超声波跟随小车
【专科组】
一、系统方案本系统主要由超声波模块、电机驱动模块、系统控制模块、电源模块组成,下面分别论证这几个模块的选择。
1、超声波模块的论证与选择方案一:HC-SR04
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。
方案二:US-100
US-100 超声波测距模块可实现 0~4.5m 的非接触测距功能,拥有 2.4~5.5V 的宽电压输入范围,静态功耗低于 2mA,自带温度传感器对测距结果进行校正,同时具有 GPIO,串口等多种通信方式。
HC-SR04和US-100的测距和精确度都差不多,US-100的价格比HC-SR04更高,选择方案一更经济实惠。
2、电机的论证与选择方案一:采用直流电机,优点在于硬件电路设计简单。当外加额定直流电压时,转速几乎相等,调速性能较好,且性价比高。对于小车的行驶,能够很好的控制。
方案二:采用进步电机,进步电机可以实现精确的转角输出,只要施加合适的脉冲序列,电机可以按照人们预定的速度或方向进行连续的转动,便于控速,但是软件程序的编写较直流电机稍显复杂。
两相比较直流电机更符合本小车的要求,故选择方案一。
3、电机驱动模块的论证与选择方案一:双L298驱动模块
L298采用SMT工艺稳定性高,采用高质量铝电解电容,使电路稳定工作。可以直接驱动两路3-16V直流电机,并提供了5V输出接口(输入最低只要6V),可以给5V单片机电路系统供电(低纹波系数),支持3.3V MCU ARM控制,可以方便的控制直流电机速度和方向,也可以控制2相步进电机,5线4相步进电机。
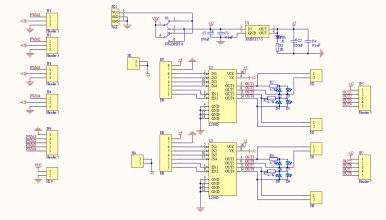
双L298驱动原理图
方案二:智能车电机驱动模块
BTS7960是应用于电机驱动的大电流半桥高集成芯片,它带有一个P沟道的高边MOSFET、一个N沟道的低边MOSFET和一个驱动IC。P沟道高边开关省去了电荷泵的需求, 因而减小了EMI。集成的驱动IC具有逻辑电平输入、电流诊断、斜率调节、死区时间产生和过温、过压、欠压、过流及短路保护的功能。
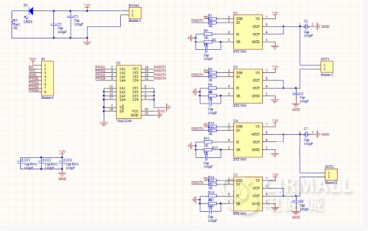
BTS7960驱动原理图
L298驱动能力有限,芯片内阻很大,负载稍大发热严重,利用率非常低,但用于驱动智能小车的电机足够了,价格合适,经济实惠。BTS7960驱动能力大(相对l298而言),但此芯片英飞凌已经停产,市面是大多是翻新货,品质良莠不齐,且价格高,综上所述,选择方案一
4、控制系统的论证与选择采用单片机作为整个系统的核心,用其控制行进中的小车,以实现其既定的性能指标。充分分析我们的系统,其关键在于实现小车的自动控制,而在这一点上,单片机就显现出来它的优势——控制简单、方便、快捷。这样一来,单片机就可以充分发挥其资源丰富、有较为强大的控制功能及可位寻址操作功能、价格低廉等优点。因此,这种方案是一种较为理想的方案。
单片机的选择
方案一:Stm32
方案二:51
STM32优点:处理速度快,片内程序存储空间大,性价比高,功耗低,资源丰富。
缺点:程序编写要求较高。
51优点:操作方便,配置简单,应用普遍。
缺点:I/O口较少,设计外部电路较为复杂。
基于我们现阶段的学习我们最终选择了51单片机中的STC系列单片机
STC单片机优点:
1、抗干扰能力强;
2、保密性能强悍,很难被破解;
3、单片机时钟有防外部电磁辐射功能;
STC单片机缺点:
1、功耗较高,5V供电;
2、8位,运行速度慢;
3、无硬件乘法器,乘除法运算都为4周期指令;
4、单片机内集成资源少。
