大学生电子设计竞赛
循迹小车(I题)
1 系统方案
1.1 整体系统方案的选择
方案一,基于K66嵌入式系统,采用恩智浦智能车车模,配合大功率电机与BTN7971B驱动芯片进行后轮驱动,前轮通过舵机控制方向,通过在车后安装512线mini编码器进行PID精确调速,通过OV7725数字二值化摄像头读取赛道黑线信息并将数据发送给单片机处理,进而控制电机与舵机的运行。
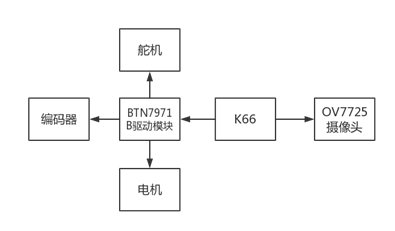
图1 方案一设计框图
方案二,基于52单片机系统,采用普通四轮车模,配合L298N驱动芯片进行后轮驱动,前轮安装舵机进行转向,使用HC-SR04超声波模块进行测距以实现避障,通过在车前与车后安装TCRT5000红外传感器读取赛道黑线信息并将数据发送给单片机处理,进而控制电机的转速来控制小车运行速度与方向。
方案三,改变方案二的驱动模式,由后轮驱动改为四轮驱动,取消舵机。
经测试,恩智浦智能车车模舵机转向角度不够,不足以通过S弯,且摄像头作传感器只能进行前进,后退时仍需要红外循迹模块,将花费过多不必要的时间。而方案二虽然实现了要求的全部功能,但是舵机在转弯时速度较慢,与其他组相比不具有优势,因此选择了速度较快的方案三。
1.2 整体系统方案的论证
用单片机作为循迹小车的处理器,配合使用一系列硬件部分,实现小车的各功能。该方案硬件可分为如下部分:
- 输入设备(红外循迹模块,超声波模块)
- 电机及其驱动部分
其中,循迹模块进行黑线的读取,当反射的光照射到接收管时会在接收管上产生相应的电位变化,超声波模块通过高低电平读定时器的值进行测距,以上信号被单片机识别后。配合电机驱动及直流电机,即可实现循迹与避障功能,。
2 系统理论分析

2.1 单片机部分
 STC89C52RC是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有 8K字节系统可编程Flash存储器。STC89C52使用经典的MCS-51内核,但做了很多的改进使得芯片具有传统51单片机不具备的功能。在单芯片上,拥有灵巧的8位CPU 和系统可编程Flash,在循迹小车的实现中,起到至关重要的作用。
STC89C52RC是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有 8K字节系统可编程Flash存储器。STC89C52使用经典的MCS-51内核,但做了很多的改进使得芯片具有传统51单片机不具备的功能。在单芯片上,拥有灵巧的8位CPU 和系统可编程Flash,在循迹小车的实现中,起到至关重要的作用。
2.2 硬件部分
2.1.1 HC-SR4超声波模块
 超声波模块主要有TRIG控制端与ECHO接收端两个端口,控制口发一个10us以上的高电平,就可以在接收口等待高电平输出。一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离,如此不断的测周期,就可以算出移动测量的值。
超声波模块主要有TRIG控制端与ECHO接收端两个端口,控制口发一个10us以上的高电平,就可以在接收口等待高电平输出。一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离,如此不断的测周期,就可以算出移动测量的值。
2.1.2 TCRT5000红外发射传感器

