Altium Designer画的THB6064步进电机驱动模块的电路原理图和PCB图如下:(51hei附件中可下载工程文件)

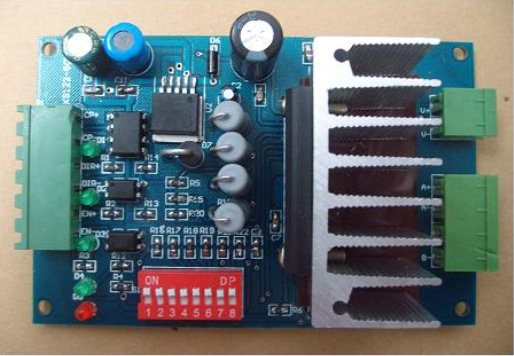
THB6064芯片与单片机控制的大功率、高细分两相混合式步进电机驱动模块的实物图如下:
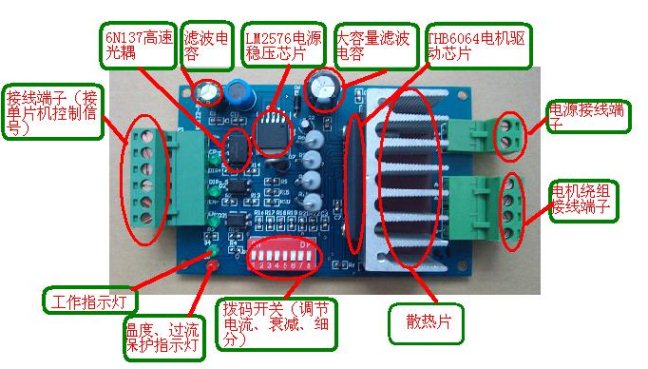
【标注图片】
【步进电机控制接线图】 用户可根据需要采用共阳极接法或者共阴极接法。 - 共阳极接法:分别将脉冲+、方向+、使能+连接在一起,连接到控制系统的电源上,如果此电源是+5伏,可直接接入,如果此电源大于+5伏,则需外部另加限流电阻R,保证给驱动器内部光耦提供8—15mA的驱动电流。输入信号低电平有效。
- 共阴极接法:分别将脉冲-、方向-、使能-,连接到控制系统的地端(SGND,与电源地隔离),输入信号高电平有效。限流电阻同上
拨码开关作用: 电机细分设定: (拨码开关常态均为低电平,接通为高电平。) 电流衰减设定: 工作电流设定:
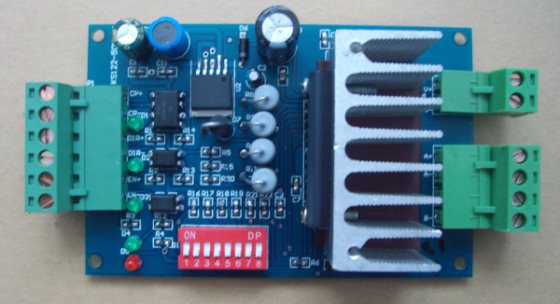
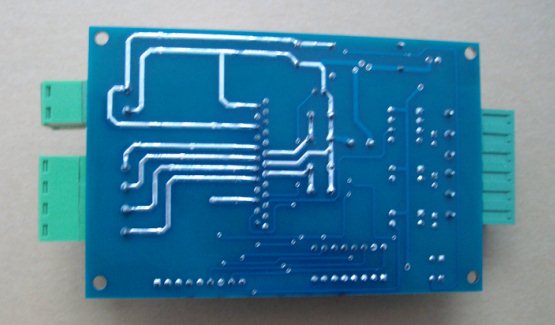
实物图片:
单片机步进电机调试源程序如下:
- ////////////////////////汇诚科技////////////////////
- ///////////////////步进电机调试程序/////////////////
- #include<reg52.h>
- #define uchar unsigned char
- #define uint unsigned int
- /********************************************************
- 控制位定义
- ********************************************************/
- sbit shi_neng=P1^0; // 使能控制位
- sbit fang_xiang=P1^1;// 旋转方向控制位
- sbit mai_chong=P1^2; // 脉冲控制位
- /********************************************************
- 延时函数
- ********************************************************/
- void delay(uint i)//延时函数
- {
- uchar j,k;
- for(j=0;j<i;j++)
- for(k=0;k<50;k++);
- }
- /********************************************************
- 主函数
- ********************************************************/
- main()
- {
- shi_neng=0; // 使能控制位
- fang_xiang=0;// 旋转方向控制位
- mai_chong=0; // 脉冲控制位
-
- while(1)
- {
- mai_chong=~mai_chong; //输出时钟脉冲
- delay(5); //延时 (括号内数值越小,电机转动速度越快)
-
- }
- }
- ////////////////////////汇诚科技////////////////////
- #include<reg52.h>
- #define uchar unsigned char
- #define uint unsigned int
- /********************************************************
- 控制位定义
- ********************************************************/
- sbit shi_neng=P1^0; // 使能控制位
- sbit fang_xiang=P1^1;// 旋转方向控制位
- sbit mai_chong=P1^2; // 脉冲控制位
- sbit qi_dong=P2^0;// 启动按钮
- sbit ting_zhi=P2^1;//停止按钮
- sbit zheng_zhuan=P2^2;//正转按钮
- sbit fan_zhuan=P2^3;// 反转按钮
- /********************************************************
- 延时函数
- ********************************************************/
- void delay(uint i)//延时函数
- {
- uchar j,k;
- for(j=0;j<i;j++)
- for(k=0;k<50;k++);
- }
- /********************************************************
- 主函数
- ********************************************************/
- main()
- {
- shi_neng=1; // 使能控制位
- fang_xiang=0;// 旋转方向控制位
- mai_chong=0; // 脉冲控制位
-
- while(1)
- {
- mai_chong=~mai_chong; //输出时钟脉冲
- delay(5); //延时 (括号内数值越小,电机转动速度越快)
- if(qi_dong==0) shi_neng=0; //启动按钮
- if(zheng_zhuan==0) fang_xiang=0;//正转按钮
- if(fan_zhuan==0) fang_xiang=1;// 反转
- if(ting_zhi==0) shi_neng=1;//停止
- }
- }
【简要说明】
一、 尺寸:长100mm、宽60mm、高30mm.
二、 主要芯片:THB6064、LM2576.
三、 双全桥MOSFET驱动,低导通电阻Ron=0.4Ω(上桥+下桥)
四、 高耐压42V,大电流4.5A(峰值,实际应用中不超过40V,4A)
五、 工作电压:控制信号直流4.5~5.5V;
六、 自动半流锁定功能
七、 衰减方式连续可调
八、 细分设定:(1、1/2、1\8、1\10、1/16、1\20、1\32、1/40、1\64)
九、特点:
1、具有电源指示、过流保护指示。
2、转速可调、工作方式,工作电流、衰减方式均可通过拨码开关调节
3、抗干扰能力强
4、具有温度保护和过电流保护
5、可单独控制多种规格的两相混合式步进电机
6、可实现最大功率160W
适用场合:单片机学习、电子竞赛、产品开发、毕业设计。。。
全套设计资料51hei下载地址:
| 



 [复制链接]
[复制链接]











 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩
 ,麻烦了~
,麻烦了~

