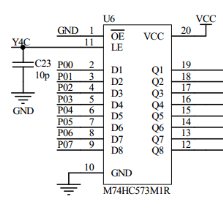
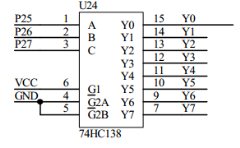
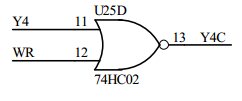
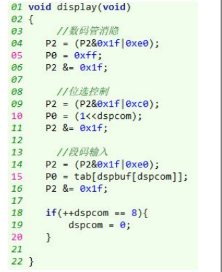
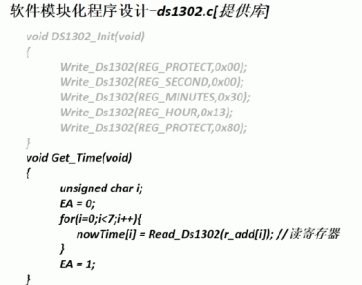
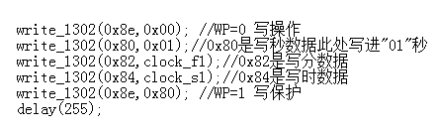
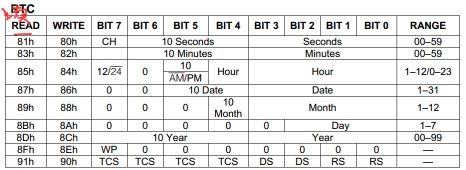
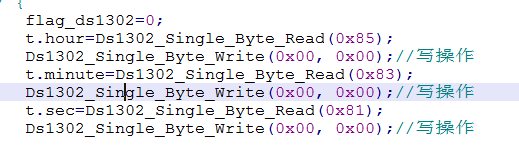
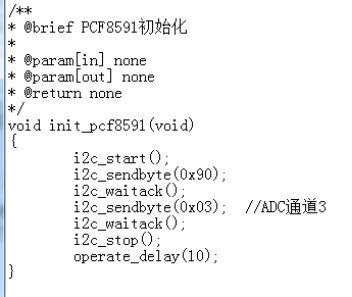
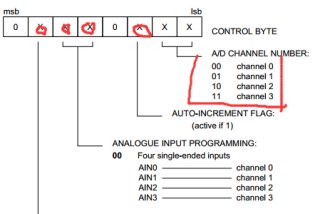
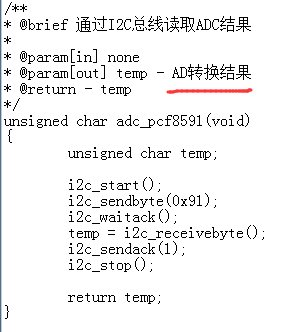
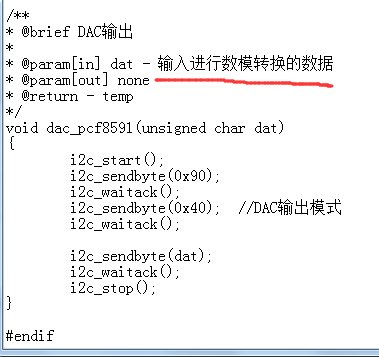
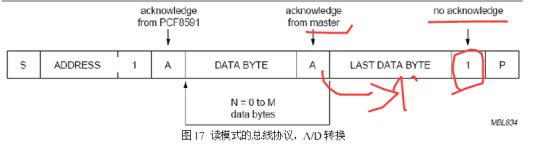
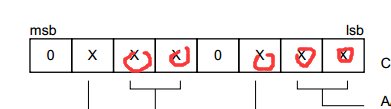
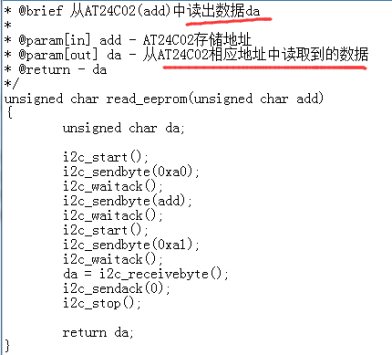
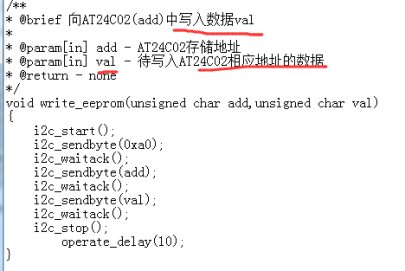
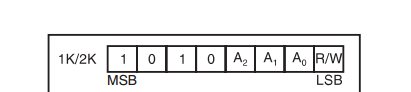
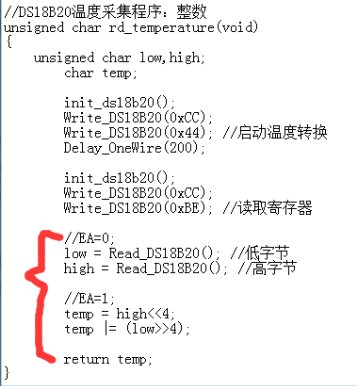
蓝侨杯单片机编程笔记 一、 IO口编程 二、 数码管动态扫描和定时器 三、 矩阵键盘 四、 串口通讯和串口中断 五、 外部中断的使用 六、 实时时钟DS1302的使用 七、 PCF8591与IIC总线的使用 八、 DS18B20温度芯片的使用 九、 超声波传感器的使用 十、 步进电机与直流电机的使用 十一、 扩展:宏定义编程方法(推荐) 十二、 注意事项(常见编程错误) IO编程,该开发板使用了573锁存器,通过P2口的5,6,7位连接3-8译码器,扩展出了8个口,其中4个口分别连接4个573锁存器,这里以LED的锁存器来举例: 原理图573: 分析代码: P2=((P2&0x1f)|0x80); 其中0x1f=0001 1111,P2与0x1f进行与运算,高三位清零,其余位保持原来状态,不改变,即把控制3-8译码器的高三位留出来: 接着再或上0x80;容易发现0x80=1000 0000;或运算,与1或结果为1,与0或结果不变,所以或上0x80只需看P2的高三位,则高三位为100,对应3-8译码器的话,P2^7=1;P2^6=0;P2^5=0; 所以输出Y4=0;Y4再经过与非运算,看下图示: 则输出Y4C=1;即LED对应的锁存器的片选信号被选中,锁存器打通,接下来就可以对P0口进行操作,操作完之后, P2=P2&0x1f;P2高三位直接清零,此时Y4C=0,则把锁存器锁上了。 类似的方法,数码管、蜂鸣器等都是如此操作, 选中锁存器代码: P2=((P2&0x1f)|(这里填对应锁存器的位移号))。 数码管显示分为段选和位选, 数码管定义和显示函数: code unsigned char tab[] = { 0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; unsigned char dspbuf[]={10,10,10,10,10,10,10,10}; unsigned char dspcom=0; void display() { //段选,消隐 P2=((P2&0x1f)|0xe0); P0=0xff; P2=P2&0x1f; //位选 P2=((P2&0x1f)|0xc0); P0=(1<<dspcom); P2=P2&0x1f; //段码输入 P2=((P2&0x1f)|0xe0); P0=tab[dspbuf[dspcom]]; P2=P2&0x1f; if(++dspcom==8) dspcom=0; }注意:这里1左移dspcom位,刚开始dspcom=0,则1左移dspcom位依旧为1,接着dspcom每次自增1,1对应二进制0000 0001,即把1每次向左移,每次都比上一次多移一位,直至8位移完,对应8个数码管。 定时器配置: 这里只需记住定时器的配置,知道怎么使用就可以了。首先有两个定时器,T0和T1,(也有的单片机有T2),定时器有4种工作方式0,1,2,3;其中最常用的是方式1(16位),其次是方式2(8位自动重装,串口通讯中断会用到)。 定时器需要配置:TMOD |=0x01;配置成使用定时器0,工作方式为1;同理使用定时器1工作方式1:TMOD |=0x10;则同时使用两个定时器且工作方式为1,那么可以:TMOD |=0x11; 定时器1配置成工作方式2:TMOD |=0x20; 接着配置(以定时器0举例): TH0=(65535-2000)/256;//配置初值 TL0=(65535-2000)%256; ET0=1; TR0=1;//定时0中断 EA =1;//总中断 定时器1也是同理的,只不过0要改成1. 