��ϵͳ���2
1.1������� 2
1.2�������� 2
1.3��չ���� 2
2ϵͳ������֤2
2.1����ģ�� 2
2.2��ʾģ�� 3
3 DS18B20�����۷��������3
4��·��������6
4.1ϵͳ�����ͼ 6
4.2�����· 6
4.3��������
�ܽ�
��¼1
��¼2
��ϵͳ���
1.1����������һ�����¶Ȳ���ϵͳ�����Զ�ʵ��ʵ���¶ȵIJ�������ʾ��
1.2����������1�����·�Χ-30�桫+120�档
��2����������ڡ�0.5��֮�ڡ�
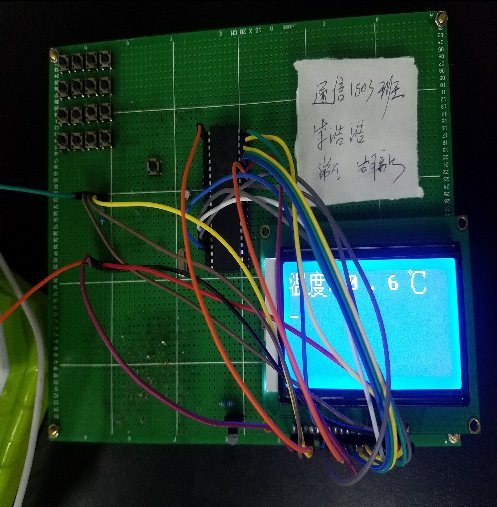
��3����������ʾ�������¶ȡ�
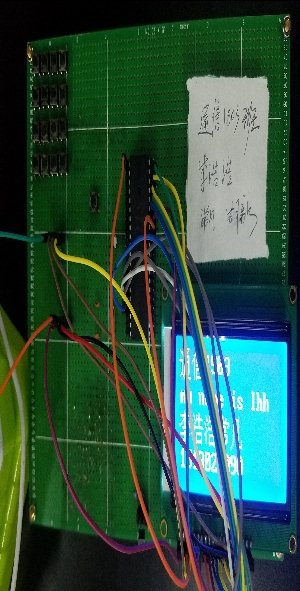
��4����������ʾ�������¶ȵı任����ͼ��
1.3��չ������1�������¿ع��ܣ������������¿ص������ޡ�
��2�������¿ر������ܡ�
2ϵͳ������֤ ��ϵͳ��Ҫ������ģ�顢��ʾģ�顢����ģ�顢������ģ�顢LEDģ�顢������ģ����ɣ�����ֱ���֤�⼸��ģ���ѡ��
2.1����ģ��������AT89C52��Ƭ����һ�ָ�����8λ��Ƭ�ͼ�������ں˱������зḻ��ָ����㹻ʵ�ֱ�����Ʒ��ȫ���������ܺͲ�����չ���ܣ����Atmega16���Ƕ�AT89C52��Ϊ��Ϥ����оƬ�۸�ϵͣ��Լ۱ȸߡ�
2.2��ʾģ������������LCD12864��ʾ��LCD12864��Ļ��ʾϸ��ֱ�ۣ��ҿ�����ʾ���ģ����������
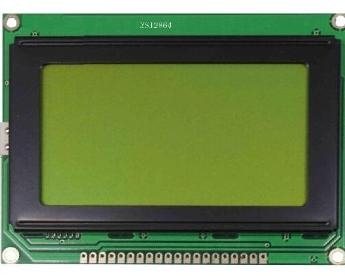
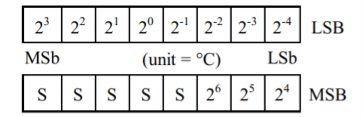
3 DS18B20�����۷��������DS18B20 ͨ����̣�����ʵ����� 12 λ���¶ȴ洢ֵ���ڼĴ����У��Բ���ĸ�ʽ�洢����ͼ1��ʾ��
ͼ1 DS18B20 �¶����ݸ�ʽ
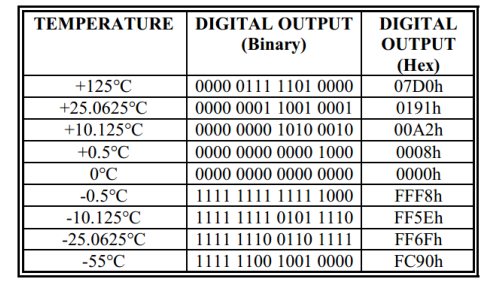
�Ĵ���һ�� 2 ���ֽڣ�LSB �ǵ��ֽڣ�MSB �Ǹ��ֽڣ����� MSb ���ֽڵĸ�λ��LSb ���ֽڵĵ�λ����ҿ��Կ����������������֣�ÿһλ�������¶ȵĺ��壬����ʾ�����ˡ����� S��ʾ���Ƿ���λ���� 11 λ���� 2 ���ݣ�������ʾ���յ��¶ȡ�DS18B20 ���¶Ȳ�����Χ�Ǵ�-55 �ȵ�+125 �ȣ����¶����ݵı�����ʽ���������¶ȣ��Ĵ�����ÿ��������ͬ���ߵĿ̶�һ���ֲ�����ͼ 2��ʾ��
ͼ2 DS18B20 �¶�ֵ
�������������λ�仯 1�������¶ȱ仯 0.0625 �ȵ�ӳ���ϵ���� 0 �ȵ�ʱ���Ǿ���0x0000�����¶� 125 �ȵ�ʱ��Ӧʮ�������� 0x07D0�����¶������� 55 �ȵ�ʱ��Ӧ�������� 0xFC90��������˵���������� 0x0001 ��ʱ�����¶Ⱦ��� 0.0625 ���ˡ�
DS18B20 ����:
DALLAS ���µ��������¶ȴ�����DS18B20��һ�����͵ġ�һ�����������������С���������ڶ��ֳ��ϡ������õ�ѹ�����������á�DALLAS �뵼�幫˾�����ֻ��¶ȴ�����DS18B20�������ϵ�һƬ֧�֡�һ�����ߡ��ӿڵ��¶ȴ��������¶Ȳ�����ΧΪ-55��+125 ���϶ȣ��ɱ��Ϊ9λ��12 λת�����ȣ����·ֱ��ʿɴ�0.0625���϶ȣ��ֱ����趨�����Լ��û��趨�ı����¶ȴ洢��EEPROM �У��������Ȼ���档�����¶��÷�����չ��16λ��������ʽ����������乤����Դ�ȿ�����Զ�����룬Ҳ���Բ��ü�����Դ��ʽ���������DS18B20���Բ�����3 ����2 �����ϣ�CPUֻ��һ���˿��߾��������DS18B20 ͨ�ţ�ռ���������Ķ˿ڽ��٣��ɽ�ʡ���������ߺ�����·��������������һ������ϵͳ��������·����һ��ͨ���ߣ����ԹҺܶ������������¶ȼƣ�ʮ�ַ��㡣
