这是我的双闭环直流调速实验
学习电力拖动的可以看看
一、实验目的 (1)、预习并加深理解双闭环不可逆直流调速系统的原理、组成及各主要单元部件的原理; (2)、完成双闭环直流调速调速系统的设计并熟悉直流调速系统的建模方法; (3)、掌握双闭环不可逆直流调速系统调节器参数的整定,以及调节器参数变化对系统性能的影响; (4)、熟悉Simulink仿真并应用电力系统模型进行直流调速系统的仿真。
二、实验要求 1、开环直流调速系统仿真:建立开环直流调速系统的仿真模型并进行仿真,观测并绘制直流电动机的转速与电枢电流曲线。 2、转速双闭环直流调速系统仿真:建立无静差转速负反馈双闭环直流调速系统模型并进行仿真,观测并绘制直流电动机的转速、电枢电流曲线。改变负载大小,观测并绘制负载改变时,直流电动机的转速、电枢电流曲线。改变系统的设计参数(比例和积分系数),观测参数变化对系统性能的影响。 (1)、进入MATLAB,单击MATLAB命令窗口工具栏中的SIMULINK图标,或直接键入SIMULINK命令,打开SIMULINK模块浏览器窗口 (2)、打开模型编辑窗口:通过单击SIMULINK工具栏中新模型的图标或选 File→New→Model菜单项实现。 (3)、复制相关模块:根据所设计的系统,找到需要的相关模块,以鼠标左键选中,拖入模型编辑窗口 (4)、修改模块参数:双击模块图案,则出现关于该图案的对话框,通过修改对话框内容来设定模块的参数。 (5)、模块的连接:以鼠标左键点击起点模块输出端,拖动鼠标至终点模块输入端处,则在两模块间产生“→”线。当一个信号要分送到不同模块的输入端时,需要绘制分支线,通常可把鼠标移到期望的分支线的起点处,按下鼠标的右键,看到光标变为十字后,拖动鼠标直至分支线的终点处,释放鼠标按钮,就完成了分支线的绘制。 (6)、仿真模型的运行: 1、仿真参数的设置:为了清晰地观测仿真结果,需要对示波器显示格式作一个修改,对示波器的默认值逐一改动。改动的方法有多种,其中一种方法是选中SIMULINK模型窗口的Simulation→Configuration Parameters菜单项,打开仿真控制参数对话框,对仿真控制参数进行设置。 其中的Start time和Stop time栏目分别允许填写仿真的起始时间和结束时间。结束时间可以根据实际情况进行修改。 2、仿真过程的启动:单击启动仿真工具条的按钮或选择Simulation→Start菜单项,则可启动仿真过程,再双击示波器模块就可以显示仿真结果。启动Scope工具条中的第六个按钮(望远镜)[自动刻度(Autosale)],它会使当前窗中信号的最大最小值为纵坐标的上下限,从而得到清晰的仿真结果曲线。 (7)、调节器参数的调整:在做仿真实验之前,首先应用工程设计方法,对系统进行设计,根据典型I型系统(电流环)和典型II型系统(转速环)的方法计算电流调节器和转速调节器的参数,然后利用MATLAB下的SIMULINK软件进行仿真,结合物理实验平台所能提供的条件,灵活修正调节器参数,直至得到满意的结果。 (1)、开环时系统的转速、电流曲线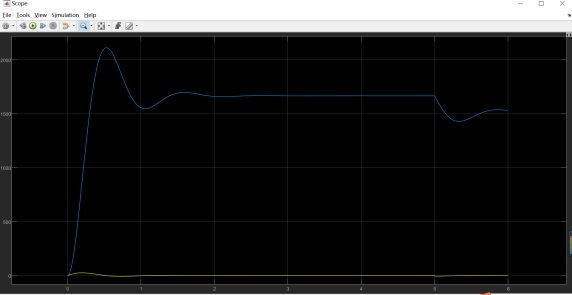
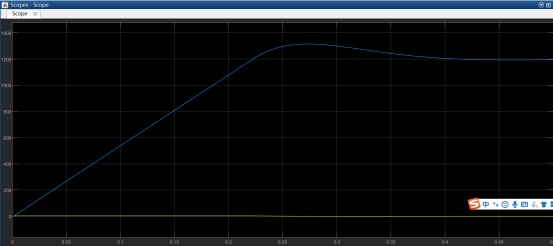
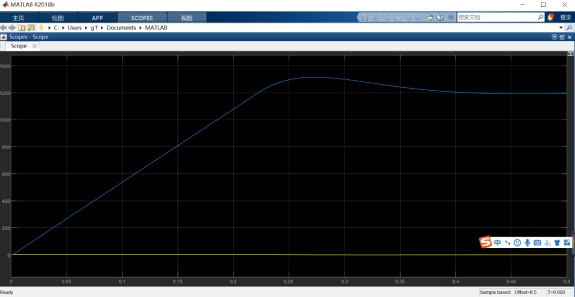
- 、改变负载大小,双闭环不可逆直流调速系统的转速、电流曲线
- 、改变系统中两个比例积分调节器的参数,观测参数对系统性能的影响
调大之后,系统稳定性变差,变得不稳定,参数改变可以减小稳态误差,改善系统静态误差。 本次实验因为xx缘故转变成仿真实验,进行学习,实验,对双闭环晶闸管这个实验有了不一样的理解,实验之前需要计算好阶跃等一系列得数,并且还要熟练运用软件,找到模块,修改系数,正常连线,然后得到仿真图片,能够明白这些问题的联系,实属不易,对于自身有着很大提高。
以上的Word格式文档51黑下载地址:
 双闭环.docx
(270.8 KB, 下载次数: 21)
双闭环.docx
(270.8 KB, 下载次数: 21)
| 









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