接着定时中断函数和优先级: 定时器0 void isr_timer_0(void) interrupt 1 //默认中断优先级 1 { TH0 = (65536-2000)/256; TL0 = (65536-2000)%256; //定时器重载 display(); } 定时器1: void isr_timer_1(void) interrupt 3 //默认中断优先级 3 { TH0 = (65536-2000)/256; TL0 = (65536-2000)%256; //定时器重载 display(); } 注意:定时器0优先级为1,定时器1为3,串口中断优先级为4,总共有5个中断源,后面还会介绍外部中断和串口中断。 数码管动态扫描,显示函数放在定时中断函数里面,2ms扫一次是最稳定的!! 矩阵键盘需要死记了!这里不再讲独立键盘。 第二种单片机键盘扫描代码(没有消抖): sfr P4^4=0xC0; //键盘定义 sbit r1=P3^0; //4行 sbit r2=P3^1; sbit r3=P3^2; sbit r4=P3^3; //4列 sbit c1=P4^4; sbit c2=P4^2; sbit c3=P3^5; sbit c4=P3^4; //读取矩阵键盘键值 unsigned char key_scan() { unsigned char key_value; r1=0; r2=r3=r4=1; c1=c2=c3=c4=1; if(!c1) key_value=0; else if(!c2) key_value=1; else if(!c3) key_value=2; else if(!c4) key_value=3; r2=0; r1=r3=r4=1; c1=c2=c3=c4=1; if(!c1) key_value=4; else if(!c2) key_value=5; else if(!c3) key_value=6; else if(!c4) key_value=7; r3=0; r2=r1=r4=1; c1=c2=c3=c4=1; if(!c1) key_value=8; else if(!c2) key_value=9; else if(!c3) key_value=10; else if(!c4) key_value=11; r4=0; r2=r3=r1=1; c1=c2=c3=c4=1; if(!c1) key_value=12; else if(!c2) key_value=13; else if(!c3) key_value=14; else if(!c4) key_value=15; return key_value; } 串口中断配置只需记住几个寄存器就行了, 初始化: SCON =0x50; //串口配置成模式1 TMOD |=0x20;//定时器1,方式2,8位自动重装 TH1=256-(unsigbedchar)(SYSTEMCLOK/BAUDRATE/384+0.5);//定时初值 ES=1; //串口中断打开 TR1=1; //启动定时器1 EA=1; //总中断打开 这里必须使用定时器1,不能用定时器0. 下面是模块化的函数: void Uart_Init() { SCON = 0x50; TMOD |=0x20; TH1=256-(SYSREMCLOCK/BAUDRATE/384+0.5); ES=1; TR1=1; EA=1; } void UartSend(unsigned char*pBuff,int length) { unsigned char c; int i=0; for(i=0;i<length;i++) { c=pBuff[ i]; SBUF=c; while(TI==0); TI=0; } } 接收数据可以这样写: 定义全局变量: unsigned char uart_buf[100];//串口缓冲区 unsigned int uart_Count=0;//串口数据长度 void uart_inte() interrupt 4 { unsigned char c; if(RI) { RI=0; c=SBUF; uart_buf[uart_Count]=c; uart_Count++; } } 如果可以指定的接收,可以这样写 //串口中断服务函数 void isr_uart(void) interrupt 4{ if(RI){ RI = 0; //清除接收标志位 rxbuf[rxcnt] = SBUF; if(rxbuf[rxcnt] == '\n'){ rxcnt = 0; rx_over = 1; ES = 0; //回车为接收结束标志,检测到回车符后,关闭串口中断 } else{ rxcnt++; } } } 当接收完一帧数据时关闭串口中断,设一个标志位,处理完之后再打开。 #include "reg51.h" #include "intrins.h" typedef unsigned char BYTE; typedef unsigned int WORD; BYTE code_tab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff}; char arry[10]="I CAN PLAY"; unsigned char x; #define FOSC 11059200//12000000L //系统频率 #define BAUD 115200 //串口波特率 #define NONE_PARITY 0 //无校验 #define ODD_PARITY 1 //奇校验 #define EVEN_PARITY 2 //偶校验 #define MARK_PARITY 3 //标记校验 #define SPACE_PARITY 4 //空白校验 #define PARITYBIT NONE_PARITY //定义校验位 sfr AUXR = 0x8e; //辅助寄存器 sfr P_SW1 = 0xA2; //外设功能切换寄存器1 #define S1_S0 0x40 //P_SW1.6 #define S1_S1 0x80 //P_SW1.7 sbit P22 = P2^2; bit busy; void SendData(BYTE dat); void SendString(char *s); void main() { ACC = P_SW1; ACC &= ~(S1_S0 | S1_S1); //S1_S0=0 S1_S1=0 P_SW1 = ACC; //(P3.0/RxD, P3.1/TxD) // ACC = P_SW1; // ACC &= ~(S1_S0 | S1_S1); //S1_S0=1 S1_S1=0 // ACC |= S1_S0; //(P3.6/RxD_2, P3.7/TxD_2) // P_SW1 = ACC; // // ACC = P_SW1; // ACC &= ~(S1_S0 | S1_S1); //S1_S0=0 S1_S1=1 // ACC |= S1_S1; //(P1.6/RxD_3, P1.7/TxD_3) // P_SW1 = ACC; //#if (PARITYBIT == NONE_PARITY) SCON = 0x50; //8位可变波特率 //#elif (PARITYBIT == ODD_PARITY) || (PARITYBIT == EVEN_PARITY) || (PARITYBIT == MARK_PARITY) // SCON = 0xda; //9位可变波特率,校验位初始为1 //#elif (PARITYBIT == SPACE_PARITY) // SCON = 0xd2; //9位可变波特率,校验位初始为0 //#endif AUXR = 0x40; //定时器1为1T模式 TMOD = 0x20; //定时器1为模式2(8位自动重载) TL1 = (256 - (FOSC/32/BAUD)); //设置波特率重装值 TH1 = (256 - (FOSC/32/BAUD)); TR1 = 1; //定时器1开始工作 ES = 1; //使能串口中断 EA = 1; while(1) { // SendString(arry); SendString("I CAN PLAY~~\r\n");//上位机显示接收文本模式 // SendData(x); } } /*---------------------------- UART 中断服务程序 -----------------------------*/ void Uart() interrupt 4 using 1 { if (RI)//单片机接收数据,发送数字0~9,可在数码管上显示,发送hex模式 { RI = 0; //清除RI位 // P0 = SBUF; x=SBUF;//将缓存器的数据赋值给x P0=0xff; //消隐 P2|=0xe0; P2&=0x1f; P0=code_tab[x]; //段选 P2|=0xe0; P2&=0x1f; P0=0x01; //位选第一位 P2|=0xc0; P2&=0x3f; } if (TI) { TI = 0; //清除TI位 busy = 0; //清忙标志 } } /*---------------------------- 发送串口数据 ----------------------------*/ void SendData(BYTE dat) { while (busy); //等待前面的数据发送完成 ACC = dat; //获取校验位P (PSW.0) if (P) //根据P来设置校验位 { #if (PARITYBIT == ODD_PARITY) TB8 = 0; //设置校验位为0 #elif (PARITYBIT == EVEN_PARITY) TB8 = 1; //设置校验位为1 #endif } else { #if (PARITYBIT == ODD_PARITY) TB8 = 1; //设置校验位为1 #elif (PARITYBIT == EVEN_PARITY) TB8 = 0; //设置校验位为0 #endif } busy = 1; SBUF = ACC; //写数据到UART数据寄存器 } /*---------------------------- 发送字符串 ----------------------------*/ void SendString(char *s) { while (*s) //检测字符串结束标志 { SendData(*s++); //发送当前字符 } } 记不住可以看手册!! #include "reg51.h" #include "intrins.h" typedef unsigned char BYTE; typedef unsigned int WORD; #define FOSC 11059200L #define BAUD 115200 sfr AUXR=0x8e; //辅助寄存器 sbit P22=P2^2; bit busy; void SendData(BYTE dat); void SendString(char *s); void main() { SCON=0x50; AUXR=0x40; //设置定时器T1为1T,即一个机器周期模式 TMOD=0x20; TL1=(256-(FOSC/32/BAUD)); TH1=(256-(FOSC/32/BAUD)); TR1=1; ES=1; EA=1; SendString("Hello"); while(1); } void Uart() interrupt 4 using 1 { if(RI) { RI=0; P0=SBUF; } if(TI) { TI=0; busy=0; } } void SendData(BYTE dat) { while(busy); busy=1; SBUF=dat; } void SendString(char *s) { while(*s) { SendData(*s++); } } #include <reg52.h> sbit L1=P0^0; int main(){ IT0=1; //IT0=1,下降沿触发外部中断0,IT0=0边沿触发 EX0=1;//使用外部中断0 EA=1; while(1){ } } void Ex_int0() interrupt 0 //外部中断优先级最高 { P2=((P2&0x1f)|0x80); L1=~L1; P2=(P2&0x1f); } 其中,外部中断的引脚控制是P3^2,P3^3,即对应独立按键的S5,S4。 蓝桥杯提供函数,解释为: 里面的命令和写入的数据可以看芯片手册: 左侧的READ、WRITE分别是读写的命令,BIT7-BIT0是要写入的数据,根据需要进行配置。DS1302只需记住这两个函数即可:Write_Ds1302( , )与Read_Ds1302(x),配置看手册。 重点:芯片表说明:第一行:秒->因为秒的范围是0-59,所以6,5,4位表示秒的十位,3,2,1,0表示个位,十位最大是5,所以三位即可。 第二行:跟上面一样; 第三行:7位:1为12小时制,0为24小时制;5位:12小时制时为0表示上午,1表示下午,24小时制时,和4位一起表示小时的十位; 其余的时间一样的表示。 倒数第二行:只看7位:为1时禁止写数据,所以开始写数据时必须置0; 读数时: !!需要加“写操作这一行代码”。 读的话直接按照命令读即可。 DS1302进阶(BCD码转换):解决之前60秒不能进位的问题。 例:写入时间->17:58:50 Ds1302_Single_Byte_Write(0x8e, 0x00);//写操作 Ds1302_Single_Byte_Write(0x85, ((17/10)<<4 | (17%10)));//写时 Ds1302_Single_Byte_Write(0x83, ((58/10)<<4 | (58%10)));//写分 Ds1302_Single_Byte_Write(0x81, ((50/10)<<4 | (50%10)));//写秒 Ds1302_Single_Byte_Write(0x8e, 0x80);//写保护 即转换的公式是:((Value/10)<<4 | (Value%10)),可以写一个settime()函数。 2 ) 读数:读回来的数要进行转换成十进制数 ((ReadValue&0x70)>>4)*10 + (ReadValue&0x0F); 八进制转十进制-> ReadValue=Ds1302_Single_Byte_Read(0x85); hour=((ReadValue&0x70)>>4)*10 + (ReadValue&0x0F); !!