很实用的一个仿真控制学些方案
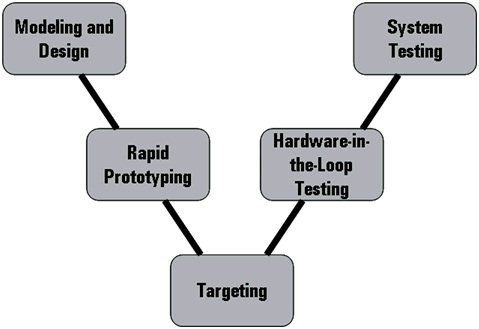
概念 快速控制原型设计(Rapid Control Prototyping)是一个在原型硬件上校准控制算法的过程,快速控制原型平台通常提供了一种方法来导入数学模型,并在与实际I/O连接的基于实时操作系统的控制器上运行这些数学模型。快速控制原型设计是一种快速方便验证控制算法的方法,用户可以实时地在硬件上测试算法,为检测程序设计节省大量时间以及专注创新提高效率。下图是一个典型的RCP阶段框图,也称为V型图。
第一阶段为仿真和控制算法设计,主要利用离线仿真工具来仿真受控系统,研究与设计控制算法与控制策略。并进行离线仿真,验证控制算法与系统工作状态。 第二个阶段为快速原型设计,主要是指完成原型控制器的设计与制作,包含了硬件接口等。 第三个阶段为部署控制算法,主要指将控制算法在原型控制器上实现。 第四个阶段为硬件在环测试,原型控制器+控制算法实现后需要进行功能性和正确性的验证,此时需要用一个实时仿真器来仿真真实的系统,然后用原型控制器和实时仿真器构成闭环,测试控制器的准确性,以及故障工况下控制器是否正常工作。这一步在把控制器直接接入真实系统前是必不可少的。 第五个阶段是系统测试,完成硬件在环测试后,可以将控制器直接接入真实系统,验证其功能性与正确性。 这五步完成后便完成了RCP的流程,可以量产控制器了。由此可以见其中非常重要的环节是快速原型控制器。 研究背景 在控制器的研发和生产中,传统基于DSP芯片自制PCB控制板的开发方式存在周期长,自制硬件可靠性差等问题。快速控制原型(Rapid Control Prototyping)作为一种高效的研发工具,能够帮助科研人员更快地做好原型开发和算法验证,能更好地保证质量并缩短研发的周期,在节省成本的同时加速成果的产出。快速控制原型系统在新能源领域有着巨大的市场和应用潜力,比如逆变器的控制系统,风力发电系统的控制器研发,微网系统的能量管理,储能系统的充放电控制等等。也能够运用在电动汽车中,比如电机驱动系统的控制器研发(MCU),汽车主控系统的研发与测试(VCU)等等。对工程人员设计与优化控制算法,提高系统性能,缩短研发周期有很大的帮助。 远宽能源快速控制原型平台 远宽能源提供了一套基于PXI平台的快速原型控制系统,可以完成算法快速部署,调试等内容,帮助设计者新的控制思路(方法)能在实时硬件上方便而快捷地进行测试。该平台有如下特点: - 易于部署:快速高效部署控制算法,减少二次开发负担。
- 易于联调:方便的与被控对象进行连接,快速发现控制算法中存在的问题。
- 应用广泛:配置强大的运算器与FPGA接口,资源丰富,适用多种应用方向。
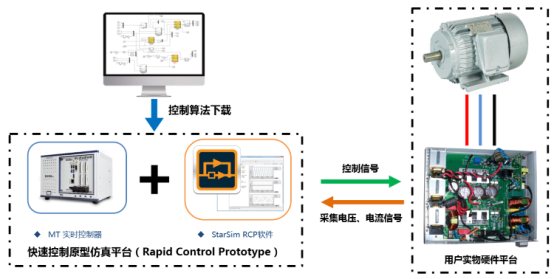
远宽能源的RCP平台可以帮助用户把图形化的高级语言编写的控制算法(Simulink或LabVIEW)下载到原型控制器上,节省在嵌入式芯片上重新编写和实现算法的过程;同时通过现成的硬件IO和实物被控对象(电机,变频器等)对接起来进行闭环控制,即可以加快项目周期,在一个验证过的硬件平台上开发,也可以隔离开发过程中的软硬件问题;同时StarSim RCP软件可以让用户很方便的在上位机观测实时控制器上的各种变量和波形,可以节省用户编写上位界面的时间与精力,让用户把精力放在核心的控制算法的实现和调试上。
完整的Word格式文档51黑下载地址:
 电机控制.doc
(207.5 KB, 下载次数: 5)
电机控制.doc
(207.5 KB, 下载次数: 5)
| 








 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

