
论坛新老朋友们。祝大家新年快乐。在新的一年开始的时候,给大家一点小小的玩意。工程师经常碰到需要多个串口通信的时候,而低端单片机大多只有一个串行口,甚至没有串口。这时候无论是选择高端芯片,还是更改系统设计都是比较麻烦的事。我把以前搞的用普通I/O口模拟串行口通讯的程序拿出来,供大家参考,希望各位兄弟轻点拍砖。基本原理:我们模拟的是串行口方式1.就是最普通的方式。一个起始位、8个数据位、一个停止位。模拟串行口最关键的就是要计算出每个位的时间。以波特率9600为例,每秒发9600个位,每个位就是1/9600秒,约104个微秒。我们需要做一个精确的延时,延时时间+对IO口置位的时间=104微秒。起始位是低状态,再延时一个位的时间。停止位是高状态,也是一个位的时间。数据位是8个位,发送时低位先发出去,接收时先接低位。了解这些以后,做个IO模拟串口的程序,就是很容易的事。我们开始。先上简单原理图:就一个MAX232芯片,没什么好说的,一看就明白。使用单片机普通I/O口,232数据输入端使用51单片机P3.2口(外部中断1口,接到普通口上也可以,模拟中断方式的串行口会有用。呵呵)。数据输出为P0.4(随便哪个口都行)。

下面这个程序,您只需吧P0.4 和P3.2 当成串口直接使用即可,经过测试完全没有问题.
2、底层函数代码如下:
sbit TXD1 = P0^4; //定义模拟输出脚
sbit RXD1 = P3^2; //定义模拟输入脚
bdata unsigned char SBUF1; //定义一个位操作变量
sbit SBUF1_bit0 = SBUF1^0;
sbit SBUF1_bit1 = SBUF1^1;
sbit SBUF1_bit2 = SBUF1^2;
sbit SBUF1_bit3 = SBUF1^3;
sbit SBUF1_bit4 = SBUF1^4;
sbit SBUF1_bit5 = SBUF1^5;
sbit SBUF1_bit6 = SBUF1^6;
sbit SBUF1_bit7 = SBUF1^7;
void delay_bps() {unsigned char i; for (i = 0; i < 29; i++); _nop_();_nop_();} //波特率9600 模拟一个9600波特率
unsigned char getchar2() //模拟接收一个字节数据
{
while (RXD1);
_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();
delay_bps();
SBUF1_bit0 = RXD1; //0
delay_bps();
SBUF1_bit1 = RXD1; //1
delay_bps();
SBUF1_bit2 = RXD1; //2
delay_bps();
SBUF1_bit3 = RXD1; //3
delay_bps();
SBUF1_bit4 = RXD1; //4
delay_bps();
SBUF1_bit5 = RXD1; //5
delay_bps();
SBUF1_bit6 = RXD1; //6
delay_bps();
SBUF1_bit7 = RXD1; //7
delay_bps();
return(SBUF1) ; //返回读取的数据
}
void putchar2(unsigned char input) //模拟发送一个字节数据
{
SBUF1 = input;
TXD1 = 0; //起始位
delay_bps();
TXD1 = SBUF1_bit0; //0
delay_bps();
TXD1 = SBUF1_bit1; //1
delay_bps();
TXD1 = SBUF1_bit2; //2
delay_bps();
TXD1 = SBUF1_bit3; //3
delay_bps();
TXD1 = SBUF1_bit4; //4
delay_bps();
TXD1 = SBUF1_bit5; //5
delay_bps();
TXD1 = SBUF1_bit6; //6
delay_bps();
TXD1 = SBUF1_bit7; //7
delay_bps();
TXD1 = 1; //停止位
delay_bps();
}
3、实现串行通讯。在主程序文件中直接调用上面的getchar2()和putchar2()函数,配合电脑的串行口,即可实现串行通讯功能
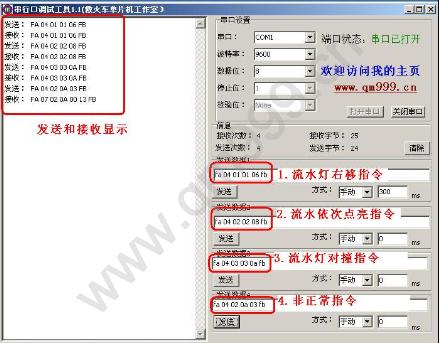
4、请参考完整程序文件,不过此串行通讯为程序查询方式,如果程序中有中断程序,很可能会造成接收数据丢失。在一会继续发一个帖子,把利用中断方式串行通讯程序也发来给大家看看。注意问题:1、波特率是可以有误差,但每个位的误差,不能大于3%2、中断可能会改变延时的时间。如果你的中断里的程序较长,应该在模拟串口接收和发送时禁止中断。3、接收时要延时1.5个的位时间(一个起始位+半个数据位)。使数据位的采样点尽量放在数据位的中间。
完整程序工程源代码:点击下载
主程序:
#include <reg51.h>
#include "delay.h"
#include "sub4094.c"
#include <intrins.h>