(这句一定不要省) Ds1302_Single_Byte_Write(0x00, 0x00);//写操作 ReadValue=Ds1302_Single_Byte_Read(0x83); minute=((ReadValue&0x70)>>4)*10 + (ReadValue&0x0F); Ds1302_Single_Byte_Write(0x00, 0x00);//写操作 ReadValue=Ds1302_Single_Byte_Read(0x81); sec=((ReadValue&0x70)>>4)*10 + (ReadValue&0x0F); Ds1302_Single_Byte_Write(0x00, 0x00);//写操作 显示: dspbuf[0]=hour/10; dspbuf[1]=hour%10; dspbuf[2]=minute/10; dspbuf[3]=minute%10; dspbuf[4]=sec/10; dspbuf[5]=sec%10; 比赛提供了IIC的两个库文件,IIC.h;IIC.c,其中需要注意的函数是: 其中,该函数是初始化的,当使用AD转换的时候需要在main函数开始时调用,该函数内部只需看这句代码即可:i2c_sendbyte(0x03);//ADC通道3,板上有4个模拟输入口,分别为0,1,2,3;设置哪一个模拟输入口就是根据这句代码,0x03表示通道3,这是根据芯片手册配置的,如图: 8位前6位不用管,都为0,最后两位就是配置选择哪一个通道的。 第二个函数: 读取AD转换后的数值,这个函数直接调用就可以了,函数内部如何实现不用管,但是需要注意的是:该函数扫描调用最好是100ms。 第三个函数,上面的都是AD转换,即模拟信号转数字信号,下面这个函数是DA转换,数字信号转换成模拟信号,就是单片机输出数字信号,用万能表去量单片机引出的引脚,量一下电压大小,这个估计比赛不会考,不过预防万一: 该函数和上面两个函数分离开来的,一、二函数是要在一起使用,初始化后之后才能调用,第三个加入头文件,直接调用即可,比较简单!! 上面说法有误,A/D转换的初始化函数和读取转换后的数值都需要自己写。 这里了解一下PCF8591只需根据时序格式发送地址字节和控制字节: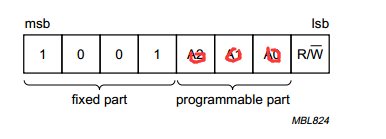 ,这是地址字节,其中A2,A1,A0硬件已经接地,故都为0,最低位表示的是你要从IIC总线上读数还是写数据,1表示读,0表示写,即读数据发的地址是:0x91;写数据发的地址是0x90; ,这是地址字节,其中A2,A1,A0硬件已经接地,故都为0,最低位表示的是你要从IIC总线上读数还是写数据,1表示读,0表示写,即读数据发的地址是:0x91;写数据发的地址是0x90; 控制字节: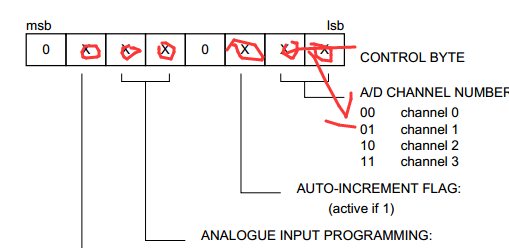 由芯片资料知,控制字节有8位,有两位固定是0,除了第0、1位需要自己设置,其他的我们都设为0,那些位都是一些具体的功能,我们暂时用不着,不用管先,第0、1位是模拟通道选择,PCF8591上提供了4路模拟通道,根据需求进行选择,如选择通道3即发送控制字节:0x03; 地址字节和控制字节都明白了,接下来根据时序要求进行配置,A/D转换需要一个初始化函数:Init_ADpcf8591();和一个获得AD转换后的数值的函数:adc_pcf8591(); 其中初始化函数的作用是发送AD转换的控制字节;adc_pcf8591()发送读取得地址并读回数据,先写指令才能读;格式如下: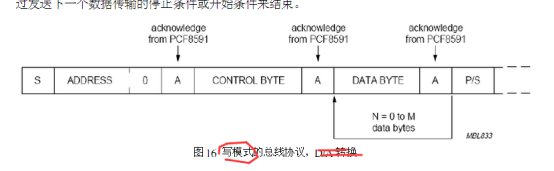 这个是初始化的协议:分别是startIIC、(地址写)发送0x90、等待应答、发送控制字节(AD这里是选择通道的指令,如选择通道3,0x03)0x03、等待应答、(达到目的,没有后续的操作,直接停止总线)StopIIC. 初始化的函数就是如此写; adc_pcf8591的协议: 依次是:startIIc、发送读地址0x91、等待应答、读回AD转换后的数值、读回后发送应答给PCF8591,表示收到,并且不需要再返回应答,要传参数1,如图红圈示,即函数Ack(1);、最后stopIIC总线。 D/A转换(其实挺麻烦,先前太自信了,哈): 所谓D/A转换其实就是把数字信号转换成模拟信号输出,用单片机发数字通过D/A转换成电压输出,检测的方法可以用电压表测量。 配置的方法跟A/D类似,先发地址字节,再发控制字节,然后把数字发出去(AD这里是接收模拟信号,是相反的机制)。 控制字节: 如图示,控制字节的第6位是1的话是模拟输出模式,其余位全为0,发送格式跟AD一样: 代码如一开始图示。 - EEPROM的使用,AT24C02,可以掉电依旧保存上一次操作的数据,下次上电后接着运行。
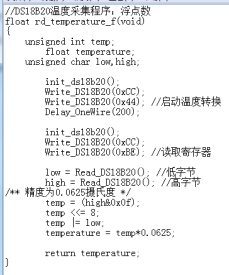
