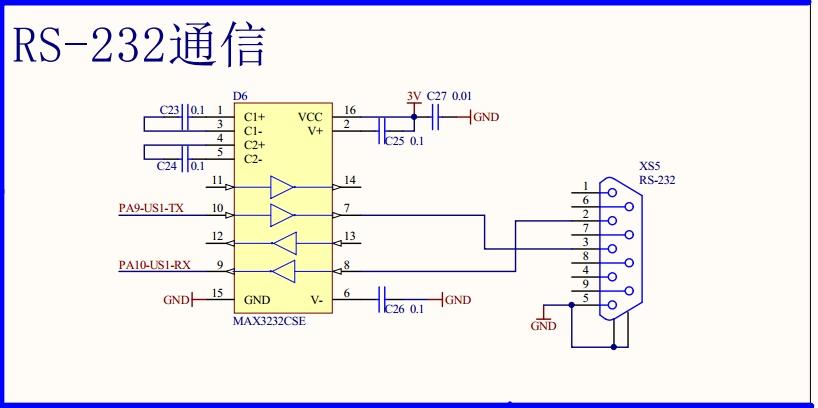
原理图:
头文件及完整例程下载:http://www.51hei.com/f/stm32标准例程库函数.rar
程序分析:
main.c
#include "stm32f10x.h"
#include "stm32f10x_usart.h"
#include "misc.h"
#include "stdarg.h"
/* Private variables ---------------------------------------------------------*/
USART_InitTypeDef USART_InitStructure;
uint8_t TxBuffer1[] = "USART Interrupt Example: This is USART1 DEMO";
uint8_t RxBuffer1[],rec_f,tx_flag;
__IO uint8_t TxCounter1 = 0x00;
__IO uint8_t RxCounter1 = 0x00;
uint32_t Rec_Len;
/* Private function prototypes -----------------------------------------------*/
void RCC_Configuration(void);
void GPIO_Configuration(void);
void NVIC_Configuration(void);
void Delay(__IO uint32_t nCount);
void USART_OUT(USART_TypeDef* USARTx, uint8_t *Data,...);
char *itoa(int value, char *string, int radix);
void USART_Config(USART_TypeDef* USARTx);
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStruct;
USART_ClockInitTypeDef USART_ClockInitStruct;
/****************************************************************************
* 名 称:USART_Config(USART_TypeDef* USARTx)
* 功 能:配置串口
* 入口参数:
* 出口参数:无
* 说 明:
* 调用方法:例如: USART_Config(USART1)
****************************************************************************/
void USART_Config(USART_TypeDef* USARTx){
USART_DeInit(USART1);
USART_InitStructure.USART_BaudRate = 9600; //速率115200bps
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位8位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位1位
USART_InitStructure.USART_Parity = USART_Parity_No; //无校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
/* Configure USART1 */
USART_Init(USARTx, &USART_InitStructure); //配置串口参数函数
/* Enable USART1 Receive and Transmit interrupts */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能接收中断
// USART_ITConfig(USART1, USART_IT_TXE, ENABLE); //使能发送缓冲空中断
USART_ClearFlag(USART1, USART_FLAG_TC );
/* Enable the USART1 */
USART_Cmd(USART1, ENABLE);
}
/****************************************************************************
* 名 称:int main(void)
* 功 能:奋斗板主函数
* 入口参数:无
* 出口参数:无
* 说 明:
* 调用方法:无
****************************************************************************/
int main(void)
{
uint8_t a=0;
/* System Clocks Configuration */
RCC_Configuration(); //系统时钟设置
/*嵌套向量中断控制器
配置了USART1的优先级分组为0,抢占优先级级别0(无) ,和响应优先级级别0(0-7) */
NVIC_Configuration(); //中断源配置
/*对控制LED指示灯的IO口进行了初始化,将端口配置为推挽上拉输出,口线速度为50Mhz。PA9,PA10端口复用为串口1的TX,RX。
在配置某个口线时,首先应对它所在的端口的时钟进行使能。否则无法配置成功,由于用到了端口B, 因此要对这个端口的时钟
进行使能,同时由于用到复用IO口功能用于配置串口。因此还要使能AFIO(复用功能IO)时钟。*/
GPIO_Configuration(); //端口初始化
USART_Config(USART1); //串口1初始化
USART_OUT(USART1,"****(C) COPYRIGHT 2013 奋斗嵌入式开发工作室 *******\r\n"); //向串口1发送开机字符。
USART_OUT(USART1,"* *\r\n");
USART_OUT(USART1,"* 奋斗版STM32开发板 USART1 实验 *\r\n");
USART_OUT(USART1,"* *\r\n");
USART_OUT(USART1,"* 以HEX模式输入一串数据,以16进制0d 0a作为结束 *\r\n");
USART_OUT(USART1,"* *\r\n");
USART_OUT(USART1,"* 奋斗STM32论坛:www.ourstm.net *\r\n");
USART_OUT(USART1,"* *\r\n");
USART_OUT(USART1,"***************************************************\r\n");
USART_OUT(USART1,"\r\n");
USART_OUT(USART1,"\r\n");
while (1)
{
if(rec_f==1){ //判断是否收到一帧有效数据
rec_f=0;
USART_OUT(USART1,"\r\n您发送的信息为: \r\n");
USART_OUT(USART1,&TxBuffer1[0]);
if(a==0) {GPIO_SetBits(GPIOB, GPIO_Pin_5); a=1;} //LED1 V6(V3V5板) V2(MINI板) 明暗闪烁
else {GPIO_ResetBits(GPIOB, GPIO_Pin_5);a=0; }
}
}
}
/****************************************************************************
* 名 称:void Delay(__IO uint32_t nCount)
* 功 能:延时函数
* 入口参数:无
* 出口参数:无
* 说 明:
* 调用方法:无
****************************************************************************/
void Delay(__IO uint32_t nCount)
{
for(; nCount != 0; nCount--);
}
/****************************************************************************
* 名 称:void USART_OUT(USART_TypeDef* USARTx, uint8_t *Data,...)