sbit spk = P2^5; //定义蜂鸣器使用的I/O口P2.5
sbit LED = P2^7;
#include "subuart2.c"
void main (void)
{
unsigned char first,zjgs,order,zhen_xh,jym,end; //定义起始字、字节个数、命令码、帧序号、校验码、结束字
unsigned char i; //定义1个随机变量
unsigned char sum; //定义单片机计算用的校验码
unsigned char LED_contrl; //指示灯控制字
unsigned contrl_1,contrl_2; //移位变量
//unsigned int delay_counter;
P5=0xEF; //使能流水灯,屏蔽数码管
P4=0x00; //流水灯全部点亮
update4094(); //刷新流水灯状态
delay_ms(300);
P4=0xFF; //流水灯全部熄灭
update4094(); //刷新流水灯状态
while(1)
{
first=getchar2(); //读取6个数据进行处理。
zjgs=getchar2();
order=getchar2();
zhen_xh=getchar2();
jym=getchar2();
end=getchar2();
if(0xfa != first) goto end;
sum=zjgs+order+zhen_xh;
if(sum != jym)
{
putchar2(0xfa); //起始字
putchar2(0x07); //字节个数
sum=0x07;
putchar2(order); //接收到的命令码
sum+=order;
putchar2(zhen_xh); //接收到的帧序号
putchar2(0x00); //命令校验错误标志位
sum+=zhen_xh;
putchar2(sum); //校验码
putchar2(0xfb);
//蜂鸣器发出报警声音,指示灯闪烁
for(i=0;i<8;i++)
{
LED=~LED; //取反指示灯
spk=~spk; //取反蜂鸣器
delay_ms(200);
}
goto end;
}
if(0xfb != end) goto end;
switch(order)
{
case 1: //将收到的命令返回给串行口
LED=0;
putchar2(first); //起始字
putchar2(zjgs); //字节个数
putchar2(order); //命令码
putchar2(zhen_xh); //帧序号
putchar2(jym); //校验码
putchar2(end); //结束字
delay_ms(50);
LED=1;
//流水灯效果 循环右移
P4=0xff; //熄灭所有指示灯
update4094();
LED_contrl=0x01; //初始化指示灯控制字节
delay_ms(50); //延时300MS
for(i=0;i<8;i++)
{
P4=~LED_contrl; //点亮控制字节相应指示灯
update4094();
delay_ms(50);
LED_contrl<<=1;
}
P4=0xff; //熄灭所有指示灯
update4094();
break;
case 2: //将收到的命令返回给串行口
putchar2(first); //起始字
putchar2(zjgs); //字节个数
putchar2(order); //命令码
putchar2(zhen_xh); //帧序号
putchar2(jym); //校验码
putchar2(end); //结束字
//流水灯效果 从左到右逐个点亮
P4=0xff; //熄灭所有指示灯
update4094();
LED_contrl=0xff; //初始化指示灯控制字节
delay_ms(50);
for(i=0;i<8;i++)
{
LED_contrl<<=1;
P4=LED_contrl;
update4094();
delay_ms(50);
}
break;
case 3: //将收到的命令返回给串行口
putchar2(first); //起始字
putchar2(zjgs); //字节个数
putchar2(order); //命令码
putchar2(zhen_xh); //帧序号
putchar2(jym); //校验码
putchar2(end); //结束字
//流水灯效果 循环对撞
P4=0xff; //熄灭所有指示灯
update4094();
contrl_1=0x02; //初始化移位变量1
contrl_2=0x80; //初始化移位变量2
delay_ms(50);
for(i=0;i<8;i++)
{
LED_contrl=contrl_1|contrl_2;
P4=~LED_contrl; //点亮控制字节相应指示灯
update4094();
delay_ms(50);
contrl_1<<=1; //移位变量1左移1位
contrl_2>>=1; //移位变量2右移1位
}
P4=0xff; //熄灭所有指示灯
update4094();
break;
default:break;
}
end:;
}
}