|
制作平衡小车肯定会用到电机,那么怎么控制呢?最简单的就是直接加电压,这样电机就能转动,但是至于转多少圈,转的快慢是不能控制的。这就不符合我们平衡小车的控制要求。这就需要用到PWM模式来控制电压的大小,从而控制转的快慢。至于转了多少圈,就要用到编码器了。今天先来看看怎么控制小车转的快慢吧,一步一步来。 直流有刷电机的原理简单说下有刷电机的工作原理,其实很简单,稍微懂点物理的就能看懂吧。
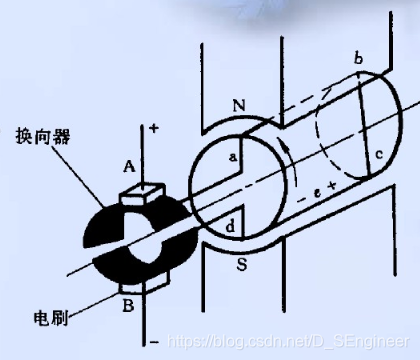
上面这张图应该都见过吧(因为你现在就在看着它呢,手动滑稽)。小时候四驱赛车的那种黄色小马达也都见过吧,是不是只要将电压加载电刷的两极上,电机就会转了。那个电机的内部结构就是上图这样。这一种里面带有电刷的电机叫有刷电机,又因为是用的直流电,所以叫直流有刷电机。
我们只需要将电压加到AB端,电机就能转,电机转动的速度和电压有关,电压越大,转速越高。具体电机旋转不懂的百度吧。我就不搬运了,重点是都后面的PWM。 有一点需要注意的是,直流有刷电机的驱动频率的问题,过高或者过低都不好,网上找了资料说是根据电机的不同频率有所不同,一般10k-20k。我暂且信了吧。 PWM是什么?既然知道了电压和转速成正比,那我们是不是只需要控制电压就能控制转速了。这就需要用到PWM技术了。PWM又名脉冲宽度调制,从名字上来看是调节脉冲宽度的。到底是怎么调节的呢?我是这样理解的。
本来我们直接给电压,电机就会转,现在我们通过控制电压,让他一会有输出,一会不输出。假设占空比为50%,也就是说,在一定时间内,电压有一半的时间是闭合的,一半的时间是打开的,这样求出来的平均电压值应该是原电压值的一半。(不相信的同学可以一会试试,我后面把代码传上来)这样我们就能控制电压了。但是只控制电压还不行呀,单片机引脚不能直接接到电机上呀,这就需要电机驱动器了。 TB6612直流有刷电机驱动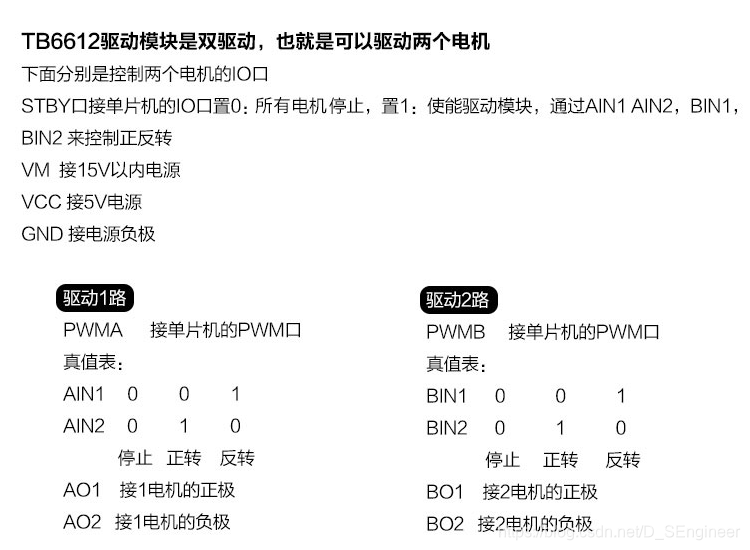
从淘宝截了一张图,上面有引脚和使用说明,接线也很简单。原理的话我没细看,大致应该是通过PWM来控制VM的电压值,之后会有一个像H桥一样的电路来控制正反转,当然了都是集成到芯片内部了。
STM32F103ZET6生成PWM代码/*使用通用定时器2 通道1 PA0引脚输出PWM------------ PWM信号 周期和占空比的计算 --------------- ARR :自动重装载寄存器的值 CLK_cnt:计数器的时钟,等于 Fck_int / (psc+1) = 72M/(psc+1) PWM 信号的周期 T = ARR * (1/CLK_cnt) = ARR*(PSC+1) / 72M 占空比P=CCR/(ARR+1) 时钟分频71,系统总线时钟72M,可以算出定时器时钟为72/(71+1)=1M在这里我们需要设定PWM频率为10Khz=0.1ms,因此自动重装载的值ARR=100.