需要注意两个函数,一个是写进EEPROM里面保存,再次上电再从里面读回来: 其中写函数需要指定AT24C02的地址以及需要写入的数据,读函数要想取回写进的数据,需要从相同的地址里面读: 其中AT24C02的存储地址是0x00,可以是其他地址,如0x02,但是读和写的地址必须一致。 写与读的协议与AD或DA相同, 由芯片资料及原理图知EEPROM(AT24C02)的写地址为0xa0;读地址为0xa1;注意:读数的时候读出一个数之后发送一个应答信号,若ACK(0)表示还想继续读下一个字节,若ACK(1);则不想再读数,让EEPROM停止发送。 比赛有提供代码,只需记住这个函数: 读取温度值,整数(其中,提示EA总中断要打开、关闭,也可以不用)。 浮点数的表示。 注意,只有提供函数,没有提供读取温度的函数,即上面的那个,只有下面: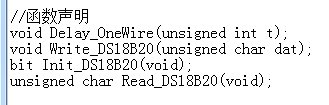 这几个函数。 这几个函数。 编写读取温度的函数需要记住DS13B20的三条指令,0xCC,跳过ROM检测;然后启动温度转换:0x44;转换需要时间,这里精确延时Delay_OneWire(200);然后再次初始化,再次执行跳过,然后读取温度指令:0xBE.;注意读出的温度是低字节先,然后才是高字节,分别用两个变量保存还要通过公式转换成我们需要的整数或浮点数。完整代码如上图示。 #include "reg52.h" //定义51单片机特殊功能寄存器 #include "intrins.h" #include "absacc.h" //12M用这个 /*#define somenop {_nop_();_nop_();_nop_();_nop_();_nop_(); _nop_();_nop_();_nop_();_nop_(); _nop_();}*/ //11.0592用这个 #define somenop {_nop_();_nop_();_nop_();_nop_();_nop_(); _nop_();_nop_();} sbit TX = P1^0; //发射引脚 sbit RX = P1^1; //接收引脚 code unsigned char tab[] = { 0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,\ 0xff}; unsigned char dspbuf[8] = {10,10,10,10,10,10,10,10}; //显示缓冲区 unsigned char dspcom = 0; unsigned int intr = 0; bit s_flag; unsigned int t = 0; void send_wave(void); void display(void); void main(void) { unsigned int distance; TMOD |= 0x11; //配置定时器工作模式 TH0 = (65536-2000)/256; TL0 = (65536-2000)%256; TH1 = 0; TL1 = 0; EA = 1; ET0 = 1; //打开定时器0中断 TR0 = 1; //启动定时器 while(1){ /** 200毫秒更新一次数据 */ if(s_flag) { s_flag = 0; /** 关闭定时器0中断:计算超声波发送到返回的时间 send_wave(); //发送方波信号 TR1 = 1; //启动计时 while((RX == 1) && (TF1 == 0)); //等待收到脉冲 TR1 = 0; //关闭计时 //发生溢出 if(TF1 == 1) { TF1 = 0; distance = 9999; //无返回 } else { /** 计算时间 */ t = TH1; t <<= 8; t |= TL1; distance = (unsigned int)(t*0.017); //计算距离 } TH1 = 0; TL1 = 0; } /** 数据处理 */ dspbuf[5] = distance/100; dspbuf[6] = distance%100/10; dspbuf[7] = distance%10; } } //定时器0中断服务函数 void isr_timer_0(void) interrupt 1 //默认中断优先级 1 { TH0 = (65536-2000)/256; TL0 = (65536-2000)%256; //定时器重载 display(); //2ms执行一次 if(++intr == 200){ s_flag = 1; intr = 0; } } //显示函数 void display(void){ XBYTE[0xE000] = 0xff; //去除鬼影 XBYTE[0xC000] = (1<<dspcom); XBYTE[0xE000] = tab[dspbuf[dspcom]]; if(++dspcom == 8){ dspcom = 0; } } //TX引脚发送40KHz方波信号驱动超声波发送探头 void send_wave(void) { unsigned char i = 8; //发送8个脉冲 do { TX = 1; somenop; TX = 0; somenop; } while(i--); } 必要时还可以加个看门狗: WDT_CONTR=0x34; 参考代码如下: #include <reg52.h> sbit A1=P1^4; //定义步进电机连接端口 sbit B1=P1^3; sbit C1=P1^2; sbit D1=P1^1; void qudong1(); #define Dy_A1 {A1=1;B1=0;C1=0;D1=0;}//A相通电,其他相断电 #define Dy_B1 {A1=0;B1=1;C1=0;D1=0;}//B相通电,其他相断电 #define Dy_C1 {A1=0;B1=0;C1=1;D1=0;}//C相通电,其他相断电 #define Dy_D1 {A1=0;B1=0;C1=0;D1=1;}//D相通电,其他相断电 //采用1相励磁 #define Dy_OFF {A1=0;B1=0;C1=0;D1=0;}//全部断电 unsigned char Speed,Speed1; /*------------------------------------------------ uS延时函数,含有输入参数 unsigned char t,无返回值 unsigned char 是定义无符号字符变量,其值的范围是 0~255 这里使用晶振12M,精确延时请使用汇编,大致延时 长度如下 T=tx2+5 uS ------------------------------------------------*/ void DelayUs2x(unsigned char t) { while(--t); } /*------------------------------------------------ mS延时函数,含有输入参数 unsigned char t,无返回值 unsigned char 是定义无符号字符变量,其值的范围是 0~255 ------------------------------------------------*/ void DelayMs(unsigned char t) { while(t--) { //大致延时1mS DelayUs2x(245); DelayUs2x(245); } } /*------------------------------------------------ 主函数 ------------------------------------------------*/ main() { Dy_OFF; for(;;) { qudong1(); } } void qudong1() { unsigned int i=470;//旋转一周时间 Speed=5; while(i--) //正向 { Dy_A1 //遇到Coil_A1 用{A1=1;B1=0;C1=0;D1=0;}代替 DelayMs(Speed); //改变这个参数可以调整电机转速 , //数字越小,转速越大,力矩越小 Dy_B1 //顺序从A1--D1相通电如果为正转,那么顺序从D1--A1相通电则为反转 DelayMs(Speed); Dy_C1 DelayMs(Speed); Dy_D1 DelayMs(Speed); } Dy_OFF i=512; while(i--)//反向 { Dy_D1 //遇到Coil_A1 用{A1=1;B1=0;C1=0;D1=0;}代替 DelayMs(Speed); //改变这个参数可以调整电机转速 , //数字越小,转速越大,力矩越小 Dy_C1 DelayMs(Speed); Dy_B1 DelayMs(Speed); Dy_A1 DelayMs(Speed); } } 直流电机: #include<reg52.h> #define uint unsigned int void drive(); void delay(uint); sbit dj1=P1^0; //电机,1引脚 uint set; //set为电机转角标志位 unsigned char angle,angle1; //angle为电机PWM变化打角 void Time0_Init() //中断初始化 { TMOD=0X01; IE=0X82; TH0=(65536-58)/256; TL0=(65536-58)%256; TR0=1; } void main() //主函数 { set=0; angle=62; // 改变angle的值可以改变电机的占空比 Time0_Init(); for(;;) { } } void T0_time()interrupt 1 { TH0=(65536-58)/256; TL0=(65536-58)%256; if(set<angle) dj1=1; else dj1=0; set++; if(set>165) set=0; //电机占空比 } 常用的可以宏定义,省时,下面以数码管为例: #define rst573 P2&=0x1f #define Y6C P2= ((P2&0x1f)|0xc0) #define Y7C P2= ((P2&0x1f)|0xe0) code unsigned char tab[] = { 0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; unsigned char dspbuf[8] = {10,10,10,10,10,10,10,10}; //显示缓冲区 unsigned char dspcom; unsigned char flag; void display() { Y7C; P0=0xff; rst573; Y6C; P0=1<<dspcom; rst573; Y7C; P0=tab[dspbuf[dspcom]]; rst573; if(++dspcom==8) dspcom=0; } - 设置标志位flag,常在定时的时候使用,一般我们常用的数据类型是unsigned char类型,有时候我们这样判断if(flag==500){flag=0; … };这是十分明显的错误,unsigned char是8位,范围是0-255,500已经超出其最大值的范围了,但是编译的时候是不会报错的,我们可以设成unsigned int 类型,16位,范围很大。