DS18B20 �������ص����£�
����صĵ��߽ӿڷ�ʽ��DS18B20��������������ʱ����Ҫһ��������ʵ����������DS18B20��˫��ͨѶ
��DS18B20֧�ֶ���������ܣ����DS18B20���Բ�����Ψһ�������ϣ�ʵ������������
��DS18B20��ʹ���в���Ҫ�κ���ΧԪ����ȫ������Ԫ����ת����·����������һֻ�����ܵļ��ɵ�·��
����Ӧ��ѹ��Χ��������ѹ��Χ��3.0��5.5V���ڼ�����Դ��ʽ�¿��������߹���
����·�Χ��55�桫��125�棬����Ϊ��0.5��
�����������
��������ֱ����������źţ��ԡ�һ�����ߡ����д���CPU��ͬʱ�ɴ���CRCУ��λ�����м�ǿ�Ŀ����ž�������
��ѹ���ԣ���Դ���Խӷ�ʱ���¶ȼƲ������ȶ��ջ٣���������������
�����ص�ʹDS18B20�dz��������㡢Զ�����¶ȼ��ϵͳ��
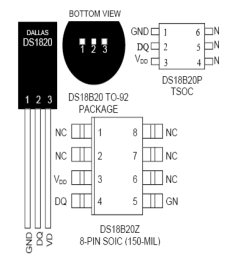
DS18B20�ڲ��ṹ��Ҫ���IJ�����ɣ�64λ���ROM���¶ȴ��������ǻӷ����¶ȱ���������TH��TL�����üĴ�����DS18B20�Ĺܽ����С����ַ�װ��ʽ��ͼ 4.2 ��ʾ��DQ Ϊ��������/������š���©�����߽ӿ����š����������ڼ�����Դ�£�Ҳ�����������ṩ��Դ��GNDΪ���źţ�VDDΪ��ѡ���VDD���š��������ڼ�����Դʱ�������ű���ӵء�
�ⲿ��װ��ʽ ��������·ͼ
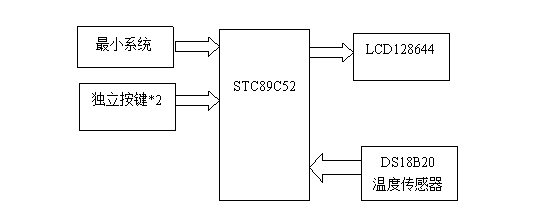
4��·��������4.1ϵͳ�����ͼϵͳ�����ͼ��ͼ3��ʾ
ͼ3 ϵͳ�����ͼ
4.2�����·�����·ͼ����¼2��
4.3��������4.3.1������������1���ܹ�����-30�桫+120����¶ȡ�
��2������S1�������¶ȱ������ޣ�����S2�ܼ����¶ȱ������ޡ�
4.3.2�������ʵ��������¼1��
�ܽ���ϵͳ�Ե�Ƭ��STC89C52оƬΪ���IJ���������LCD12864������������DS18B20�����C�����㷨ʵ���˼��������¶ȼ���ƣ���ɴ˴������Ŀ�е�ȫ���������ܺͲ�����չ���ܡ���ϵͳ��ƹ����У�����Ӳ����·����ַ���������̷��������ص㣬������ϵͳ���Ҫ��
�ڱ�����ƵĹ����У�����������ͻ���¼������ѣ����������һ��ֹ����ǰ����ͨ����ϸ�����͵���������һ����һ�������⡣������������������̵���ᵽ�ŶӾ������Ҫ�ԣ���������Լ����������������ڿγ���Ƶ����������У����������������벻�������ѣ����Լ���Ƶ�·��������������ȵȡ�������ˣ��ܶ��δ������������������������ң������ڵ��ԵĹ����У�ʱ���������⣬��ÿ�ξ�����ϸ�������ң����ڿ��Խ���Щ��������Ե��ҵ������к����ĸ�����ȷ��������ʵ�ֶ�Ӧ�Ĺ��ܣ����Լ���������Ĺ����У�����ѧ���˺ܶ��µ�֪ʶ��





 ����ԱQQ:125739409;��������QQȺ281945664
����ԱQQ:125739409;��������QQȺ281945664








 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ�ռ�
QQ�ռ� ��Ѷ��
��Ѷ�� ��Ѷ����
��Ѷ���� �ղ�
�ղ� ����
���� ��
�� ��
��