
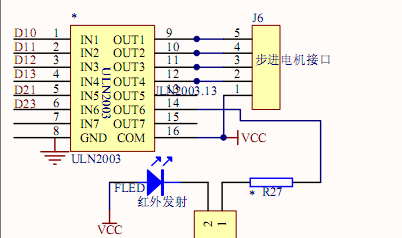
4相5线的步进电机,在51hei单片机开发板上用uln2003驱动,此程序可实现正反转和加减速功能。
电路图如下:
c语言源程序
#include <reg52.h>
sbit p10=P1^0;
sbit p11=P1^1;
sbit p12=P1^2;
sbit p13=P1^3;
sbit p32=P3^2;//减速
sbit p33=P3^3;//加速
sbit p34=P3^4;//正转
sbit p35=P3^5;//反转
#define A {p10=1;p11=0;p12=0;p13=0;}
#define B {p10=0;p11=1;p12=0;p13=0;}
#define C {p10=0;p11=0;p12=1;p13=0;}
#define D {p10=0;p11=0;p12=0;p13=1;}
#define OFF {p10=0;p11=0;p12=0;p13=0;}
#define uint unsigned int
#define uchar unsigned char
uchar HZ;
void Delay(uchar t)
{
while(--t);
}
void ms(uchar t)
{
while(t--)
{
Delay(245);
Delay(245);
}
}
void REV()//正转
{
A
ms(HZ);
B
ms(HZ);
C
ms(HZ);
D
ms(HZ);
}
void FWD()//反转
{
D
ms(HZ);
C
ms(HZ);
B
ms(HZ);
A
ms(HZ);
}
void main()
{
uint ddd;
HZ=5;
A1:
if(!p35)goto A2;
ddd=500;
while(1)
{
while(ddd)
{
if(!p32)
{
HZ++;
if(HZ>20)HZ=20;
}
if(!p33)
{
HZ--;
if(HZ<3)HZ=3;
}
REV();
ddd--;
if(!p34||!p35)goto A1;
}
while(1)
{
OFF
if(!p34||!p35)goto A1;
}
}
A2:
ddd=1000;
while(1)
{
OFF
while(ddd)
{
if(!p32)
{
HZ++;
if(HZ>30)HZ=30;
}
if(!p33)
{
HZ--;
if(HZ<3)HZ=3;
}
FWD();
ddd--;
if(!p34||!p35)goto A1;
}
while(1)
{
if(!p34)
goto A1;
if(!p35)goto A2;
}
}
}