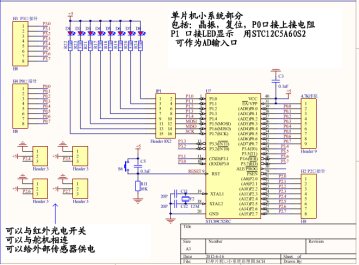
Stc最小系统原理图
5、电源选用Li-ion 18650 7.4v。
二、系统理论分析与计算1、测距的分析与计算 通过超声波发射装置发出超声波,根据接收器接到超声波时的 时间差就可以知道距离了。 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。(超声波在空气中的传播速度为340m/s,根据 计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2)
2、跟随的分析与计算 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。(超声波在空气中的传播速度为340m/s,根据 计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2)当小车与障碍物距离小于20cm时,小车后退;大于20cm小于40cm时,小车停止;大于40cm时,小车前进。从而达到小车跟随障碍物的目的。
三、电路与程序设计1、电路的设计(1)系统总体框图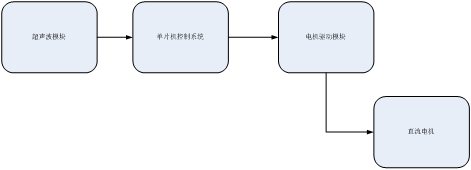
2、程序的设计(1)程序功能描述与设计思路1、程序功能描述
根据题目要求软件部分主要实现超声波测距与超声波跟随。
1)超声波测距:超声波模块发射接收信号的时间与超声波在空气中的传播速度算出距离s=340t/2。
2)超声波跟随:通过小车与障碍物的距离控制小车的运行。
2、程序设计思路
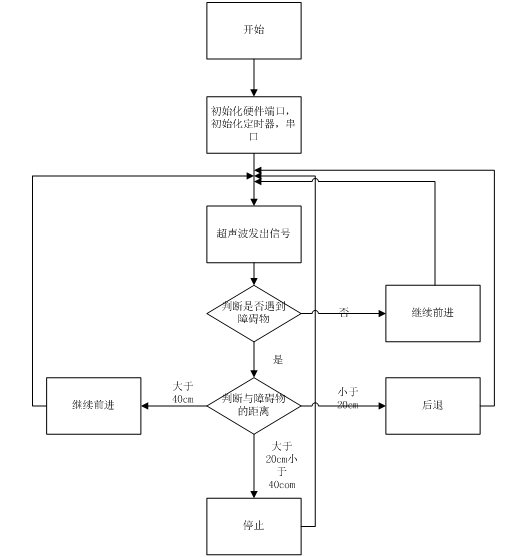
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。(超声波在空气中的传播速度为340m/s,根据 计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2)当小车与障碍物距离小于20cm时,小车后退;大于20cm小于40cm时,小车停止;大于40cm时,小车前进。
(2)程序流程图1、主程序流程图
四、测试方案与测试结果1、测试方案将小车放在空地上,小车的前方放置一个障碍物,开启小车,将障碍物放在离小车20cm的地方,移动障碍物,察看小车的运行模式。
2、测试结果及分析(1)测试结果(数据)测距结果如下表所示: (单位/cm)
小车可以跟着障碍物运行
(2)测试分析与结论通过测试与检测实现了超声波测距,串口显示,超声波跟随的功能。
综上所述小车达到预计要求
五、结论与心得本次制作超声波跟随小车,实现了超声波测距,串口显示,超声波跟随的功能。满足了制作要求。
通过这次制作,我们小组都收获颇多。刚开始的时候遇到许多困难,但经过我们的努力,克服了重重困难,最终制作成功。这次制作超声波跟随小车不仅用到了以前学到的知识,还让我们学到了很多之前没有接触过的内容,让我们受益匪浅,同时也锻炼了我们的动手能力,让我们对单片机有了更进一步的认识。当然由于水平有限,小车存在些许不足。在制作过程中,由于有些模块的损坏,程序的不精确,给我们的制作过程造成了很大的困扰,我们通过与其它小组的交流探讨,查阅资料,更换模块,逐步修改,并进行了多次实践,终于制作成功。通过此次制作,我们不仅在理论知识方面丰富了自己,同时在实践中也拓展了自己的思维方式。对于今后的课题制作是大有裨益。










 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