- 模拟题中led闪烁的频率随着温度值value与设定的范围值比较而改变,这里困扰了我很久,终于在前人的代码中找到解决方法了,这样:设置的标志位flag不要直接在while循环里直接如:if(flag==100){flag=0;…}不要这样写。应该在定时中断新定义一个变量,如为标志位flag_100ms(假设进入一次定时中断2ms):
void time0() interrupt 1 { unsigned int i; if(++i==50) { i=0; flag_100ms=1; } } 然后在需要用到的位置判断标志位是否为1即可。 注意:也可以设静态变量,建议用: void time0() interrupt 1 { TH0=(65535-2000)/256; TL0=(65535-2000)%256; static unsigned int i=0; static unsigned int j=0; if(++i==100) { i=0; flag_200ms=1; } if(++j==200) { j=0; flag_400ms=1; } } 3、注意DS18b20温度传感器,因为使用的单片机芯片不一样,晶振频率不一样,而DS18b20对时序的要求又很严格,所以这里记住两种单片机的延时程序://单总线延时函数 #ifndef STC12 void Delay_OneWire(unsigned int t) //STC89C52RC { while(t--); } #else void Delay_OneWire(unsigned int t) //STC12C5260S2 { unsigned char i; while(t--){ for(i=0;i<12;i++); } } #endif 4、使用串口通讯传一个数组给PC机,如果是文本模式显示字符,需要将字符的ASII码转换成文本字符,还需在数组末尾加一个结束符‘\0’: Val[0]='{'; Val[1]=(hour/10)+48; 。 。 。 Val[19]='H'; Val[20]='}'; Val[21]='\0'; 5、串口通讯波特率设置及初始化函数: sfr AUXR=0x8e; //宏定义区 #define BAUD 1200//波特率;需要设置哪个波特率只需在这里更改即可 #define FOSC 11059200L //晶振频率 void InitSerial() { SCON=0x50; TMOD |=0x00;//使用16位自动重载方式,选择T1 AUXR=0x40;//设置定时器为一个周期,即1T TL1=(65536-(FOSC/4/BAUD)); TH1=(65536-(FOSC/4/BAUD))>>8; TR1=1; ES=1; } 6、串口中断函数及发送、结束函数: void Uart() interrupt 4 using 1 { if(RI){ RI=0; value=SBUF; } if(TI){ TI=0; busy=0; } } void SendData(unsigned char dat) { while(busy); busy=1; SBUF=dat; } void SendString(unsigned char *s) { while(*s){ SendData(*s++); } } 7、简单的电路设计知识点: SOURCE CURRENT 电流源
SOURCE VOLTAGE 电压源 定值无极性电容;CAP
定值有极性电容;CAP
继电器:RELAY. LIB 运放:OPAMP
BATTERY 直流电源
DIODE 二极管
DIODE SCHOTTKY 稳压二极管
NPN NPN三极管
NAND 与非门
NOR 或非门
NOT 非门 4013 D 触发器
4027 JK 触发器
 8、LED闪烁控制程序参考: static unsigned char LED=0xfe; XBYTE[0x8000]=LED=LED^0x01;(和0x01进行异或运算,L1闪烁!!) 9、数码管的码值(牢记): tab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff,0xbf};
完整的Word格式文档51黑下载地址:
 蓝侨杯单片机编程笔记新.docx
(976.4 KB, 下载次数: 9)
蓝侨杯单片机编程笔记新.docx
(976.4 KB, 下载次数: 9)
|