因为定时器时钟为1M=0.001ms,因此只需要累加100次,就等于0.1ms=10Khz了。占空比我们设定50%因此我们配置如下TIM_TimeBaseInitTypeStructure.TIM_Prescaler = 71; //定时器时钟分频TIM_TimeBaseInitTypeStructure.TIM_Period = (100 - 1); //自动重装载的值 TIM_OCInitTypeStructure.TIM_Pulse = 50; //设置占空比大小*/void PWM_Init(void){ //定义结构体变量 GPIO_InitTypeDef GPIO_InitTypeStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseInitTypeStructure; TIM_OCInitTypeDef TIM_OCInitTypeStructure; //使能引脚时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能引脚时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //引脚配置 GPIO_InitTypeStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出模式 GPIO_InitTypeStructure.GPIO_Pin = GPIO_Pin_0; //PA0 GPIO_InitTypeStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度为50M GPIO_Init(GPIOA, &GPIO_InitTypeStructure); //写入到寄存器中 //定时器基本配置 TIM_TimeBaseStructInit(&TIM_TimeBaseInitTypeStructure); //恢复默认值 //自动重装载寄存器的值,当TIM_Period+1个频率后产生一个更新或者中断 TIM_TimeBaseInitTypeStructure.TIM_Period = (100 - 1); //自动重装载的值 //驱动CNT计数器的时钟 = Fck_int/(psc+1) TIM_TimeBaseInitTypeStructure.TIM_Prescaler = 71; //定时器时钟分频 //时钟分频因子 ,配置死区时间时需要用到 TIM_TimeBaseInitTypeStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分割 //向上计数模式 