* 功 能:格式化串口输出函数
* 入口参数:USARTx: 指定串口
Data: 发送数组
...: 不定参数
* 出口参数:无
* 说 明:格式化串口输出函数
"\r" 回车符 USART_OUT(USART1, "abcdefg\r")
"\n" 换行符 USART_OUT(USART1, "abcdefg\r\n")
"%s" 字符串 USART_OUT(USART1, "字符串是:%s","abcdefg")
"%d" 十进制 USART_OUT(USART1, "a=%d",10)
* 调用方法:无
****************************************************************************/
void USART_OUT(USART_TypeDef* USARTx, uint8_t *Data,...){
const char *s;
int d;
char buf[16];
va_list ap;
va_start(ap, Data);
while(*Data!=0){ //判断是否到达字符串结束符
if(*Data==0x5c){ //'\'
switch (*++Data){
case 'r': //回车符
USART_SendData(USARTx, 0x0d);
Data++;
break;
case 'n': //换行符
USART_SendData(USARTx, 0x0a);
Data++;
break;
default:
Data++;
break;
}
}
else if(*Data=='%'){ //
switch (*++Data){
case 's': //字符串
s = va_arg(ap, const char *);
for ( ; *s; s++) {
USART_SendData(USARTx,*s);
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC)==RESET);
}
Data++;
break;
case 'd': //十进制
d = va_arg(ap, int);
itoa(d, buf, 10);
for (s = buf; *s; s++) {
USART_SendData(USARTx,*s);
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC)==RESET);
}
Data++;
break;
default:
Data++;
break;
}
}
else USART_SendData(USARTx, *Data++);
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC)==RESET);
}
}
/******************************************************
整形数据转字符串函数
char *itoa(int value, char *string, int radix)
radix=10 标示是10进制 非十进制,转换结果为0;
例:d=-379;
执行 itoa(d, buf, 10); 后
buf="-379"
**********************************************************/
char *itoa(int value, char *string, int radix)
{
int i, d;
int flag = 0;
char *ptr = string;
/* This implementation only works for decimal numbers. */
if (radix != 10)
{
*ptr = 0;
return string;
}
if (!value)
{
*ptr++ = 0x30;
*ptr = 0;
return string;
}
/* if this is a negative value insert the minus sign. */
if (value < 0)
{
*ptr++ = '-';
/* Make the value positive. */
value *= -1;
}
for (i = 10000; i > 0; i /= 10)
{
d = value / i;
if (d || flag)
{
*ptr++ = (char)(d + 0x30);
value -= (d * i);
flag = 1;
}
}
/* Null terminate the string. */
*ptr = 0;
return string;
} /* NCL_Itoa */
/****************************************************************************
* 名 称:void RCC_Configuration(void)
* 功 能:系统时钟配置为72MHZ, 外设时钟配置
* 入口参数:无
* 出口参数:无
* 说 明:
* 调用方法:无
****************************************************************************/
void RCC_Configuration(void)
{
SystemInit();
RCC_APB2PeriphClockCmd( RCC_APB2Periph_USART1 |RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB
| RCC_APB2Periph_GPIOD|RCC_APB2Periph_AFIO , ENABLE);
}
/****************************************************************************
* 名 称:void GPIO_Configuration(void)
* 功 能:通用IO口配置
* 入口参数:无
* 出口参数:无
* 说 明:
* 调用方法:
****************************************************************************/
void GPIO_Configuration(void)
{
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED1控制--PB5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* 默认复用功能 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //USART1 TX
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //A端口
/* 复用功能的输入引脚必须配置为输入模式(浮空/上拉/下拉的一种)*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //USART1 RX
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //复用浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //A端口
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //LCD背光控制
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_ResetBits(GPIOD, GPIO_Pin_13); //LCD背光关闭
}
/****************************************************************************
* 名 称:void NVIC_Configuration(void)
* 功 能:中断源配置
* 入口参数:无
* 出口参数:无
* 说 明:
* 调用方法:无
****************************************************************************/
void NVIC_Configuration(void)
{
/* 结构声明*/
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
/* Configure one bit for preemption priority */
/* 优先级组 说明了抢占优先级所用的位数,和响应优先级所用的位数 在这里是0, 4
0组: 抢占优先级占0位, 响应优先级占4位
1组: 抢占优先级占1位, 响应优先级占3位
2组: 抢占优先级占2位, 响应优先级占2位
3组: 抢占优先级占3位, 响应优先级占1位
4组: 抢占优先级占4位, 响应优先级占0位