 红外发射管发射光线到路面,红外光遇到白底则被反射,接收管接收到反射光,经施密特触发器整形后输出低电平;当红外光遇到黑线时则被吸收,接收管没有接收到反射光,经施密特触发器整形后输出高电平,同时将信号输入单片机进行处理。
红外发射管发射光线到路面,红外光遇到白底则被反射,接收管接收到反射光,经施密特触发器整形后输出低电平;当红外光遇到黑线时则被吸收,接收管没有接收到反射光,经施密特触发器整形后输出高电平,同时将信号输入单片机进行处理。
3 电路与程序设计
3.1 电路的设计
3.1.1系统总体框图
图5 系统总体框图
3.1.2 红外循迹传感器子系统框图与电路原理图
3.2程序的设计
3.2.1程序功能描述与设计思路
小车通过寻迹模块产生外部中断,来识别黑色长标志线。每个标志线之后对应不同的状态,依次为直行模式,单线模式,双线模式,单线模式和倒库模式。直行模式就是两边电机相同转向直行;单线模式是用前部里侧的两个寻迹模块检测黑线控制两侧电机转向;双线模式是用前面的外部的外侧两个寻迹模块来检测黑线,控制电机转向;倒库模式先后左转后寻黑线后退,到达库底停车10s,再由外部中断移库,移库后用里面两个寻迹和右边寻迹模块检测黑虚线到达超声波前,实现避障到达终点。
3.2.2 程序流程图
图8 程序流程图
4 测试方案与测试结果
将小车放置于比赛场地上进行测试。
4.2 测试条件与仪器
中心提供的场地。
4.3 测试结果及分析
4.3.1 测试结果(数据)
小车可以沿铺设的黑线场地进行“S”型转弯,虚线跑道循迹行驶,并可进行快速倒车入库与移库,并避开最后的障碍物。
4.3.2 测试分析与结论
小车在绝大多数情况下均很好的实现了题目的全部要求,只在极少数情况下会驶出虚线跑道,说明我们的程序在虚线的识别上仍然存在一些小问题。
5 心得体会
这次比赛是个人努力与团队协作的共同产物,相互不能割舍。通过这次比赛,加强了我们动手、思考和解决问题的能力。在整个设计过程中,我们通过这个方案包括设计了一套电路原理和Proteus仿真应用及和芯片上的选择。在设计过程中,经常会遇到这样那样的情况,就是心里想这样的接法可以行得通,但实际接上电路,总是实现不了,因此耗费在这上面的时间用去很多。我觉得设计同时也是对课本知识的灵活运用,因为课本上的知识点繁杂,平时的基础学习并不能很好的掌握其中的理解各个元件的功能,而且考试内容有限。因此在这次课程设计过程中,我们掌握了理论与实践相互结合,印象更加深刻。在平时看课本时,有时问题老是弄不懂,理解不上去,缺乏动手能力,在做设计过程中,把握其中的关键知识点,充分研究,对于知识的领悟更加深刻。在动手处理单片机时,更急发现到实践的重要性,哪怕一个小小细微的功能元件的错误都会失败,细心与耐心、恒心才能做的成功,而且在布局和构造格式中,线的布局上既要美观、实用和简单,其中兼顾到方方面面去考虑是很需要的,否则会影响整个设计的实际性的应用。
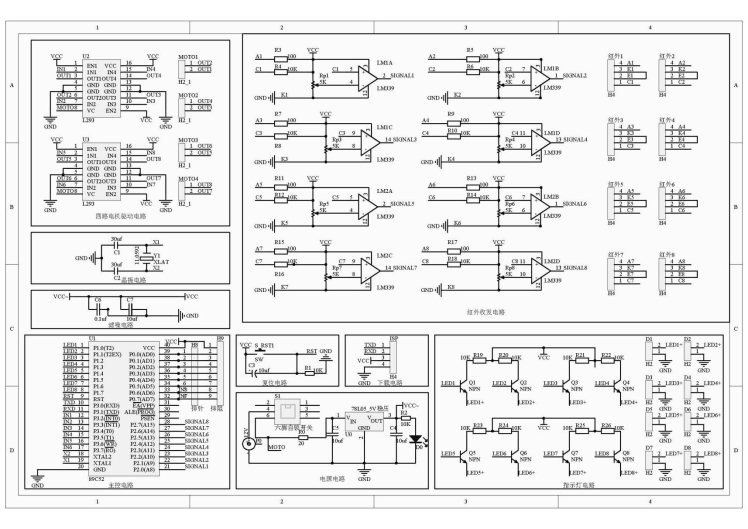
附录1:电路原理图









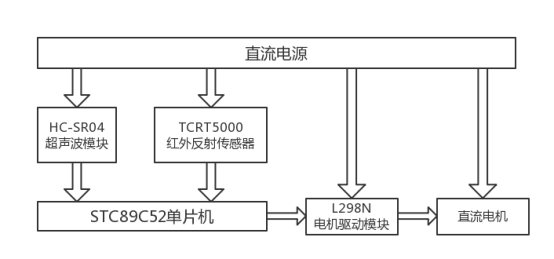
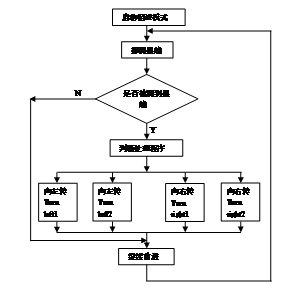
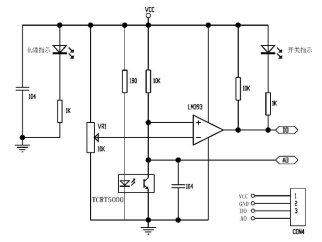 图6红外循迹传感器子系统框图
图6红外循迹传感器子系统框图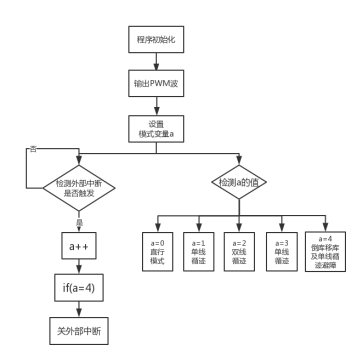

 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