TIM_TimeBaseInitTypeStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式 //重复计数器的值,没用到不用管 TIM_TimeBaseInitTypeStructure.TIM_RepetitionCounter = 0; //重复计数器的值. //写入到寄存器 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitTypeStructure); //PWM模式配置 TIM_OCStructInit(&TIM_OCInitTypeStructure); //恢复默认值 TIM_OCInitTypeStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择PWM1模式 TIM_OCInitTypeStructure.TIM_OCIdleState = TIM_OCIdleState_Set; //空闲时间的引脚电平 TIM_OCInitTypeStructure.TIM_OCPolarity = TIM_OCPolarity_High; //指定输出极性 TIM_OCInitTypeStructure.TIM_OutputState = TIM_OutputState_Enable; //输出比较使能 TIM_OCInitTypeStructure.TIM_Pulse = 80; //设置占空比大小 //初始化通道1 TIM_OC1Init(TIM2, &TIM_OCInitTypeStructure); //启用CCR1上的TIMx外设预加载寄存器。 TIM_OC1PreloadConfig(TIM2,TIM_OCPreload_Enable); //使能定时器 TIM_Cmd(TIM2,ENABLE);}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
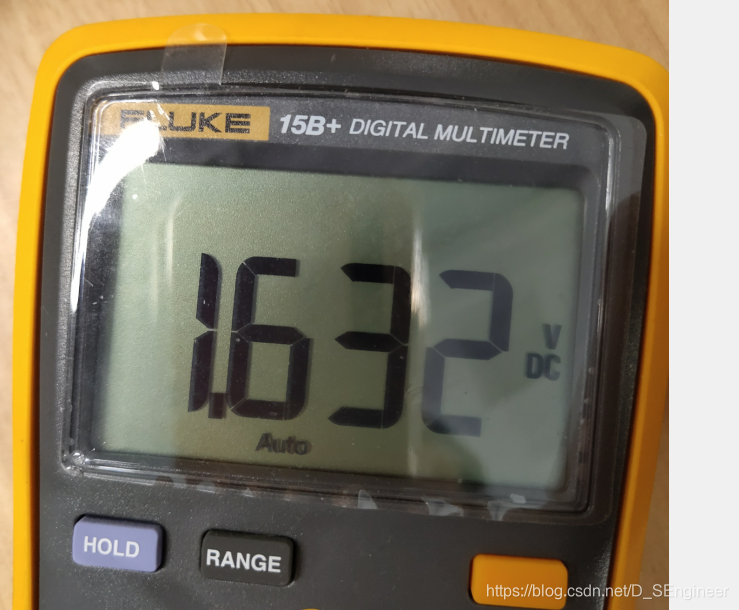
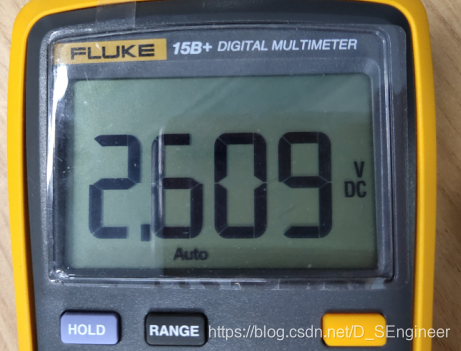
示波器测量1.当占空比为50%时
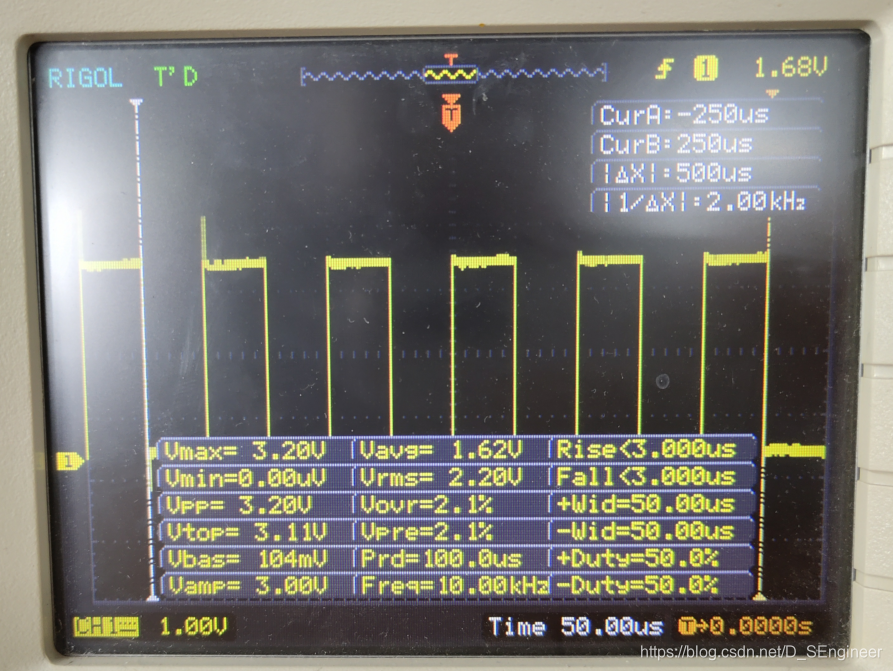
测量电压值
2.占空比为80%时

测量值
 总结1.PWM配置过程
①配置GPIO引脚,用的哪个引脚就配置哪个引脚,注意别忘了开启时钟使能
②配置完引脚,配置定时器基本参数
注意:
在配置TIM_Period的值的时候一定不要忘记最终计算的值是TIM_Period+1;
TIM_Prescaler在最终计算的值也是TIM_Prescaler+1。 TIM_TimeBaseStructInit(&TIM_TimeBaseInitTypeStructure); //恢复默认值