*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //设置串口1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级 0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级为0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能
NVIC_Init(&NVIC_InitStructure);
}
/******************* (C) COPYRIGHT 2013 奋斗STM32 *****END OF FILE****/
初始化系统时钟,初始化RCC_APB2Periph_USART1(串口USART1) ,RCC_APB2Periph_GPIOA(PA9,PA10) ,RCC_APB2Periph_GPIOB (LED灯),RCC_APB2Periph_GPIOD(LCD背光)
void RCC_Configuration(void)
{
SystemInit();
RCC_APB2PeriphClockCmd( RCC_APB2Periph_USART1 |RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB
| RCC_APB2Periph_GPIOD, ENABLE);
}
中断向量表串口NVIC_PriorityGroup_0 ,初始化USART1
void NVIC_Configuration(void)
{
/* 结构声明*/
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
/* Configure one bit for preemption priority */
/* 优先级组 说明了抢占优先级所用的位数,和响应优先级所用的位数 在这里是0, 4
0组: 抢占优先级占0位, 响应优先级占4位
1组: 抢占优先级占1位, 响应优先级占3位
2组: 抢占优先级占2位, 响应优先级占2位
3组: 抢占优先级占3位, 响应优先级占1位
4组: 抢占优先级占4位, 响应优先级占0位
*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //设置串口1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级 0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级为0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能
NVIC_Init(&NVIC_InitStructure);
}
初始化GPIO口,TX:GPIO_Mode_Out_PP ,RX:GPIO_Mode_AF_PP,PB5为低电平
void GPIO_Configuration(void)
{
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED1控制--PB5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* 默认复用功能 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //USART1 TX
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //A端口
/* 复用功能的输入引脚必须配置为输入模式(浮空/上拉/下拉的一种)*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //USART1 RX
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //复用浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //A端口
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //LCD背光控制
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_ResetBits(GPIOD, GPIO_Pin_13); //LCD背光关闭
}
初始化USART1 ,允许发送,接收中断
void USART_Config(USART_TypeDef* USARTx){
USART_DeInit(USART1);
USART_InitStructure.USART_BaudRate = 9600; //速率115200bps
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位8位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位1位
USART_InitStructure.USART_Parity = USART_Parity_No; //无校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
/* Configure USART1 */
USART_Init(USART1, &USART_InitStructure); //配置串口参数函数
/* Enable USART1 Receive and Transmit interrupts */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能接收中断
USART_ITConfig(USART1, USART_IT_TXE, ENABLE); //使能发送缓冲空中断
// USART_ClearFlag(USART1, USART_FLAG_TC );
/* Enable the USART1 */
USART_Cmd(USART1, ENABLE);
}
发送函数
void USART_OUT(USART_TypeDef* USARTx, uint8_t *Data,...){
const char *s;
int d;
char buf[16];
va_list ap;
va_start(ap, Data);
while(*Data!=0){ //判断是否到达字符串结束符
if(*Data==0x5c){ //'\'
switch (*++Data){
case 'r': //回车符
USART_SendData(USARTx, 0x0d); //发送0X0d
Data++;
break;
case 'n': //换行符
USART_SendData(USARTx, 0x0a);
Data++;
break;
default:
Data++;
break;
}
}
else if(*Data=='%'){ //
switch (*++Data){
case 's': //字符串
s = va_arg(ap, const char *);
for ( ; *s; s++) {
USART_SendData(USARTx,*s);
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC)==RESET);
}
Data++;
break;
case 'd': //十进制
d = va_arg(ap, int);
itoa(d, buf, 10);
for (s = buf; *s; s++) {
USART_SendData(USARTx,*s);
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC)==RESET);
}
Data++;
break;
default:
Data++;
break;
}
}
else USART_SendData(USARTx, *Data++);
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC)==RESET);
}
}
中断函数
void USART1_IRQHandler(void) //串口1 中断服务程序
{
unsigned int i;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //判断读寄存器是否非空
{
RxBuffer1[RxCounter1++] = USART_ReceiveData(USART1); //将读寄存器的数据缓存到接收缓冲区里
if(RxBuffer1[RxCounter1-2]==0x0d&&RxBuffer1[RxCounter1-1]==0x0a) //判断结束标志是否是0x0d 0x0a
{
for(i=0; i< RxCounter1; i++) TxBuffer1[i] = RxBuffer1[i]; //将接收缓冲器的数据转到发送缓冲区,准备转发
rec_f=1; //接收成功标志
TxBuffer1[RxCounter1]=0; //发送缓冲区结束符
RxCounter1=0;
}
}
if(USART_GetITStatus(USART1, USART_IT_TXE) != RESET)
{
USART_ITConfig(USART1, USART_IT_TXE, ENABLE);
}
}