上面这个函数可要可不要,规范化代码最好是写上去。
③配置PWM输出通道
④启用CCR1上的TIMx外设预加载寄存器
⑤使能定时器 特别特别注意下面这个函数 //启用CCR1上的TIMx外设预加载寄存器。
TIM_OC1PreloadConfig(TIM2,TIM_OCPreload_Enable); 进入到函数主题 void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload){ uint16_t tmpccmr1 = 0; /* Check the parameters */ assert_param(IS_TIM_LIST8_PERIPH(TIMx)); assert_param(IS_TIM_OCPRELOAD_STATE(TIM_OCPreload)); tmpccmr1 = TIMx->CCMR1; /* Reset the OC1PE Bit */ tmpccmr1 &= (uint16_t)~((uint16_t)TIM_CCMR1_OC1PE); /* Enable or Disable the Output Compare Preload feature */ tmpccmr1 |= TIM_OCPreload; /* Write to TIMx CCMR1 register */ TIMx->CCMR1 = tmpccmr1;}中文手册中的寄存器说明
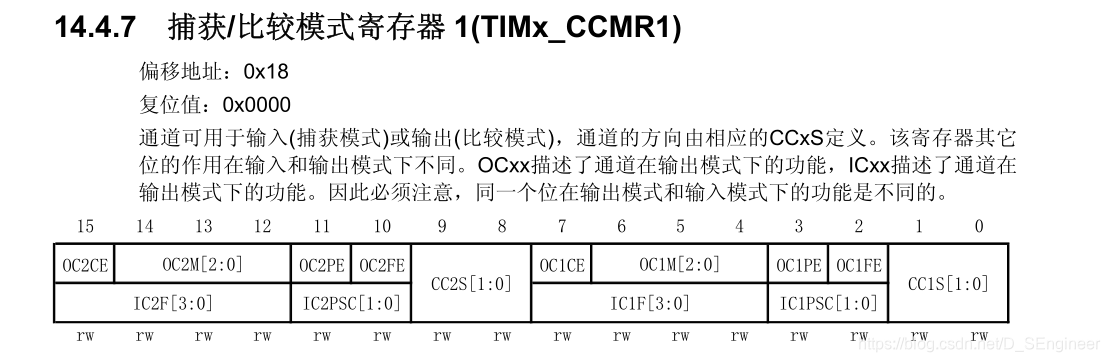
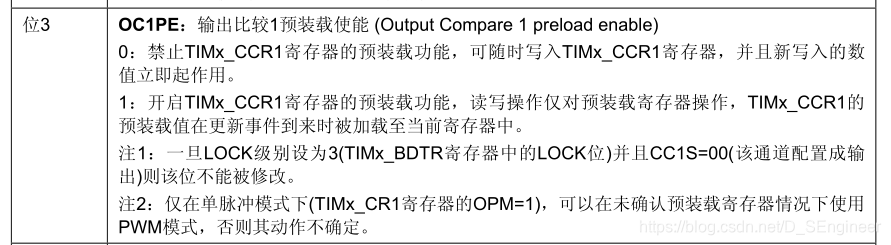
函数进来首先复位OC1PE位,之后再根据形参来决定该位置高还是置低。如果我们使能该位,则当我们在改变CCR1寄存器中的值的时候,他不会立即改变,而是将这个周期走完,下个周期才会更新CCR1 的值。 比如我们设定ARR=100,CCR1=50,累加器从0开始往上加,当OC1PE=0,我们在累加器加到30的时候突然改变CCR1的值,让CCR1=70,此时当累加器加到50的时候,电平是不会跳变的,因为OC1PE=0时,改变CCR1则会立即生效,此时已经将CCR1=70了,因此达到70才会跳变。 当OC1PE=1时,他不会在这个周期生效,累加器还会在50的时候跳变,在下一个周期才会从70跳变。 因为我写的这个程序中没有改变CCR1的值,所以该行代码写不写都没有什么影响。只不过我写的时候不明白这个函数是什么意思,就去搜索了一下,顺便把他记录下来。
| 








 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩 D_SEngineer?spm=1000.2115
D_SEngineer?spm=1000.2115


